首页
移动开发
物联网
服务端
编程语言
企业开发
数据库
业界资讯
其他
搜索
四旋翼无人机PID控制
其他
2018-05-27 19:30:25
阅读次数: 0
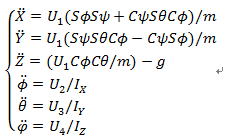
一、建立四旋翼无人机动力学方程
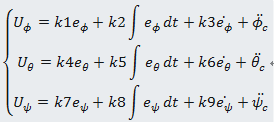
二、确定PID控制律
1、姿态控制回路
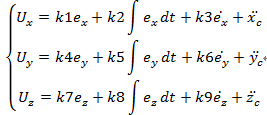
2、位置控制回路
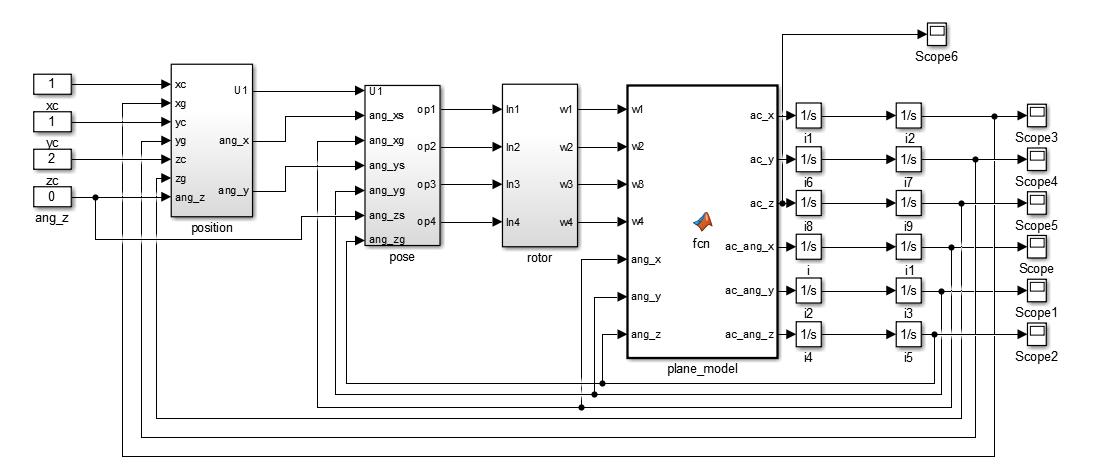
3、仿真图
猜你喜欢
转载自
blog.csdn.net/wangzheweini/article/details/78813942
四旋翼无人机PID控制
m基于PID控制算法的四旋翼无人机飞行控制simulink仿真
【rotors】多旋翼无人机仿真(四)——参数补偿和PID控制
四旋翼无人机从0到1的实现(二十五)无人机工程中PID
【无人机】【2014.12】基于区域覆盖的四旋翼无人机最优路径规划与控制
四旋翼无人机的几何跟踪控制matlab源码
四旋翼无人机的设计与实现讲解
四旋翼无人机设计
“四旋翼”无人机“X模式”飞行原理
四旋翼无人机开发目录
四旋翼无人机使用教程
11.基于STM32C8T6的四旋翼无人机的飞控制作----PID调试方法
多旋翼无人机原理::
4.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备4,四旋翼姿态控制理论
3.基于STM32C8T6的四旋翼无人机的飞控制作----理论准备3,四旋翼姿态控制理论
四旋翼无人机从0到1的实现(二十四)无人机工程中系统控制
m基于内外环PD控制算法的四旋翼无人机飞行控制simulink仿真
技术专栏|多旋翼无人机PID调节经验分享
四旋翼无人机从0到1的实现(十二)无人机外设驱动→MOTOR
四旋翼无人机从0到1的实现(二十二)无人机工程中滤波
四旋翼无人机从0到1的实现(二十)无人机MCU驱动→SYSTICK
四旋翼无人机从0到1的实现(十九)无人机MCU驱动→ADC
四旋翼无人机从0到1的实现(十八)无人机外设驱动→MPU6500
四旋翼无人机从0到1的实现(十七)无人机外设驱动→LED
四旋翼无人机从0到1的实现(十六)无人机MCU驱动→GPIO
四旋翼无人机从0到1的实现(十五)无人机外设驱动→Receiver
四旋翼无人机从0到1的实现(十四)无人机MCU驱动→UART
四旋翼无人机从0到1的实现(十三)无人机MCU驱动→I2C
笔记:四旋翼无人机从0到1的实现(十一)无人机MCU驱动→PWM
【rotors】多旋翼无人机仿真(三)——SE3控制
今日推荐
Arc Browser for Windows 1.0 正式 GA
90后程序员开发视频搬运软件、不到一年获利超 700 万,结局很刑!
《美国对全球网络空间安全与发展的威胁和破坏》报告发布
火速冲上 GitHub 热榜 —— 开源编程语言、框架哪有这么可爱?
北京人形机器人创新中心发布全球首个纯电驱拟人奔跑的全尺寸人形机器人“天工”
周排行
rbac——界面、权限
Apache CXF + SpringMVC 整合发布WebService
so插件化
Vue.js实战系列---图标字体制作(svg格式)
PAT乙级 1007 素数对猜想(孪生素数对) (20分) ---(C语言 + 详细注释)
被IRM保护的文档,打开失败
Calendar和Date计算日期差的小问题
win10子系统ubuntu18.4安装docker
利用Wrap Shell Script定位Android Native内存泄漏
MySQL: Transaction (Part I - Basic Concept)
每日归档
更多
2024-05-03(19)
2024-05-02(0)
2024-05-01(4)
2024-04-30(1)
2024-04-29(40)
2024-04-28(0)
2024-04-27(56)
2024-04-26(39)
2024-04-25(22)
2024-04-24(36)