本文为美国托莱多大学(作者:Jiankun Fan)的硕士论文,共90页。
无人机(UAV)是一种没有人驾驶的飞机。它的飞行要么由车上的计算机自主控制,要么由地面飞行员远程控制,要么由另一辆车远程控制。近年来,无人机的使用比以往更为普遍。本示例包括areo相机,其中高速相机连接到无人机上,可通过机载相机来获取空中视频。还可用于探测地面事件,以执行监视等任务,这是战争期间的一项常见任务。类似地,当常规通信基础设施遭到破坏时,无人机也可用于中继通信。
本文的研究目标是从诸如搜救或野火探测与监测等民用行动中获得的,其中一种情况是搜索和救援,无人机的目标是在给定区域对人员进行地理定位。这项任务是在一台摄像机的帮助下完成的,摄像机向搜救人员提供实时信息。为此,无人机需要在最短时间内对整个区域进行扫描。本文的目的是开发一种算法,使无人机能够在最佳时间扫描一个区域,在文献中称为“覆盖控制”问题。本文研究的是一种特殊的无人机,称为“四旋翼”无人机。本文的总体目标是通过解决两个问题来实现的。第一个问题是建立四旋翼的动态控制模型。本文在MATLAB的Simulink上开发并实现了一种基于比例积微分控制器(PID)的反馈控制系统。PID控制器有助于跟踪任何给定的轨迹。第二个问题是设计完成目标任务的轨迹。设计的轨迹应该确保四旋翼机能够扫描整个区域而不遗漏任何部分,以确保四旋翼机能够在该区域找到丢失的人员,由此生成的轨迹也应该是最优的。这是通过对轨迹形式进行一些假设,采用求解优化问题来获得最优轨迹参数来实现的。最后通过大量的仿真验证了所提出的技术。
An Unmanned Aerial Vehicle (UAV) is anaircraft without a human pilot on board. Its flight is controlled eitherautonomously by computers onboard the vehicle, or remotely by a pilot on theground, or by another vehicle. In recent years, UAVs have been used morecommonly than prior years. The example includes areo-camera where a high speedcamera was attached to a UAV which can be used as an airborne camera to obtainaerial video. It also could be used for detecting events on ground for taskssuch as surveillance and monitoring which is a common task during wars. SimilarlyUAVs can be used for relaying communication signal during scenarios whenregular communication infrastructure is destroyed. The objective of this thesisis motivated from such civilian operations such as search and rescue orwildfire detection and monitoring. One scenario is that of search and rescuewhere UAV’s objective is to geo-locate a person in a given area. The task iscarried out with the help of a camera whose live feed is provided to search andrescue personnel. For this objective, the UAV needs to carry out scanning ofthe entire area in the shortest time. The aim of this thesis to developalgorithms to enable a UAV to scan an area in optimal time, a problem referredto as “Coverage Control” in literature. The thesis focuses on a special kind ofUAVs called “quadrotor” that is propelled with the help of four rotors. Theoverall objective of this thesis is achieved via solving two problems. Thefirst problem is to develop a dynamic control model of quadrtor. In thisthesis, a proportionalintegral-derivative controller (PID) based feedbackcontrol system is developed and implemented on MATLAB’s Simulink. The PIDcontroller helps track any given trajectory. The second problem is to design atrajectory that will fulfill the mission. The planed trajectory should makesure the quadrotor will scan the whole area without missing any part to makesure that the quadrotor will find the lost person in the area. The generatedtrajectory should also be optimal. This is achieved via making some assumptionson the form of the trajectory and solving the optimization problem to obtainoptimal parameters of the trajectory. The proposed techniques are validatedwith the help of numerous simulations.
- 引言
- 文献回顾
- 问题描述
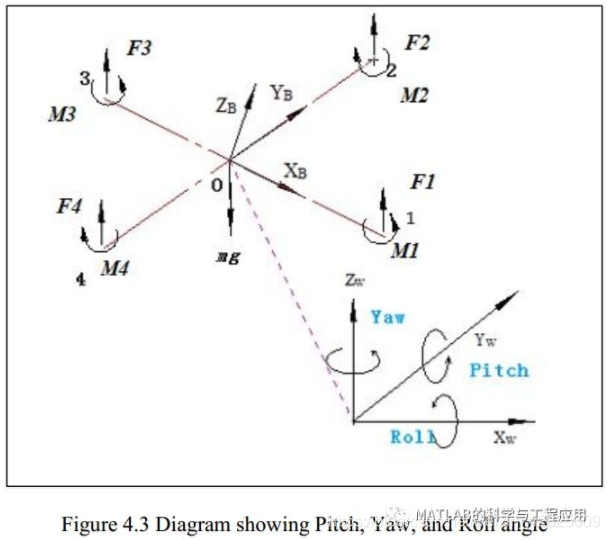
- 四旋翼无人机的动态与控制模型
- 轨迹设计与优化
- 结论与未来工作展望
附录A 动态模型参数
附录B 系统动态仿真
更多精彩文章请关注公众号:
