Hadoop HA
Hadoop 系统架构
保持主和备NameNode的状态同步,并让Standby在Active挂掉后迅速提供服务。
Hadoop1.x和Hadoop2.x 架构
Hadoop 1.x之前,其官方架构如图所示:
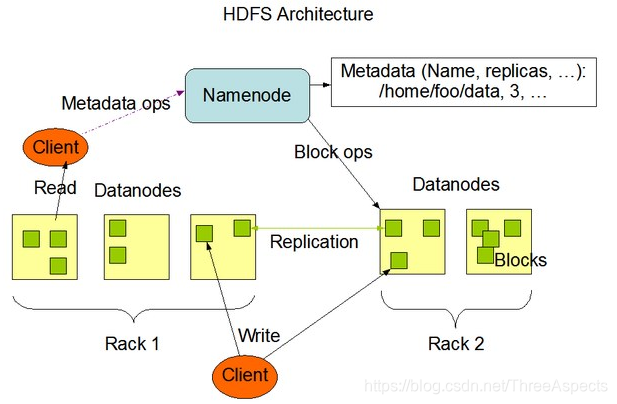
从图中可看出,1.x版本之前只有一个Namenode,所有元数据由唯一的Namenode负责管理,当这个NameNode挂掉时整个集群基本也就不可用。Hadoop 2.x的架构如图所示:
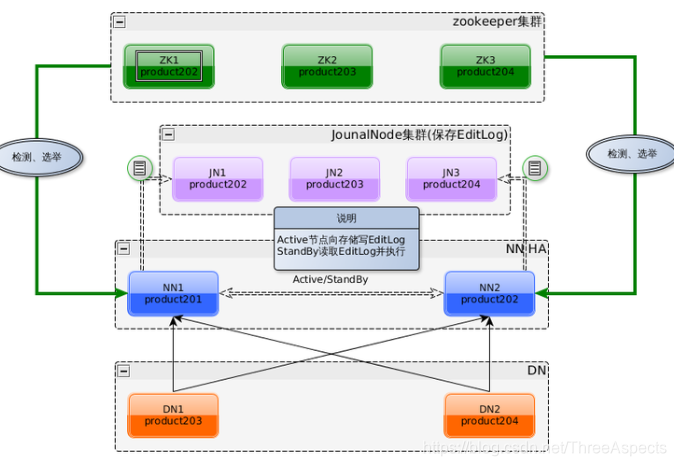
2.x版本中,HDFS架构解决了单点故障问题,即引入双NameNode架构,同时借助共享存储系统来进行元数据的同步,这里Quorum Journal Manager(QJM)作为共享存储组件,通过搭建奇数结点的JournalNode实现主备NameNode元数据操作信息同步。
Hadoop的元数据主要作用是维护HDFS文件系统中文件和目录相关信息。元数据的存储形式主要有3类:内存镜像、磁盘镜像(FSImage)、日志(EditLog)。在Namenode启动时,会加载磁盘镜像到内存中以进行元数据的管理,存储在NameNode内存;磁盘镜像是某一时刻HDFS的元数据信息的快照,包含所有相关Datanode节点文件块映射关系和命名空间(Namespace)信息,存储在NameNode本地文件系统;日志文件记录client发起的每一次操作信息,即保存所有对文件系统的修改操作,用于定期和磁盘镜像合并成最新镜像,保证NameNode元数据信息的完整,存储在NameNode本地和共享存储系统(QJM)中。
如下所示为NameNode本地的EditLog和FSImage文件格式,EditLog文件有两种状态: inprocess和finalized, inprocess表示正在写的日志文件,文件名形式:editsinprocess[start-txid],finalized表示已经写完的日志文件,文件名形式:edits[start-txid][end-txid]; FSImage文件也有两种状态, finalized和checkpoint, finalized表示已经持久化磁盘的文件,文件名形式: fsimage_[end-txid], checkpoint表示合并中的fsimage, 2.x版本checkpoint过程在Standby Namenode(SNN)上进行,SNN会定期将本地FSImage和从QJM上拉回的ANN的EditLog进行合并,合并完后再通过RPC传回ANN。
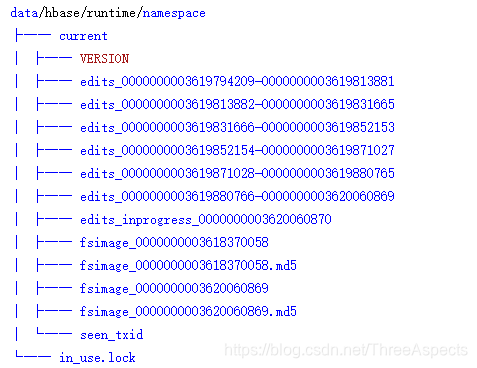
上面所示的还有一个很重要的文件就是seen_txid,保存的是一个事务ID,这个事务ID是EditLog最新的一个结束事务id,当NameNode重启时,会顺序遍历从edits_0000000000000000001到seen_txid所记录的txid所在的日志文件,进行元数据恢复,如果该文件丢失或记录的事务ID有问题,会造成数据块信息的丢失。
HA其本质上就是要保证主备NN元数据是保持一致的,即保证fsimage和editlog在备NN上也是完整的。
QJM原理
QJM原理
QJM全称是Quorum Journal Manager,由JournalNode组成,一般是奇数点结点组成。每个JournalNode对外有一个简易的RPC接口,以供NameNode读写EditLog到JournalNode本地磁盘。当写EditLog时,NameNode会同时向所有JournalNode并行写文件,只要有N/2+1结点写成功则认为此次写操作成功,遵循Paxos协议。其内部实现框架如下:
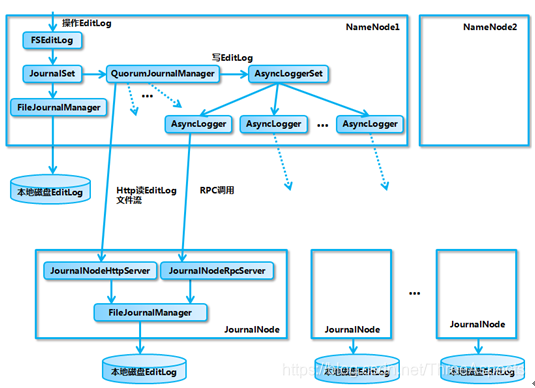
从图中可看出,主要是涉及EditLog的不同管理对象和输出流对象,每种对象发挥着各自不同作用:
- FSEditLog:所有EditLog操作的入口
- JournalSet: 集成本地磁盘和JournalNode集群上EditLog的相关操作
- FileJournalManager: 实现本地磁盘上 EditLog 操作
- QuorumJournalManager: 实现JournalNode 集群EditLog操作
- AsyncLoggerSet: 实现JournalNode 集群 EditLog 的写操作集合
- AsyncLogger:发起RPC请求到JN,执行具体的日志同步功能
- JournalNodeRpcServer:运行在 JournalNode 节点进程中的 RPC 服务,接收 NameNode 端的 AsyncLogger 的 RPC 请求
- JournalNodeHttpServer:运行在 JournalNode 节点进程中的 Http 服务,用于接收处于 Standby 状态的 NameNode 和其它 JournalNode 的同步 EditLog 文件流的请求。
QJM 写过程分析
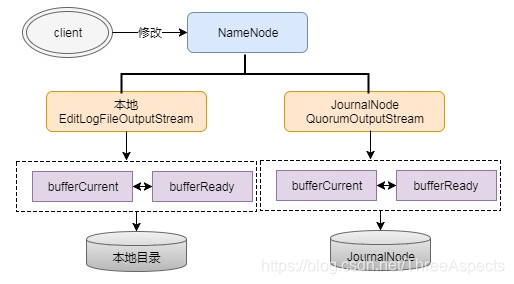
NameNode会把EditLog同时写到本地和JournalNode。写本地由配置中参数dfs.namenode.name.dir控制,写JN由参数dfs.namenode.shared.edits.dir控制,在写EditLog时会由两个不同的输出流来控制日志的写过程,分别为:EditLogFileOutputStream(本地输出流)和QuorumOutputStream(JN输出流)。写EditLog也不是直接写到磁盘中,为保证高吞吐,NameNode会分别为EditLogFileOutputStream和QuorumOutputStream定义两个同等大小的Buffer,大小大概是512KB,一个写Buffer(buffCurrent),一个同步Buffer(buffReady),这样可以一边写一边同步,所以EditLog是一个异步写过程,同时也是一个批量同步的过程,避免每写一笔就同步一次日志。
实现边写边同步通过一个缓冲区交换的过程实现,即bufferCurrent和buffReady在达到条件时会触发交换,如bufferCurrent在达到阈值同时bufferReady的数据又同步完时,bufferReady数据会清空,同时会将bufferCurrent指针指向bufferReady以满足继续写,另外会将bufferReady指针指向bufferCurrent以提供继续同步EditLog。上面过程用流程图就是表示如下:
这里有一个问题,既然EditLog是异步写的,怎么保证缓存中的数据不丢呢,其实这里虽然是异步,但实际所有日志都需要通过logSync同步成功后才会给client返回成功码,假设某一时刻NameNode不可用了,其内存中的数据其实是未同步成功的,所以client会认为这部分数据未写成功。第二个问题是,EditLog如何在多个JN上保持一致?
1.隔离双写:
在ANN每次同步EditLog到JN时,先要保证不会有两个NN同时向JN同步日志。这个隔离是怎么做的。这里面涉及一个很重要的概念Epoch Numbers,很多分布式系统都会用到。Epoch有如下几个特性:
- 当NN成为活动结点时,其会被赋予一个EpochNumber
- 每个EpochNumber是惟一的,不会有相同的EpochNumber出现
- EpochNumber有严格顺序保证,每次NN切换后其EpochNumber都会自增1,后面生成的EpochNumber都会大于前面的EpochNumber
QJM是怎么保证上面特性的呢,主要有以下几点:
- 第一步,在对EditLog作任何修改前,QuorumJournalManager(NameNode上)必须被赋予一个EpochNumber
- 第二步, QJM把自己的EpochNumber通过newEpoch(N)的方式发送给所有JN结点
- 第三步, 当JN收到newEpoch请求后,会把QJM的EpochNumber保存到一个lastPromisedEpoch变量中并持久化到本地磁盘
- 第四步, ANN同步日志到JN的任何RPC请求(如logEdits(),startLogSegment()等),都必须包含ANN的EpochNumber
- 第五步,JN在收到RPC请求后,会将之与lastPromisedEpoch对比,如果请求的EpochNumber小于lastPromisedEpoch,将会拒绝同步请求,反之,会接受同步请求并将请求的EpochNumber保存在lastPromisedEpoch
这样就能保证主备NN发生切换时,就算同时向JN同步日志,也能保证日志不会写乱,因为发生切换后,原ANN的EpochNumber肯定是小于新ANN的EpochNumber,所以原ANN向JN的发起的所有同步请求都会拒绝,实现隔离功能,防止了脑裂。
2. 恢复in-process日志
如果在写过程中写失败了,可能各个JN上的EditLog的长度都不一样,需要在开始写之前将不一致的部分恢复。恢复机制如下:
1、ANN先向所有JN发送getJournalState请求
2、JN会向ANN返回一个Epoch(lastPromisedEpoch)
3、ANN收到大多数JN的Epoch后,选择最大的一个并加1作为当前新的Epoch,然后向JN发送新的newEpoch请求,把新的Epoch下发给JN
4、JN收到新的Epoch后,和lastPromisedEpoch对比,若更大则更新到本地并返回给ANN自己本地一个最新EditLogSegment起始事务Id,若小则返回NN错误
5、ANN收到多数JN成功响应后认为Epoch生成成功,开始准备日志恢复
6、ANN会选择一个最大的EditLogSegment事务ID作为恢复依据,然后向JN发送prepareRecovery; RPC请求,对应Paxos协议2p阶段的Phase1a,若多数JN响应prepareRecovery成功,则可认为Phase1a阶段成功
7、ANN选择进行同步的数据源,向JN发送acceptRecovery RPC请求,并将数据源作为参数传给JN
8、JN收到acceptRecovery请求后,会从JournalNodeHttpServer下载EditLogSegment并替换到本地保存的EditLogSegment,对应Paxos协议2p阶段的Phase1b,完成后返回ANN请求成功状态
9、ANN收到多数JN的响应成功请求后,向JN发送finalizeLogSegment请求,表示数据恢复完成,这样之后所有JN上的日志就能保持一致
数据恢复后,ANN上会将本地处于in-process状态的日志更名为finalized状态的日志,形式如edits[start-txid][stop-txid]
3.日志同步
日志从ANN同步到JN的过程:
- 执行logSync过程,将ANN上的日志数据放到缓存队列中
- 将缓存中数据同步到JN,JN有相应线程来处理logEdits请求
- JN收到数据后,先确认EpochNumber是否合法,再验证日志事务ID是否正常,将日志刷到磁盘,返回ANN成功码
- ANN收到JN成功请求后返回client写成功标识,若失败则抛出异常
通过上面一些步骤,日志能保证成功同步到JN,同时保证JN日志的一致性,进而备NN上同步日志时也能保证数据是完整和一致的。
QJM读过程分析
读过程是面向备NN(SNN)的,SNN定期检查JournalNode上EditLog的变化,然后将EditLog拉回本地。SNN上有一个线程StandbyCheckpointer,会定期将SNN上FSImage和EditLog合并,并将合并完的FSImage文件传回主NN(ANN)上,即Checkpointing过程。。
在2.x版本中,已经将原来的由SecondaryNameNode主导的Checkpointing替换成由SNN主导的Checkpointing。下面是一个CheckPoint的流向图:
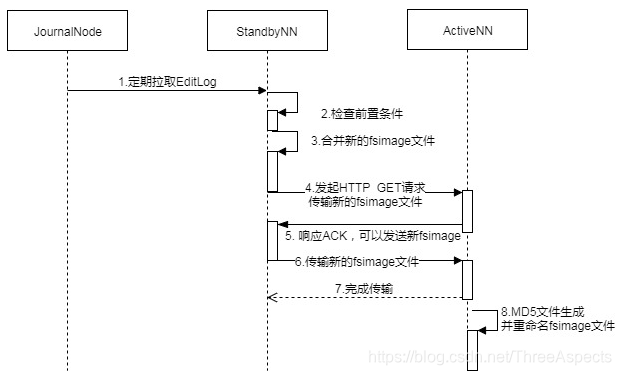
总的来说,就是在SNN上先检查前置条件,前置条件包括两个方面:距离上次Checkpointing的时间间隔和EditLog中事务条数限制。前置条件任何一个满足都会触发Checkpointing,然后SNN会将最新的NameSpace数据即SNN内存中当前状态的元数据保存到一个临时的fsimage文件( fsimage.ckpt)然后比对从JN上拉到的最新EditLog的事务ID,将fsimage.ckpt_中没有,EditLog中有的所有元数据修改记录合并一起并重命名成新的fsimage文件,同时生成一个md5文件。将最新的fsimage再通过HTTP请求传回ANN。通过定期合并fsimage有什么好处呢,主要有以下几个方面:
- 可以避免EditLog越来越大,合并成新fsimage后可以将老的EditLog删除
- 可以避免主NN(ANN)压力过大,合并是在SNN上进行的
- 可以保证fsimage保存的是一份最新的元数据,故障恢复时避免数据丢失
主备切换机制
要完成HA,除了元数据同步外,还得有一个完备的主备切换机制,Hadoop的主备选举依赖于ZooKeeper。下面是主备切换的状态图:
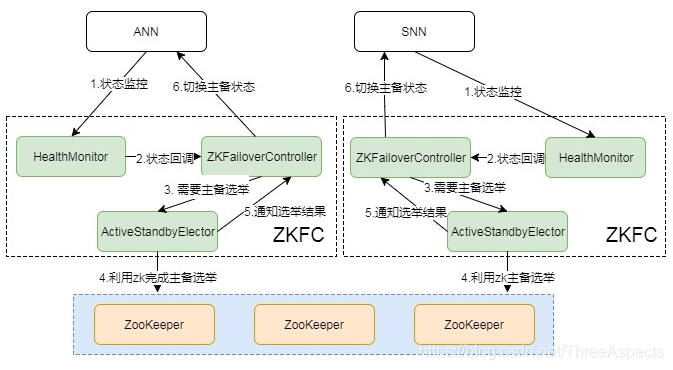
NameNode 主备切换主要由HealthMonitor、ZKFailoverController和ActiveStandbyElector这 3 个组件来协同实现:
- ZKFailoverController:作为 NameNode 机器上一个独立的进程启动 (在 hdfs 启动脚本之中的进程名为 zkfc),启动的时候会创建 HealthMonitor 和 ActiveStandbyElector 这两个主要的内部组件,ZKFailoverController 在创建 HealthMonitor 和 ActiveStandbyElector 的同时,也会向 HealthMonitor 和 ActiveStandbyElector 注册相应的回调方法,执行具体的切换操作
- HealthMonitor:监控NameNode健康状态,若状态异常会触发回调ZKFailoverController进行自动主备切换
- ActiveStandbyElector:主要负责完成自动的主备选举,内部封装了 Zookeeper 的处理逻辑,一旦 Zookeeper 主备选举完成,会回调 ZKFailoverController 的相应方法来进行 NameNode 的主备状态切换
NameNode 实现主备切换的流程
- HealthMonitor 初始化完成之后会启动内部的线程来定时调用对应 NameNode 的 HAServiceProtocol RPC 接口的方法,对 NameNode 的健康状态进行检测
- HealthMonitor 如果检测到 NameNode 的健康状态发生变化,会回调 ZKFailoverController 注册的相应方法进行处理
- 如果 ZKFailoverController 判断需要进行主备切换,会首先使用 ActiveStandbyElector 来进行自动的主备选举
- ActiveStandbyElector 与 Zookeeper 进行交互完成自动的主备选举
- ActiveStandbyElector 在主备选举完成后,会回调 ZKFailoverController 的相应方法来通知当前的 NameNode 成为主 NameNode 或备 NameNode
- ZKFailoverController 调用对应 NameNode 的 HAServiceProtocol RPC 接口的方法将 NameNode 转换为 Active 状态或 Standby 状态。
ActiveStandbyElector
Namenode(包括 YARN ResourceManager) 的主备选举是通过 ActiveStandbyElector 来完成的,ActiveStandbyElector 主要是利用了 Zookeeper 的写一致性和临时节点机制,具体的主备选举实现如下:
创建锁节点
如果 HealthMonitor 检测到对应的 NameNode 的状态正常,那么表示这个 NameNode 有资格参加 Zookeeper 的主备选举。如果目前还没有进行过主备选举的话,那么相应的 ActiveStandbyElector 就会发起一次主备选举,尝试在 Zookeeper 上创建一个路径为/hadoop-ha/$ {dfs.nameservices}/ActiveStandbyElectorLock 的临时节点 (${dfs.nameservices} 为 Hadoop 的配置参数 dfs.nameservices 的值,下同),Zookeeper 的写一致性会保证最终只会有一个 ActiveStandbyElector 创建成功,那么创建成功的 ActiveStandbyElector 对应的 NameNode 就会成为主 NameNode,ActiveStandbyElector 会回调 ZKFailoverController 的方法进一步将对应的 NameNode 切换为 Active 状态。而创建失败的 ActiveStandbyElector 对应的 NameNode 成为备 NameNode,ActiveStandbyElector 会回调 ZKFailoverController 的方法进一步将对应的 NameNode 切换为 Standby 状态。
注册 Watcher 监听
不管创建/hadoop-ha/${dfs.nameservices}/ActiveStandbyElectorLock 节点是否成功,ActiveStandbyElector 随后都会向 Zookeeper 注册一个 Watcher 来监听这个节点的状态变化事件,ActiveStandbyElector 主要关注这个节点的 NodeDeleted 事件。
自动触发主备选举
如果 Active NameNode 对应的 HealthMonitor 检测到 NameNode 的状态异常时, ZKFailoverController 会主动删除当前在 Zookeeper 上建立的临时节点/hadoop-ha/$ {dfs.nameservices}/ActiveStandbyElectorLock,这样处于 Standby 状态的 NameNode 的 ActiveStandbyElector 注册的监听器就会收到这个节点的 NodeDeleted 事件。收到这个事件之后,会马上再次进入到创建/hadoop-ha/$ {dfs.nameservices}/ActiveStandbyElectorLock 节点的流程,如果创建成功,这个本来处于 Standby 状态的 NameNode 就选举为主 NameNode 并随后开始切换为 Active 状态。
当然,如果是 Active 状态的 NameNode 所在的机器整个宕掉的话,那么根据 Zookeeper 的临时节点特性,/hadoop-ha/${dfs.nameservices}/ActiveStandbyElectorLock 节点会自动被删除,从而也会自动进行一次主备切换。
——————————————————————————————————————
在故障切换期间,ZooKeeper主要是发挥什么作用呢,有以下几点:
- 失败保护:集群中每一个NameNode都会在ZooKeeper维护一个持久的session,机器一旦挂掉,session就会过期,故障迁移就会触发
- Active NameNode选择:ZooKeeper有一个选择ActiveNN的机制,一旦现有的ANN宕机,其他NameNode可以向ZooKeeper申请排他成为下一个Active节点
- 防脑裂: ZK本身是强一致和高可用的,可以用它来保证同一时刻只有一个活动节点
那在哪些场景会触发自动切换呢,从HDFS-2185中归纳了以下几个场景:
- ActiveNN JVM奔溃:ANN上HealthMonitor状态上报会有连接超时异常,HealthMonitor会触发状态迁移至SERVICE_NOT_RESPONDING, 然后ANN上的ZKFC会退出选举,SNN上的ZKFC会获得Active Lock, 作相应隔离后成为Active结点
- ActiveNN JVM冻结:这个是JVM没奔溃,但也无法响应,同奔溃一样,会触发自动切换
- ActiveNN 机器宕机:此时ActiveStandbyElector会失去同ZK的心跳,会话超时,SNN上的ZKFC会通知ZK删除ANN的活动锁,作相应隔离后完成主备切换
- ActiveNN 健康状态异常: 此时HealthMonitor会收到一个HealthCheckFailedException,并触发自动切换
- Active ZKFC奔溃:虽然ZKFC是一个独立的进程,但因设计简单也容易出问题,一旦ZKFC进程挂掉,虽然此时NameNode是OK的,但系统也认为需要切换,此时SNN会发一个请求到ANN要求ANN放弃主结点位置,ANN收到请求后,会触发完成自动切换
- ZooKeeper奔溃:如果ZK奔溃了,主备NN上的ZKFC都会感知断连,此时主备NN会进入一个NeutralMode模式,同时不改变主备NN的状态,继续发挥作用,只不过此时,如果ANN也故障了,那集群无法发挥Failover, 也就不可用了,所以对于此种场景,ZK一般是不允许挂掉到多台,至少要有N/2+1台保持服务才算是安全的
HadoopHA机制,归纳起来主要是两块:元数据同步和主备选举。元数据同步依赖于QJM共享存储,主备选举依赖于ZKFC和Zookeeper。
如何防止脑裂
脑裂(split-brain),指在一个高可用(HA)系统中,当联系着的两个节点断开联系时,本来为一个整体的系统,分裂为两个独立节点,这时两个节点开始争抢共享资源,结果会导致系统混乱,数据损坏。
防止脑裂
共享存储的fencing,确保只有一个NN能写成功,使用QJM实现fencing。
NameNode每次写Editlog都需要传递一个编号Epoch给JN,JN会对比Epoch,如果比自己保存的Epoch大或相同,则可以写,JN更新自己的Epoch到最新,否则拒绝操作。在切换时,Standby转换为Active时,会把Epoch+1,这样就防止即使之前的NameNode向JN写日志,也会失败。
DataNode的fencing。确保只有一个NameNode能命令DataNode。
(a) 每个NameNode改变状态的时候,向DataNode发送自己的状态和一个序列号。
(b) DataNode在运行过程中维护此序列号,当failover时,新的NameNode在返回DataNode心跳时会返回自己的active状态和一个更大的序列号。DataNode接收到这个返回是认为该NameNode为新的active。
© 如果这时原来的active(比如GC)恢复,返回给DataNode的心跳信息包含active状态和原来的序列号,这时DataNode就会拒绝这个NameNode的命令。
客户端fencing。确保只有一个NameNode能响应客户端请求,让访问standby NameNode的客户端直接失败。
在RPC层封装了一层,通过FailoverProxyProvider以重试的方式连接NameNode。通过若干次连接一个NameNode失败后尝试连接新的NameNode,对客户端的影响是重试的时候增加一定的延迟。
===================================================================
其他博客提到的方法:
- 添加冗余的心跳线,例如双心跳线。尽量减少“裂脑”发生机会
- 使用fencing技术
RHCS 用的是fencing 机制,用一个可以被服务器控制的外部电源控制系统powerswitch来关闭掉一个node,解决争抢的问题. 如果不用powerswitch,还可以用服务器上自带的硬件管理设备,比如HP iLO远程控制或Dell DRAC, RHCS也支持直接去操控 SAN 交换机来做fencing.故障发生的时候,禁止某个node通过SAN交换机访问盘阵 - 使用仲裁机制
例如设置参考IP(如网关IP),当心跳线完全断开时,2个节点都各自ping一下 参考IP,不通则表明断点就出在本端,不仅“心跳”、还兼对外“服务”的本端网络链路断了,即使启动(或继续)应用服务也没有用了,那就主动放弃竞争,让能够ping通参考IP的一端去起服务。更保险一些,ping不通参考IP的一方干脆就自我重启,以彻底释放有可能还占用着的那些共享资源。
