本系列是基于pixhawk平台的px4固件而进行的
实验准备
1.一台pixhawk2.4.8的无人机
2.一台个人电脑
实验过程
使用QGroundControl给无人机刷固件
一、百度搜索QGC,下载qgc安装包,进行安装。
二、使用microUSB接口的数据线连接个人电脑,给无人机刷px4固件。
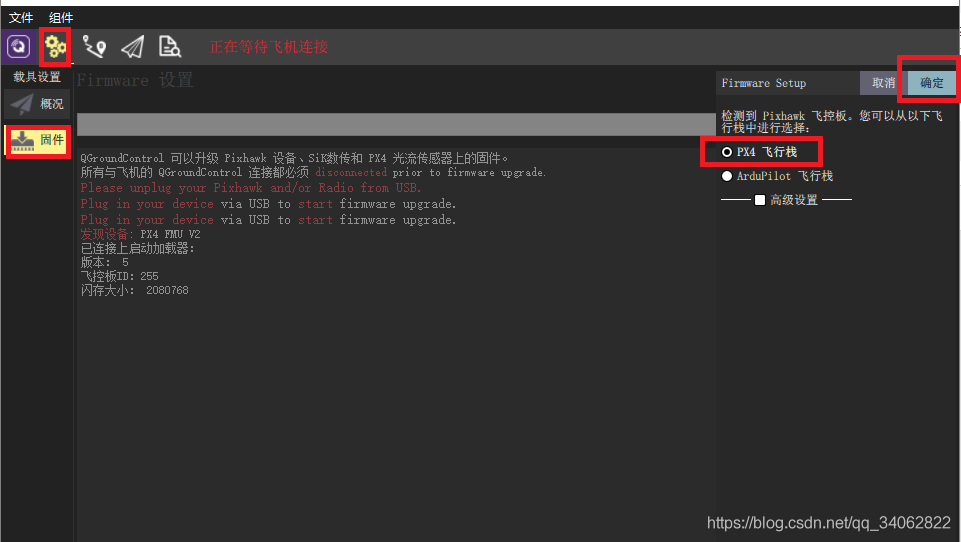
刷完固件之后可以看到固件的版本(此处为1.8.2)
三、无人机的机架选择、传感器校准、遥控的校准、飞行模式选择、电调、参数。
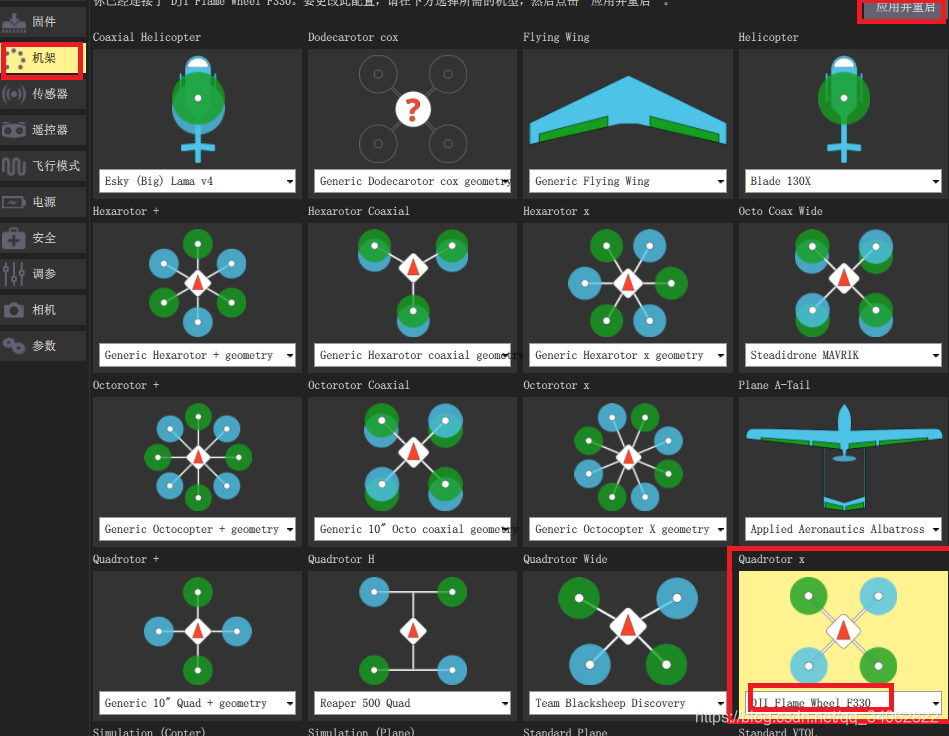
1.机型选择,此处的无人机为f330的四旋翼无人机,设置好之后点击右上角应用并重启。
2.传感器校准
根据提示,摆放无人机的位置,进行校准。
磁罗盘:分别沿着无人机的6个面的法线旋转无人机
陀螺仪:在平面上静置无人机
加速度计:和磁罗盘类似(不用旋转),以6个面分别置于水平面上,静置
地平线:将飞机置于平飞位置

此处无人机已经完成校准,显示为绿色。
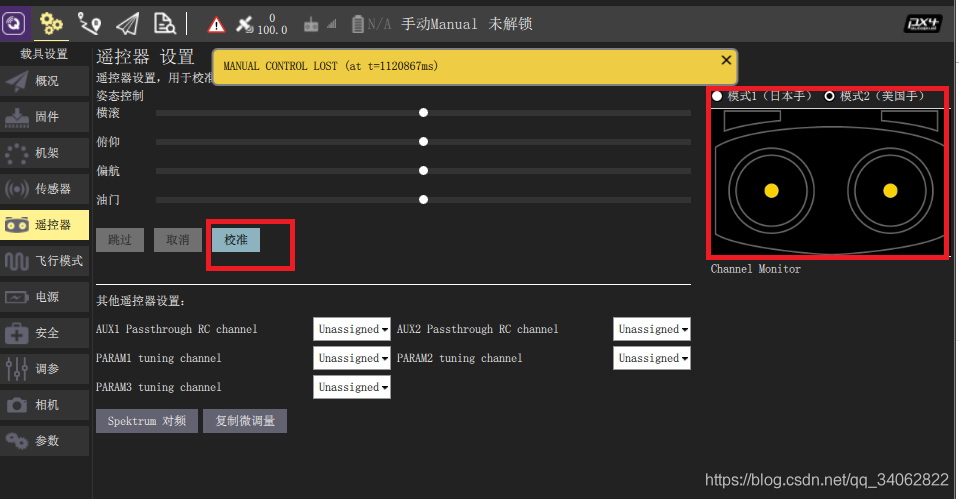
3.遥控器校准。
美国手和日本手分别表示正反手控制,美国手为:左手油门。
点击校准之后,根据右边红框内的摇杆的位置,操作手中遥控的摇杆,使其与地面站上的位置相同。多次操作之后完成校准。
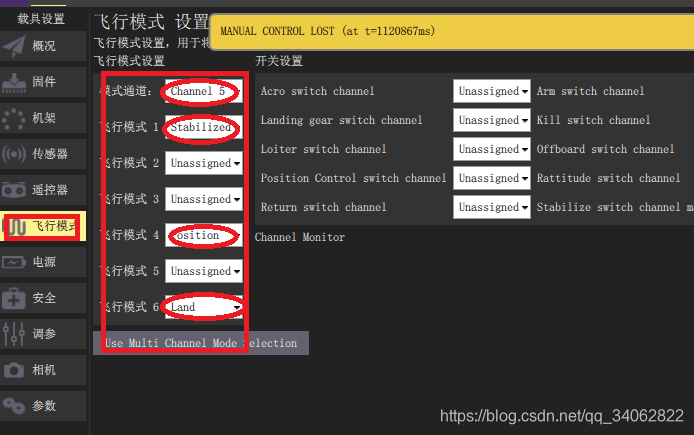
4.飞行模式
通常以通道5控制无人机飞行模式,通道5的操作杆有三个档位,上中下与1.4.6对应。根据需求可进行设置。
5.电调及参数
根据电池的属性设置电调,通常无人机的电池的芯数为3,一般不用修改。
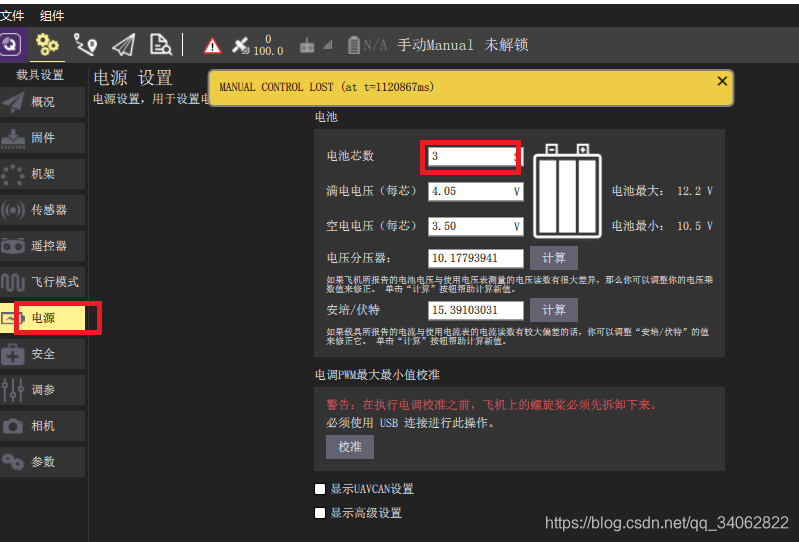
后面的参数,主要用于飞行器飞行时的pid调试,其余的一般默认即可。
使用遥控控制飞行
首先,将无人机与电脑连接的usb断开,接上电池;将遥控的左边摇杆(美国手)拉到右下方,让电机解锁。
然后可以通过操作摇杆、切换通道控制无人机飞行了。
无人机落地后,首先需要将左手摇杆拉到左下方,给电机加锁。