本机器人结构应该说比较简单,除了上述图片里的4样东西外,就是一个USB摄像头和一块航模专用12V锂电池(与电机电压一致),一共6样东西。所有这些东西都不需要螺丝固定,多数都使用3M双面胶粘在小车上,只有电池是用魔术贴贴在小车上的,因为电池可能会有老化的问题,时间长了可能需要更换,其他电路部分一般不会损坏,所以干脆直接粘上,省去找螺丝孔位的烦恼。
上一篇的4个东西单独拍照是因为它们有一个共同点,他们都是电路板,为了防止短路,最好底部先用亚克力板固定,然后再把亚克力板用3M胶粘到小车上,这样防止短路而且万一哪天要拆下来对电子器件的损坏也可以降到最低。(respeaker模块直接插到树莓派GPIO上已经很牢固,不需要额外铜柱固定,这一组合在后文硬件介绍中统称为树莓派)。推荐购买Arduino和树莓派时顺便买好配套的亚克力外壳,这样下半部分的外壳就能直接使用,不需要重新开孔了。树莓派由于插上了respeaker,虽然不用开孔,但是侧面的面板要稍微修改一下,把突出的部分剪掉,保证不会影响respeaker就行。
除了树莓派和Arduino外,另外的电机控制板和超声波模块也需要亚克力板,可以把前面用剩下的板子拿来改装一下,本文中电机控制板使用的是树莓派外壳的上盖,超声波模块使用的是Arduino的亚克力外壳的侧面剩余部分。
做完这些后就可以组装小车底盘了。首先焊接电机,同侧两个电机不可能反向旋转,因此不妨把它们焊接在一起。焊接之前可以先用12V电池接上电机两侧观察旋转方向,要保证电池接上后同侧两个电机旋转方向一致。
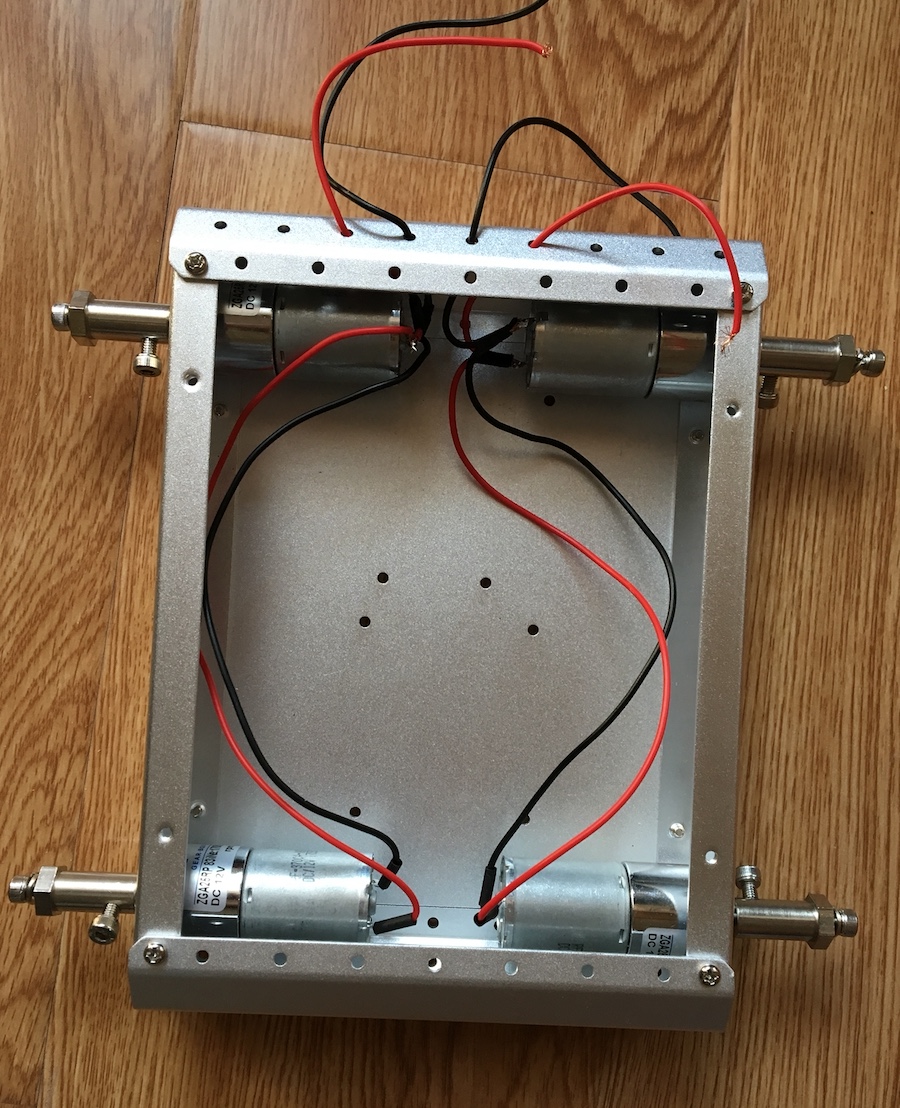
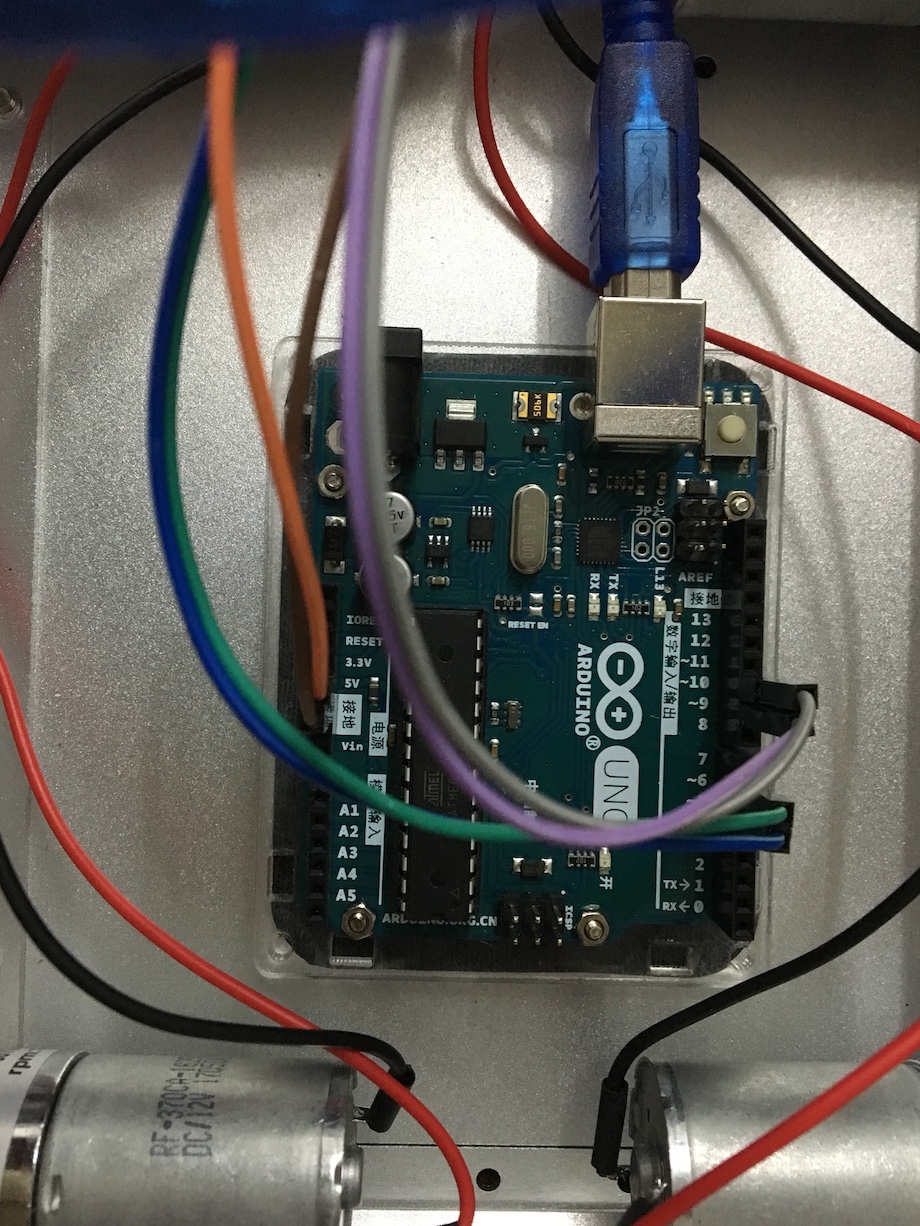
焊接完后就可以把Arduino放进底盘中了,在完全固定前最好先比划一下,给USB线留出一定空间。这个USB线稍后会连接到树莓派上,用于下载单片机程序和后续的串口通信使用。另外Arduino的5、6和9、10引脚要引出来,用于连到电机控制板上,它们分别控制了一侧的电机,电机线和电机控制信号线的极性不重要,如果实际使用发现方向反了,就把线对掉就行。Arduino上还要引出5V和接地线,它们也会连到电机板上,这是用于给Arduino供电用的,这个极性不能反。(但是Arduino也可以靠USB供电,到时插在树莓派上后这两根线不接可能也能用,以后可以试试)。
这样内部就基本装完了,可以把盖子合上。并且把轮子装起来了。

底盘的上盖板合上后可以把树莓派和电机驱动板固定上去,注意要给树莓派和电机控制板之间的USB线留出空间。然后电池也可以用魔术贴贴到小车底盘尾部。
树莓派和电机驱动板之间用USB连接,这样树莓派就可以直接使用电机驱动板上的电能,不需要额外的充电宝。树莓派和Arduino之间也是用USB线连接,这样没有串口电平转换的问题。
电机驱动板上的接线对没经验的朋友可能稍微复杂了些,但是理解概念后也不太难。其实这个电机驱动板就是起到放大的作用,把Arduino上微弱的控制信号放大为可以驱动电机的信号。Arduino的电机控制引脚对于每组电机各一对信号线,当一根是High (+5V)另一根是Low (0V)时代表电机正转,如果反一反一根是Low (0V)另一根是High(+5V)就对应电机正转,但是这样的信号不足以驱动我们的电机,经过L298N模块后5V口转变为12V并且支持大电流供电,0V信号口对应的还是0V,这就是L298N的作用。具体的对应关系是电机驱动板上IN1 IN2对应OUT1 OUT2,IN5 IN6对应OUT5 OUT6,其它以此类推。另外电机驱动板上的5V和GND可以用来给其它电路供电,比如本项目里就用来给Arduino供电,后面还会说到给超声波模块供电。(其实树莓派也可以用这种方式供电,本文没有用是因为树莓派的GPIO口都被Respeaker占用了)。这些引脚的关系可以通过上一篇推荐的示波器来进行测量,如果要做电机调速,还可以让Arduino输出PWM波,而不是恒定的5V电平,达到控制速度的效果(本项目暂时没有用)。
这样本项目的核心器件你就装完了,可以先把Arduino的程序写入并且在树莓派上运行树莓派坦克使用的服务器端,然后电脑上运行客户端,做一下人工控制,看看各电机方向是否和预想的一致,如果不一致还可以调整一下。
这一步做完后,再进行后续的安装,也就是超声波模块和摄像头的安装。先装超声波模块,如图所示。由于本文的超声波支持单线模式,因此只需要连接INPUT、GND和5V,把这些杜邦线从小车前方孔位塞入底盘,然后把超声波模块贴好。
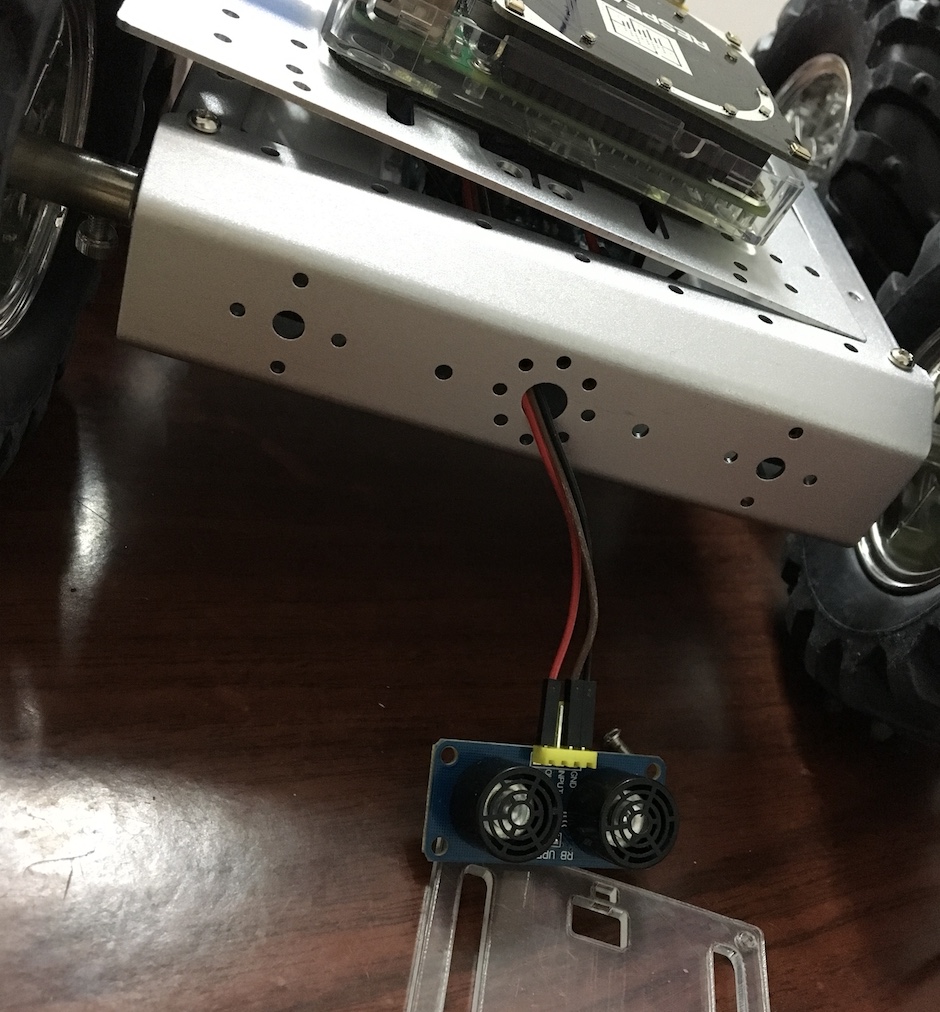
这个模块只需要把信号线连到Arduino的的8口上即可,GND可以接到Arduino上,5V由于Arduino口现在已经接东西了,所以可以延长一下直接接到电机驱动板的其它5V口上。
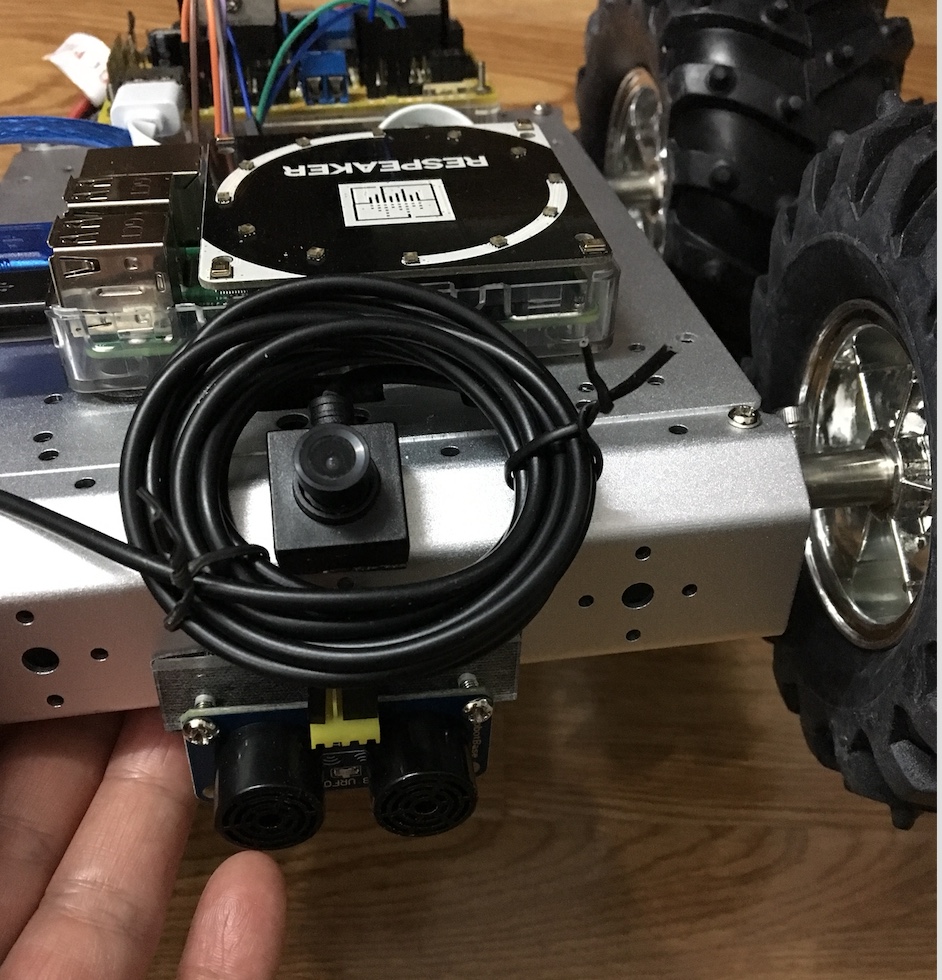
最后是摄像头,可以用3M胶贴到小车前部的斜面上,便于将来观察摄像头图像,多余的USB线可以绕几圈,然后随便找个树莓派的USB口插上就好了。
应该说本小车的硬件安装是比较简单的,难点还是在亚克力面板的钻孔以及两条USB线的摆放上,其它的机械部件安装都很方便。