目录
1.算法仿真效果
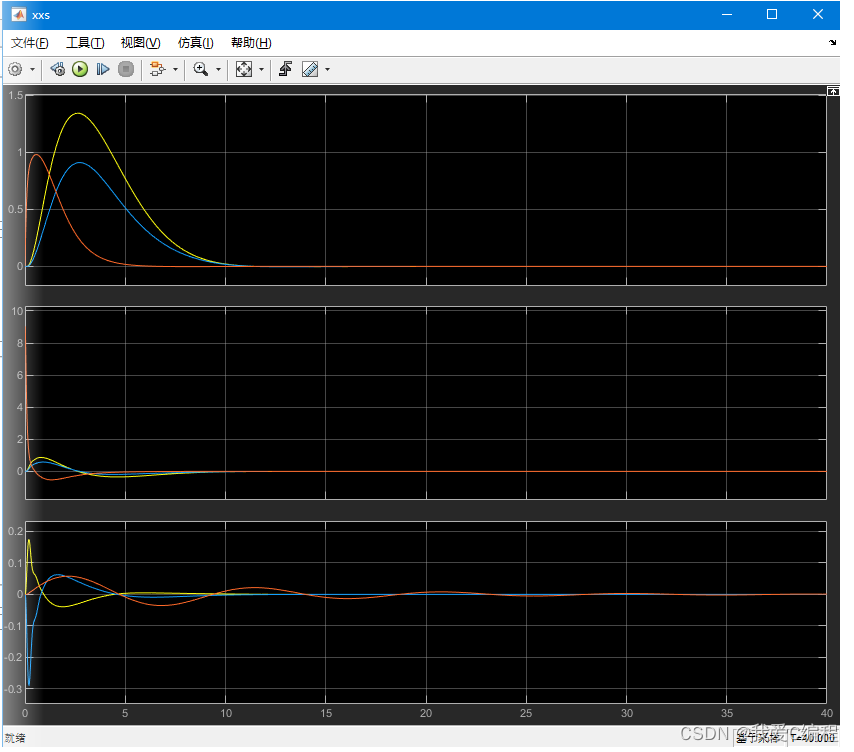
matlab2022a仿真结果如下:
2.算法涉及理论知识概要
随着无人飞行器技术的不断发展,其在各个领域有着越来越多的应用,如商业领域通过无人机进行物件派送,在农业领域通过无人机进行农作物的监控,在军事领域通过无人机进行敌情监控等。无人机相对于载人飞机而言,最大的区别是其无人驾驶和自动飞行功能,由于飞行器省去了飞行员的质量,因此其质量较轻,可以充分利用空气动力来抵消大部分自身重量。
四旋翼飞行器由于其飞行动力来自四个相互独立的电机,因此四旋翼飞行器也被称为四轴飞行器。通过四个电机可以快速实现四旋翼飞行器的起降,任意高度的控制悬停,翻滚飞行以及小曲率转弯等飞行功能。图给出了四旋翼飞行器的实物图和数学模型简化图。
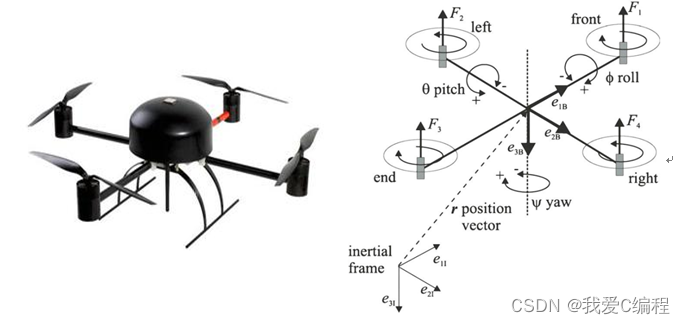
四旋翼飞行器的四个电机为十字型等间隔分布。其中第一个电机和第三个电机选择方向为顺时针旋转,第二个电机和第四个电机选择方向为逆时针旋转。通过这四个电机可以给四旋翼飞行器产生四个上升动力,此外也可以通过改变四个电机的旋转速度,是的无人机产生各种不同的飞行动作。如果要保证四旋翼飞行器的飞行状态为悬停状态,那么只要保证四个电机的选择速度相同,且保证四个电机产生的动力和飞行器自身的重力相同就可以实现;如果四个电机产生的动力大于飞行器自身的重量,那么飞行器将上升;如果四个电机产生的动力小于飞行器自身的重量,那么飞行器将下降。如果其中2个电机产生的动力较大,2个电机产生的动力较小,那么飞行器将出现角度切斜的飞行状态。

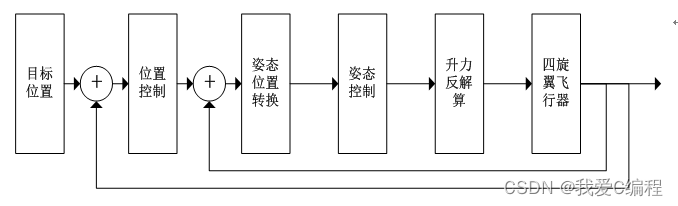
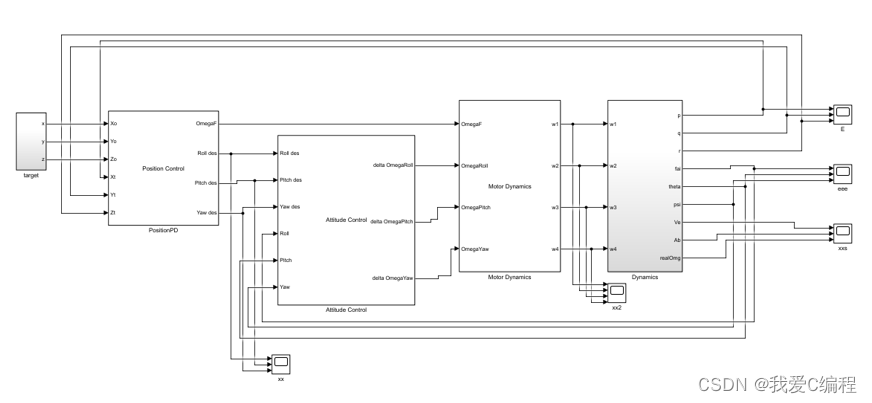
一种基于内外环的四旋翼飞行器的PD控制系统,将四旋翼飞行器的位置控制系统作为外环控制环节,将四旋翼飞行器的姿态控制系统作为内环控制环节。下面对该控制系统的基本原理和实现方式进行介绍,基于内外环的四旋翼飞行器的PD控制的基本结构如下图所示:
四旋翼飞行器是无人机中较为常用的一个机种,其具有垂直起飞和降落的功能,其可以在各种复杂地形中进行飞行和起降,随着无人飞行器技术的不断发展,四旋翼飞行器有着越来越多的应用,如农业,商业,军事等多个领域。相对于传统的固定翼飞行器,四旋翼飞行器具有诸多优势,其可靠性较高,机动性较高,使用成本较低。四旋翼飞行器是一种非线性极强的系统。其涉及了多个学科的新的研究领域,包括物理、机械、数学、电力电子、控制算法、传感器、无线通信、数字图像采集等多个领域。
PID控制器是一种应用及其广发的控制系统,其包括比例控制器,微分控制器以及积分控制三个部分构成,然后通过MATLAB仿真分析了PID控制器中比例参数,微分参数以及积分参数对控制器的影响。当控制反馈误差较大的时候,可以逐渐增加比例参数,适度的减少微分控制参数,并将积分控制可以设置一个较小值甚至为零。当控制反馈误差适中的时候,设置较小的比例参数,同时适当的增加积分参数。当控制反馈误差较小的时候,此时需要设置较大的比例系数和积分系数,并且根据系统的稳定性情况,合理设置微分控制参数。最后介绍了一种基于内外环PD控制器的的四旋翼飞行器控制系统,该控制系统包括位置控制模块,姿态位置转换模块,姿态控制模块,升力反解计算模块以及四旋翼飞行器模块。
3.MATLAB核心程序
........................................................
SEL = 3;
if SEL == 1
load data.mat
time11 = A.time;
Roll_des1 = A.signals(1).values;
Pitch_des1 = A.signals(2).values;
Yaw_des1 = A.signals(3).values;
load data0.mat
time10 = A.time;
Roll_des0 = A.signals(1).values;
Pitch_des0 = A.signals(2).values;
Yaw_des0 = A.signals(3).values;
figure;
plot(time10(1:10:end),Roll_des0(1:10:end),'b','linewidth',2);
hold on
plot(time11,Roll_des1,'r','linewidth',2);
xlabel('times');
ylabel('Roll');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot(time10(1:10:end),Pitch_des0(1:10:end),'b','linewidth',2);
hold on
plot(time11,Pitch_des1,'r','linewidth',2);
xlabel('times');
ylabel('Pitch');
legend('PID控制器','内外环PD控制器');
grid on
end
if SEL == 3
load data.mat
time1 = E.time;
x1 = E.signals(1).values;
y1 = E.signals(2).values;
z1 = E.signals(3).values;
load data0.mat
time0 = E.time;
x0 = E.signals(1).values;
y0 = E.signals(2).values;
z0 = E.signals(3).values;
figure;
plot(time0(1:10:end),x0(1:10:end),'b','linewidth',2);
hold on
plot(time1,x1,'r','linewidth',2);
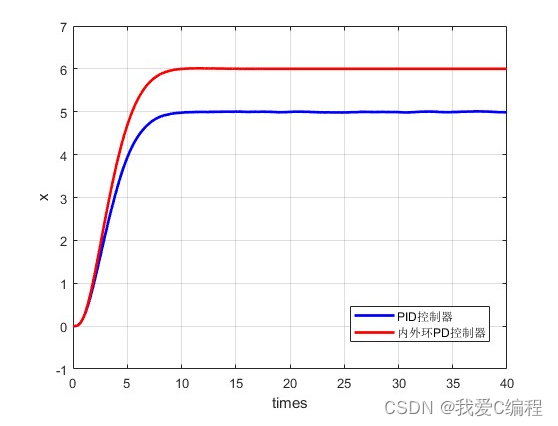
xlabel('times');
ylabel('x');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot(time0(1:10:end),y0(1:10:end),'b','linewidth',2);
hold on
plot(time1,y1,'r','linewidth',2);
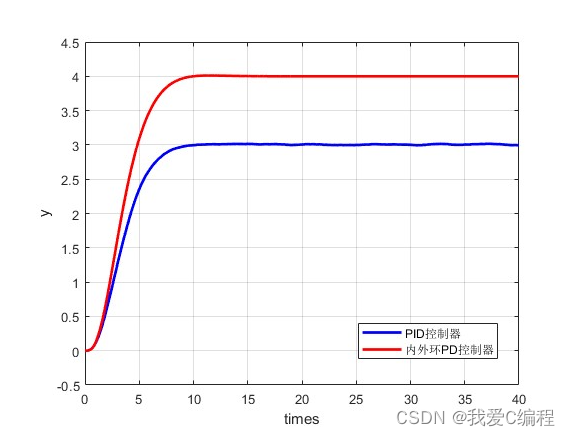
xlabel('times');
ylabel('y');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot(time0(1:10:end),z0(1:10:end),'b','linewidth',2);
hold on
plot(time1,z1,'r','linewidth',2);
xlabel('times');
ylabel('z');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot3(x0,y0,z0,'b','linewidth',2);
hold on
plot3(x1,y1,z1,'r','linewidth',2);
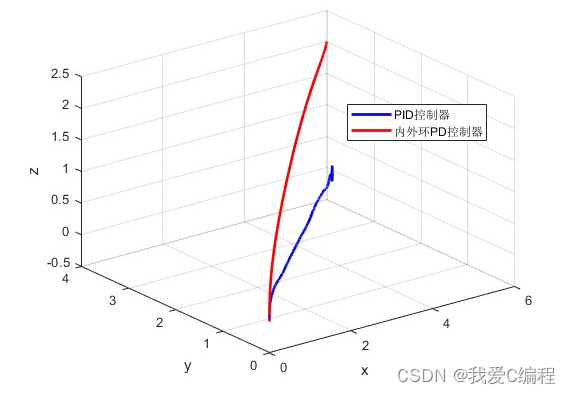
legend('PID控制器','内外环PD控制器');
xlabel('x');
ylabel('y');
zlabel('z');
grid on
end
if SEL ==2
load data0.mat
time0 = F.time;
fai0 = F.signals(1).values;
theta0 = F.signals(2).values;
psi0 = F.signals(3).values;
load data.mat
time1 = F.time;
fai1 = F.signals(1).values;
theta1 = F.signals(2).values;
psi1 = F.signals(3).values;
figure;
plot(time0(1:10:end),fai0(1:10:end),'b','linewidth',2);
hold on
plot(time1,fai1,'r','linewidth',2);
xlabel('times');
ylabel('横滚角');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot(time0(1:10:end),theta0(1:10:end),'b','linewidth',2);
hold on
plot(time1,theta1,'r','linewidth',2);
xlabel('times');
ylabel('俯仰角');
legend('PID控制器','内外环PD控制器');
grid on
figure;
plot(time0(1:10:end),psi0(1:10:end),'b','linewidth',2);
hold on
plot(time1,psi1,'r','linewidth',2);
legend('PID控制器','内外环PD控制器');
xlabel('times');
ylabel('偏航角');
grid on
end
08_081_m
4.完整算法代码文件
V