https://blog.csdn.net/np4rHI455vg29y2/article/details/78954871
根据牛顿第三定律,旋翼在旋转的同时,也会同时向电机施加一个反作用力(反扭矩),促使电机向反方向旋转。这也是为什么现在的直升机都会带一个「小尾巴」,在水平方向上施加一个力,去抵消这种反作用力,保持直升机机身的稳定。
而回到四旋翼飞行器上,它的螺旋桨也会产生这样的力,所以为了避免飞机疯狂自旋,四旋翼飞机的四个螺旋桨中,相邻的两个螺旋桨旋转方向是相反的。
如下图所示,三角形红箭头表示飞机的机头朝向,螺旋桨M1、M3的旋转方向为逆时针,螺旋桨M2、M4的旋转方向为顺时针。
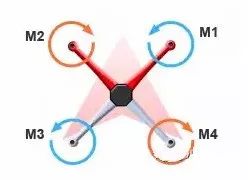
当飞行时,M2、M4所产生的逆时针反作用力(反扭矩)和M1、M3产生的顺时针反作用力(反扭矩)相抵消,飞机机身就可以保持稳定,不会疯狂自转了。
不仅如此,多轴飞机的前后左右或是旋转飞行的也都是靠多个螺旋桨的转速控制来实现的:
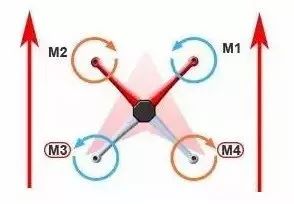
垂直升降
这个很好理解,当飞机需要升高高度时,四个螺旋桨同时加速旋转,升力加大,飞机就会上升。当飞机需要降低高度时同理,四个螺旋桨会同时降低转速,飞机也就下降了。
之所以强调同时,是因为保持多个旋翼转速的相对稳定,对保持飞行器机身姿态来说非常重要,看了之后的讲究你就会明白了~
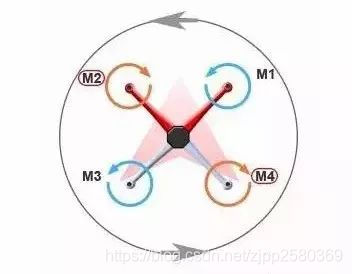
原地旋转
上面已经说了,当无人机各个电机转速相同,飞机的反扭矩被抵消,不会发生转动。
但是当要飞机原地旋转时,我们就可以利用这种反扭矩,M2、M4两个顺时针旋转的电机转速增加,M1、M3号两个逆时针旋转的电机转速降低,由于反扭矩影响,飞机就会产生逆时针方向的旋转
水平移动
多轴飞机与我们平时乘坐的客机不同,没有类似客机那样垂直于地面的螺旋桨,所以无法直接产生水平方向上的力来进行水平方向上移动。
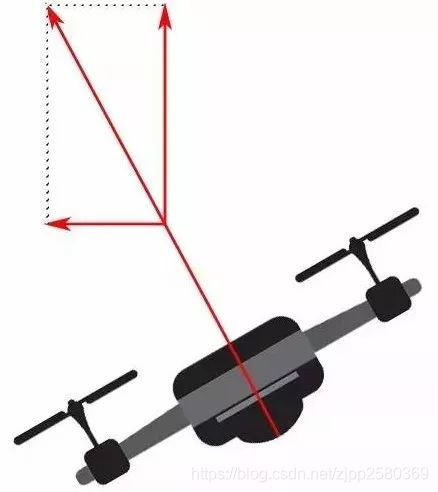
当然这难不倒我们,还拿上图的四旋翼来说,当需要按照三角箭头方向前进时,M3、M4电机螺旋桨会提高转速,同时M1、M2电机螺旋桨降低转速,由于飞机后部的升力大于飞机前部,飞机的姿态会向前倾斜。
倾斜时的侧面平视如下图,这时螺旋桨产生的升力除了在竖直方向上抵消飞机重力外,还在水平方向上有一个分力,这个分力就让飞机有了水平方向上的加速度,飞机也因而能向前飞行。
遥控器的摇杆布局有三种,中国手(反美国手),美国手(多旋翼最常用),日本手。



俯仰:pitch
多轴飞行器俯仰时只会前后飞行
横滚:roll
多轴飞行器横滚时会左右飞行
航向:yaw
多轴飞行器旋转时不会位置,指挥原地旋转