ROS机器人程序设计(原书第2版)学习镜像分享及使用说明
ROS机器人操作系统在线练习课程正在逐步完善中,目前以ROS官网中文资料制作,
CSDN下载ROS基础资源汇总:http://download.csdn.net/album/detail/4431
通过网页快速了解Linux(Ubuntu)和ROS机器人操作系统,请参考实验楼在线系统如下:
初级教程可参考:https://www.shiyanlou.com/courses/854 邀请码:U23ERF8H
中级教程可参考:https://www.shiyanlou.com/courses/938 邀请码:U9SVZMKH
如果不熟悉Linux系统,推荐在虚拟机直接安装iso镜像学习,参考如下:
系统用于ROS爱好者学习交流,也可用于其他用途,并不局限于ROS。博客推荐:
AoboSir:1 http://www.aobosir.com/ 2 http://blog.csdn.net/github_35160620
这款镜像文件是基于一年前的Ubuntu ROS Arduino Gazebo学习镜像iso说明(indigo版)
经过更新制作而成,已安装的Ubuntu14.04和ROS(indigo)均更新到2016年11月24日,
链接: https://pan.baidu.com/s/1c3xgjvU 密码: gcbx
Ubuntu 16.04和ROS(Kinetic)学习镜像。
链接: https://pan.baidu.com/s/1hulIXwC 密码: 7udr
并做了适当调整和优化,如果不安装使用Live CD也可以学习书中大部分示例。密码:cslg或exbot
安装测试内存推荐4GB以上,3GB以下可能出现问题。系统安装了基本使用的软件,搜狗输入法,SMPlayer,Tweak等,机器人软件有Gazebo,已经加载必要的模型库,避免由于网络问题出现空地图的情况;删除了V-REP的EDU版本,已经配置好ROS By Example和Learning ROS for Robotics Programming - Second Edition所有的库,包括OpenCV non-free等库。镜像中所有软件以及资料的版权属于原作者。
下面给出具体使用说明:
1-镜像下载与制作:特别说明请下载Universal-USB-Installer用于制作启动盘
具体请参考ROS kinetic镜像制作部分,链接:http://blog.csdn.net/zhangrelay/article/details/54632130
镜像下载地址:http://pan.baidu.com/s/1dFkhezJ
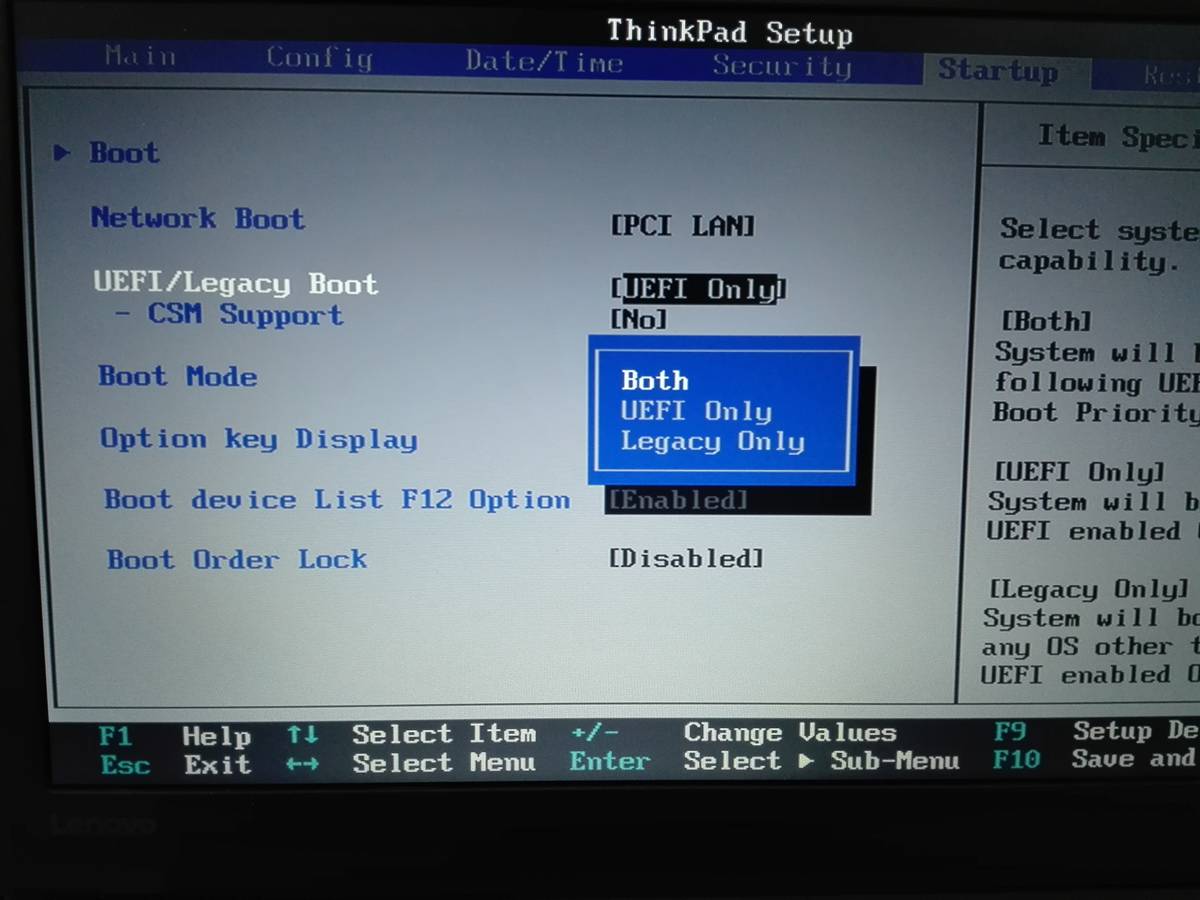
UEFI启动模式不建议使用最新版UltraISO制作U盘启动镜像,或者直接刻盘。
等待写入完成后,设置为U盘启动,即可使用,一年前发布版本和如今更新版,
已经测试过20+不同类型的台式机和笔记本电脑,均可使用,但也不排除兼容性问题。
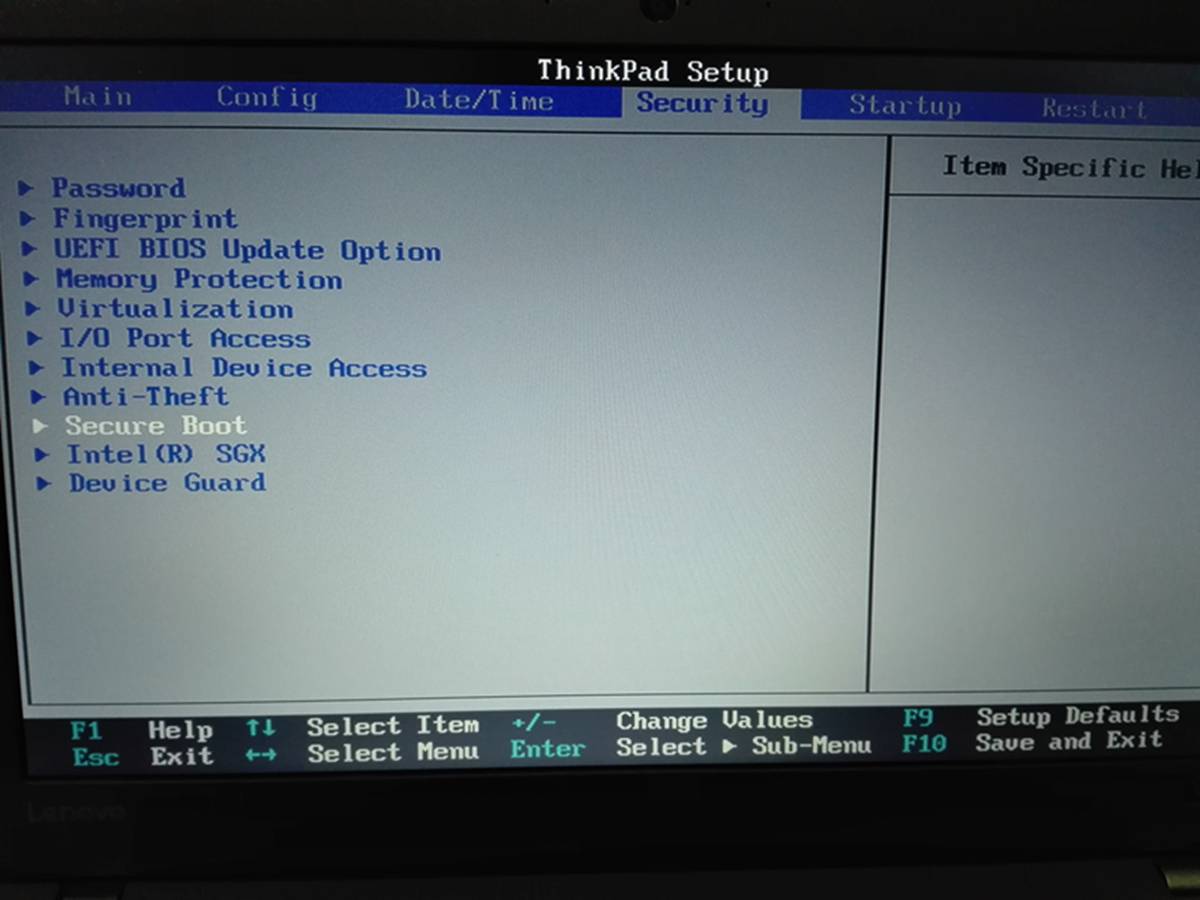
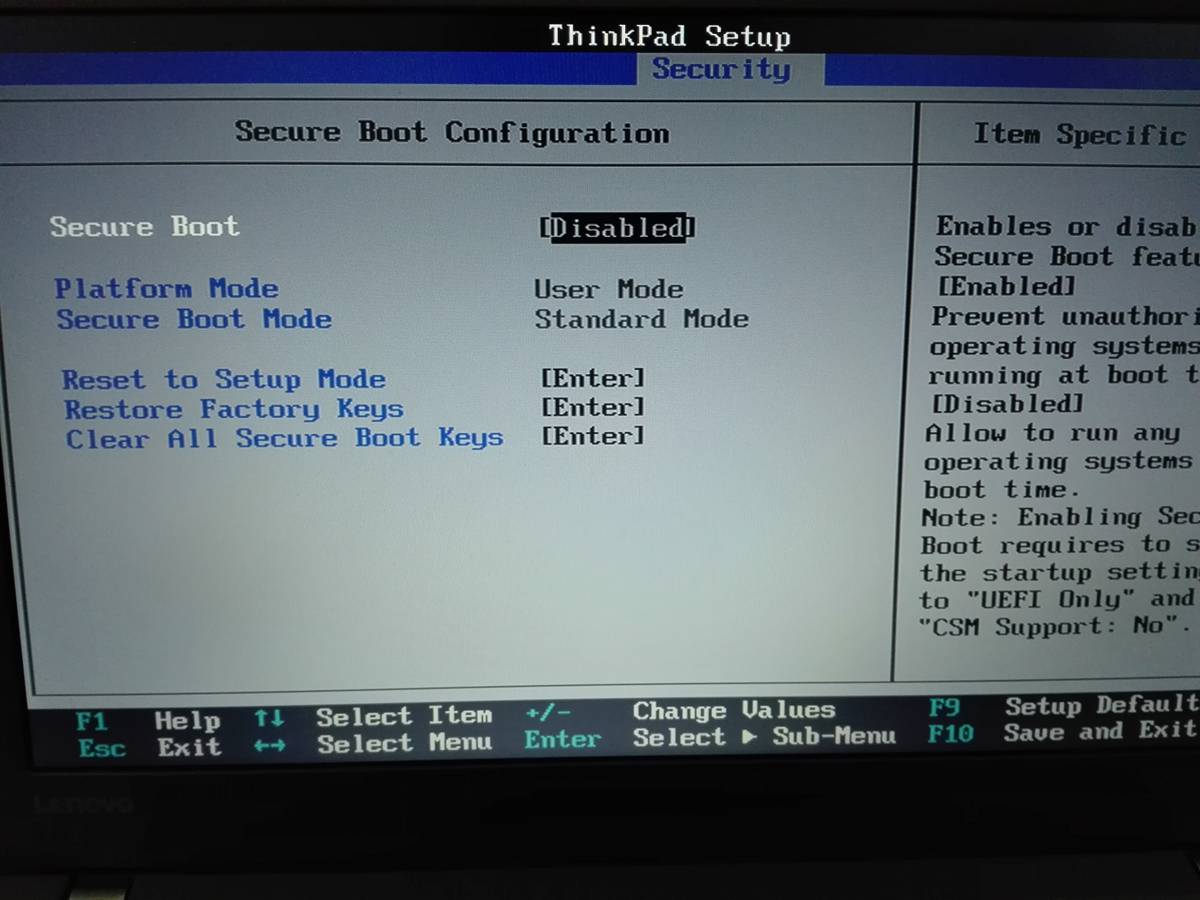
如果是UEFI等安全选项问题,请参考:
下面将直接在U盘启动的系统介绍,该版本系统的使用。
2-镜像使用:
开机设置U盘启动或插入刻录好的光驱,出现机器人背景的菜单后,选择第一项live,即可试用该系统。
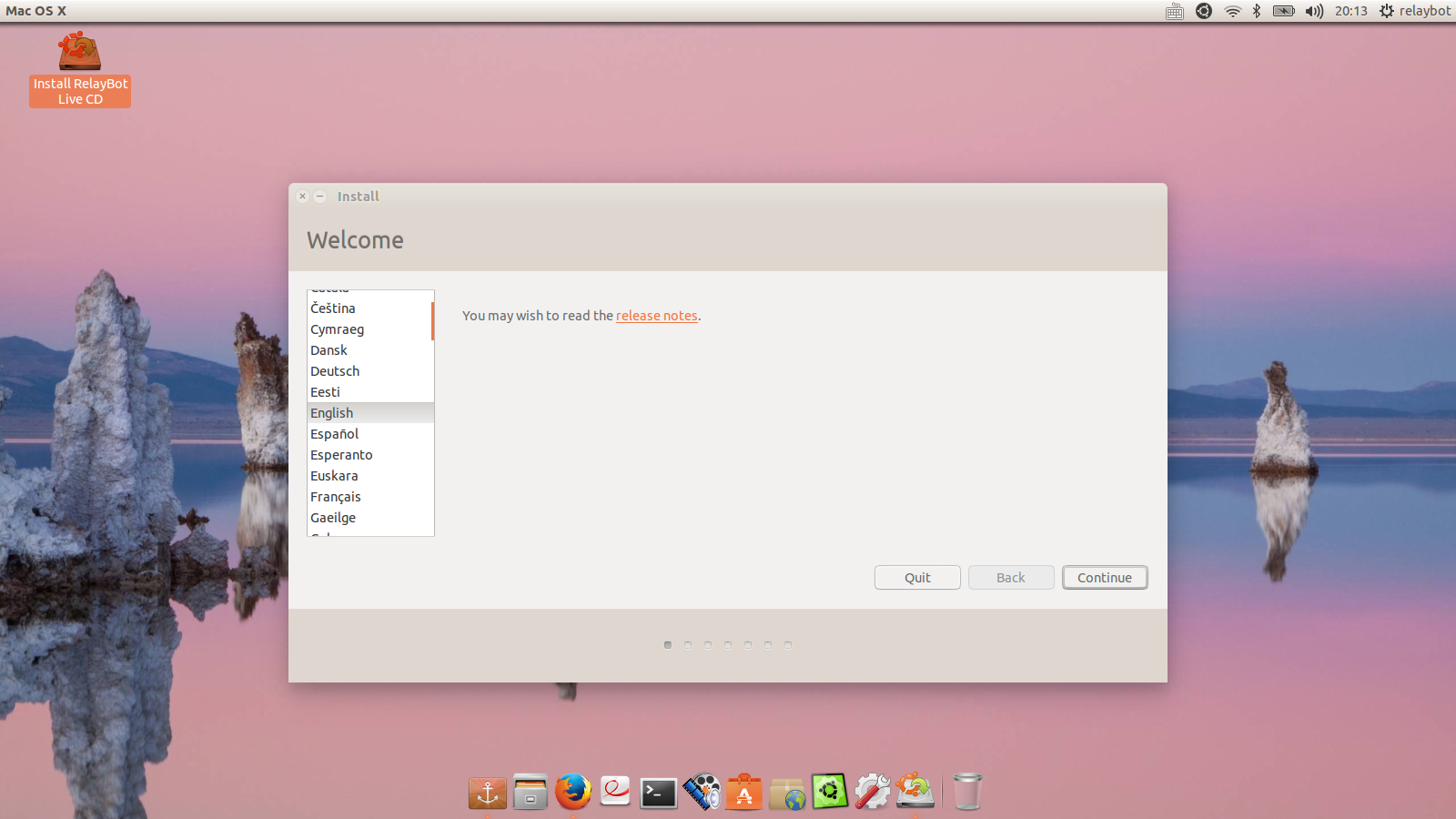
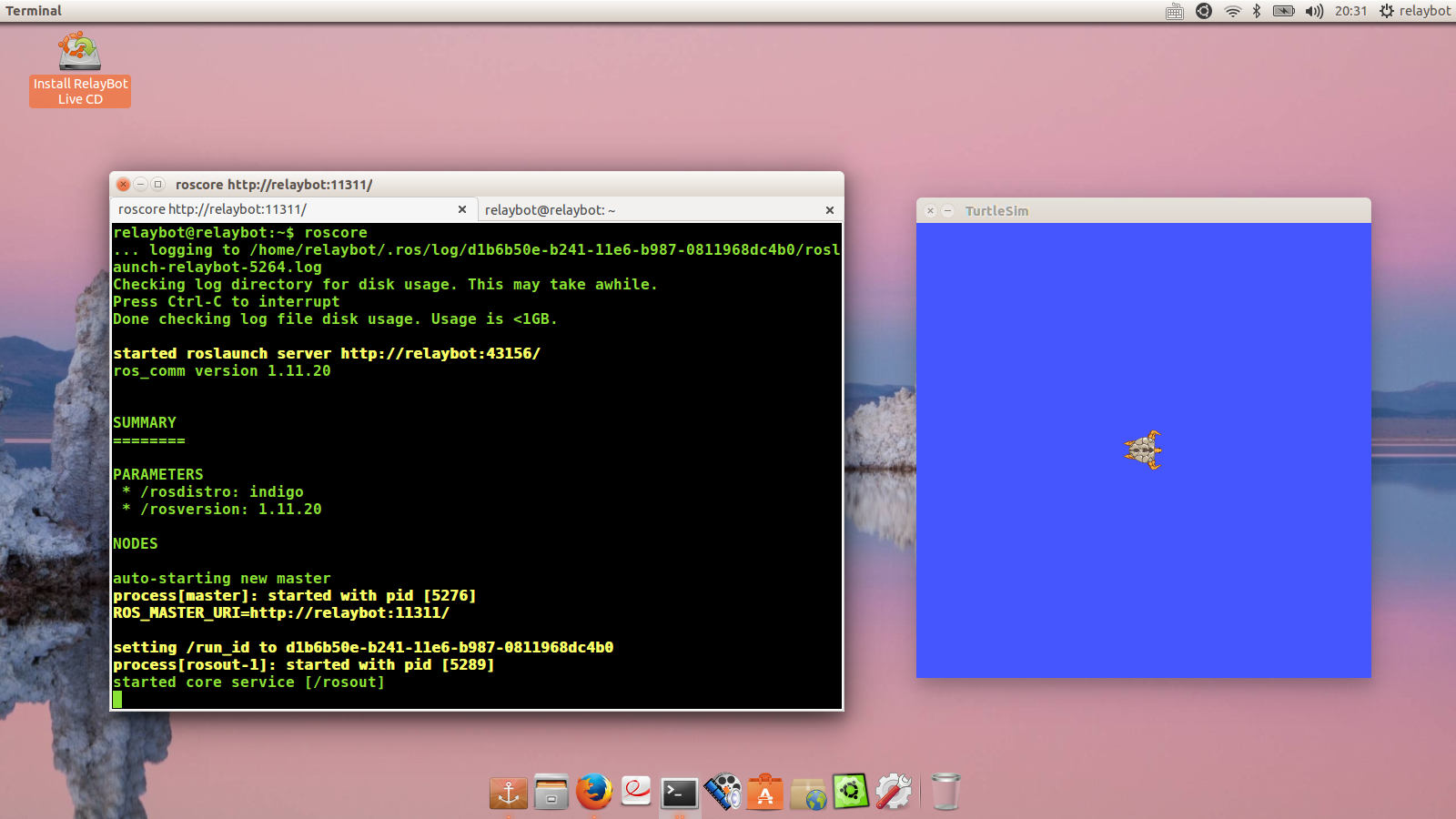
进入系统后,界面如下:

点击左上角Install RelayBot Live CD,按照ubuntu的安装步骤即可安装到本机。
下面介绍不安装的使用:
输入法:已经安装了搜狗输入法并更新了词库,可用快捷键Shift切换中英文输入。
如果需要上网或看在线视频等,火狐已经安装了flash插件。
其他Ubuntu功能不做介绍了,下面介绍catkin_ws中已经编译过的功能包:
功能包包括rbx1,rbx2和ROS机器人程序设计indigo版等。
首先,测试以下ROS和turtle,如下:
Gazebo:
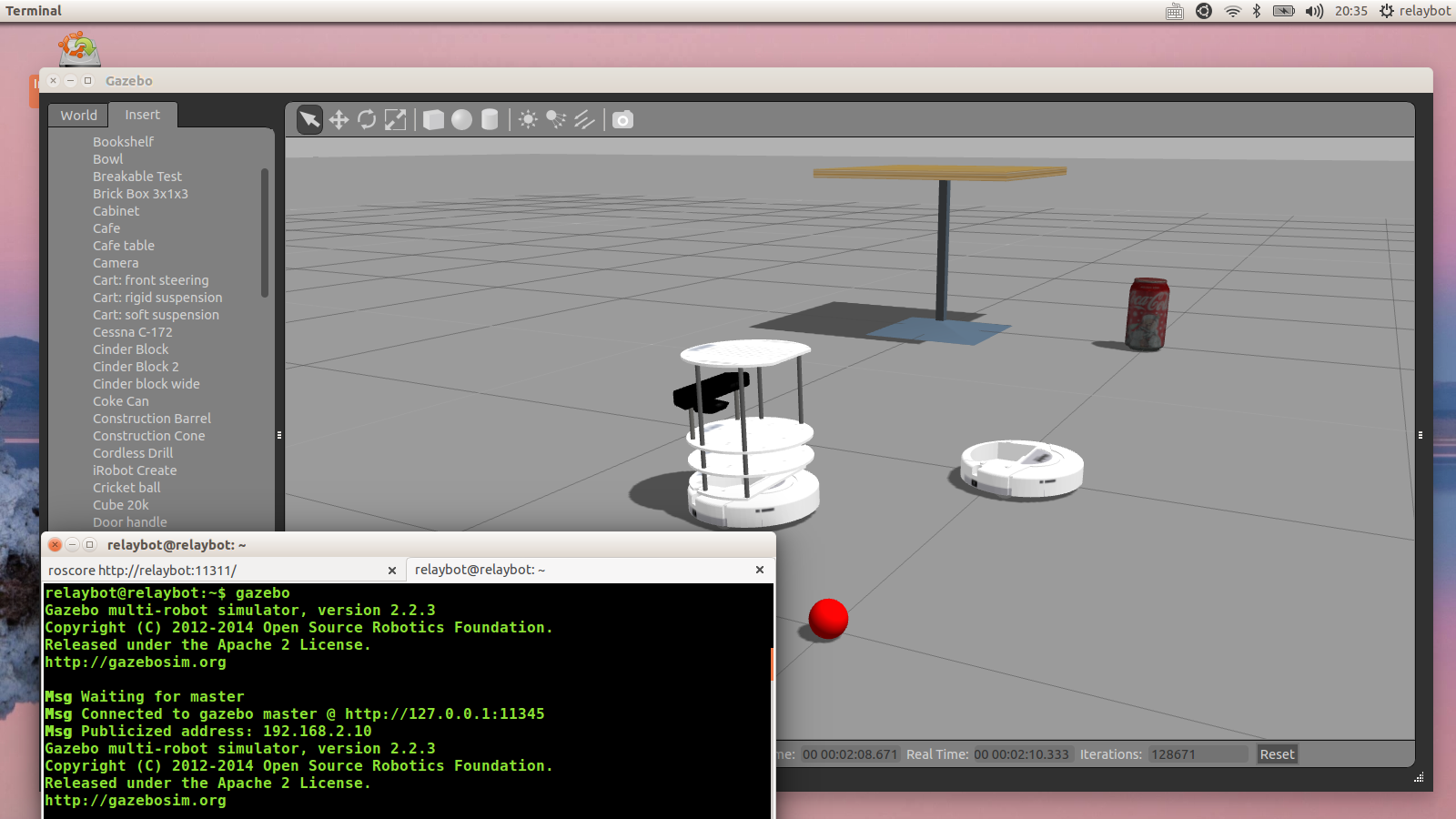
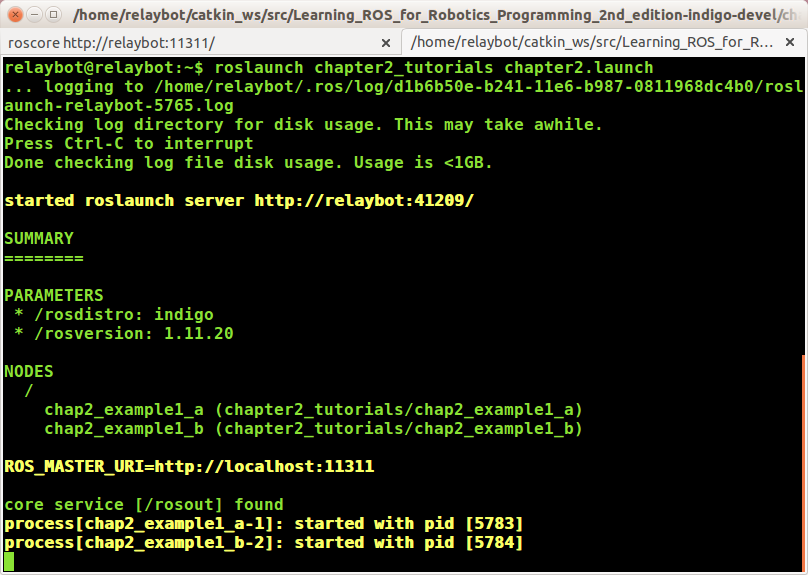
ROS机器人程序设计(原书第2版)第2章49页,示例:
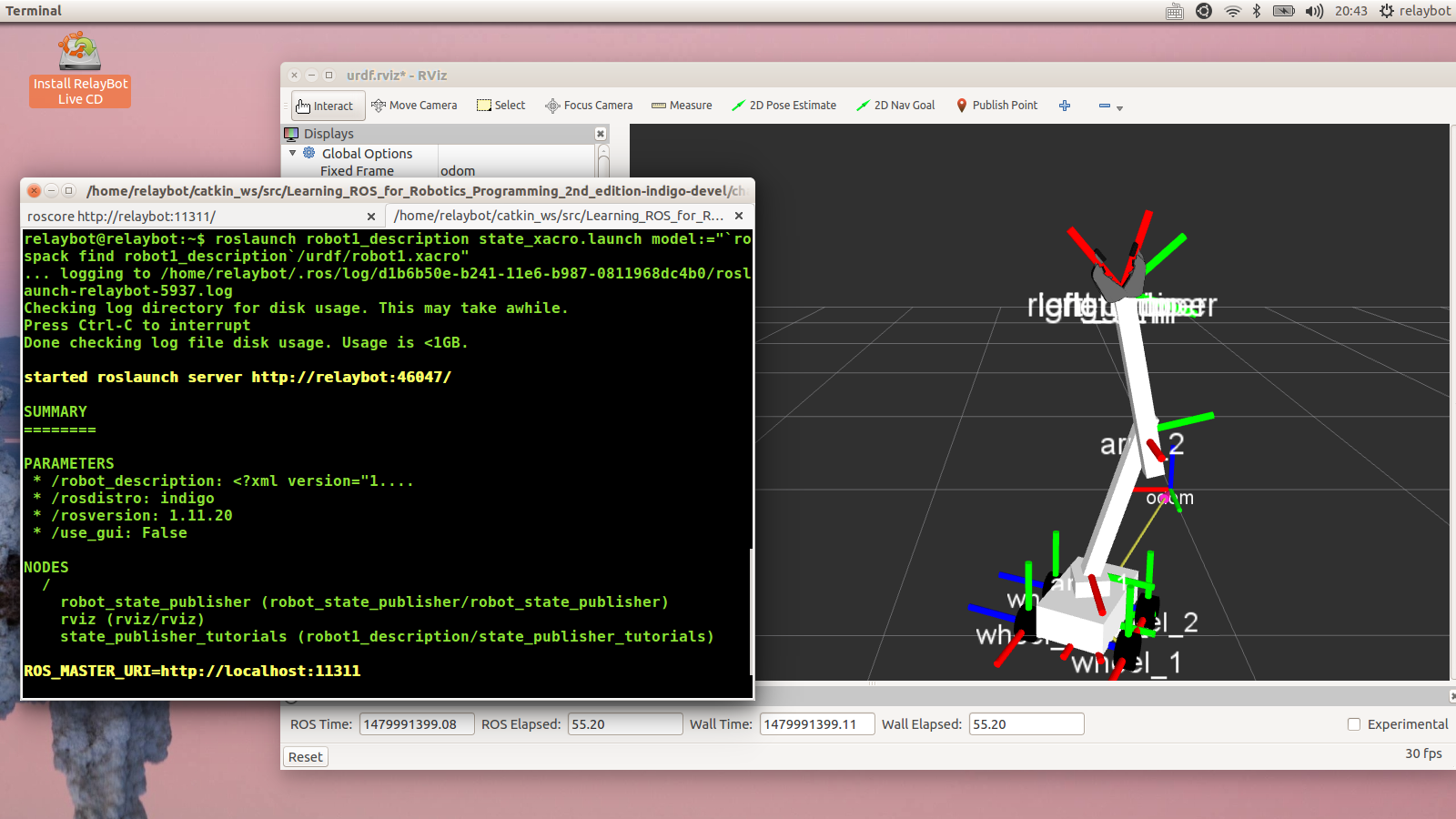
第7章204页:
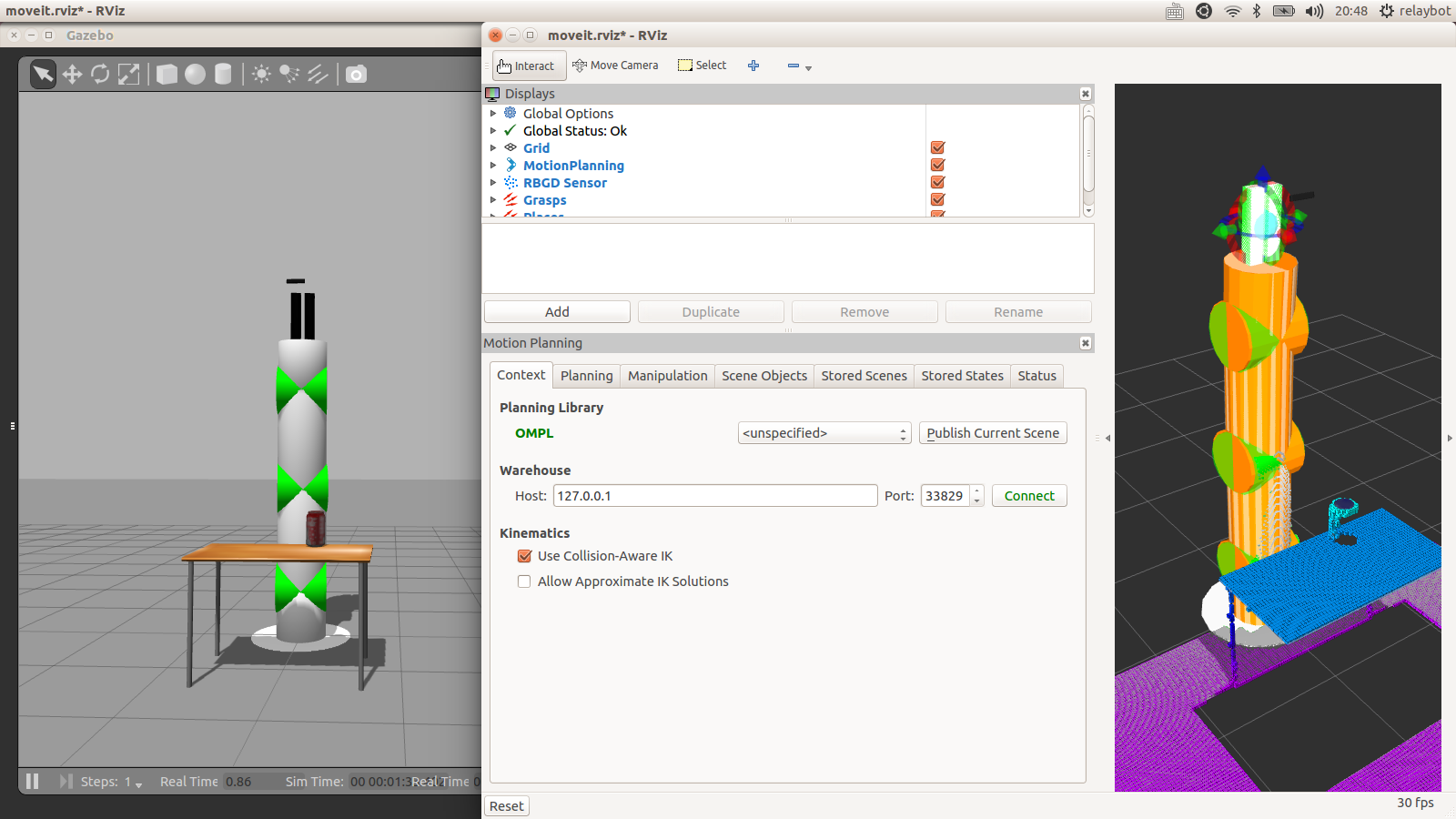
第10章287页:
rbx1和rbx2示例不介绍了。