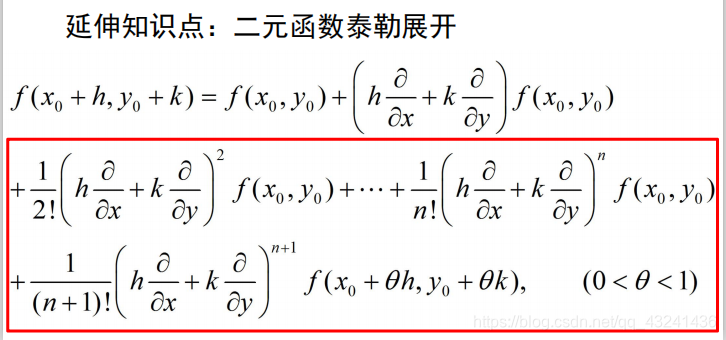
文章目录
1. Harris 角点检测
1.1 Harris 角点检测原理
Harris角点检测算法是最简单的角点检测方法之一。它的基本思想是使用一个固定窗口在图像上进行任意方向上的滑动,比较滑动前与滑动后两种情况,窗口中的像素灰度变化程度,如果存在任意方向上的滑动,都有着较大灰度变化,那么我们可以认为该窗口中存在角点。
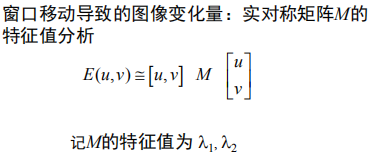
用数学方法来刻画角点特征:
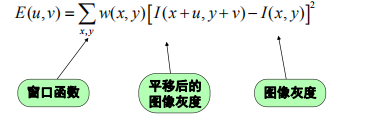
当窗口发生[u,v]移动时,那么滑动前与滑动后对应的窗口中的像素点灰度变化描述如下:
公式解释:
[u,v]是窗口的偏移量
(x,y)是窗口内所对应的像素坐标位置,窗口有多大,就有多少个位置
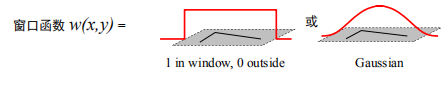
w(x,y)是窗口函数,最简单情形就是窗口内的所有像素所对应的w权重系数均为1。但有时候,我们会将w(x,y)函数设定为以窗口中心为原点的二元正态分布。如果窗口中心点是角点时,移动前与移动后,该点的灰度变化应该最为剧烈,所以该点权重系数可以设定大些,表示窗口移动时,该点在灰度变化贡献较大;而离窗口中心(角点)较远的点,这些点的灰度变化几近平缓,这些点的权重系数,可以设定小点,以示该点对灰度变化贡献较小,那么我们自然想到使用二元高斯函数来表示窗口函数,所以通常窗口函数有如下两种形式:
根据上述表达式,当窗口处在平坦区域上滑动,可以想象的到,灰度不会发生变化,那么E(u,v) = 0;如果窗口处在比纹理比较丰富的区域上滑动,那么灰度变化会很大。算法最终思想就是计算灰度发生较大变化时所对应的位置,当然这个较大是指针任意方向上的滑动,并非单指某个方向。
1.2 Harris角点检测实例代码
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
"""
Example of detecting Harris corner points (Figure 2-1 in the book).
"""
# 读入图像
im = array(Image.open('C://Users//Garfield//Desktop//01.jpg').convert('L'))
# 检测harris角点
harrisim = harris.compute_harris_response(im)
# Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()
#画出Harris响应图
subplot(141)
imshow(harrisim1)
print(harrisim1.shape)
axis('off')
axis('equal')
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = harris.get_harris_points(harrisim, 6, thres)
subplot(1, 4, i+2)
imshow(im)
print(im.shape)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '*')
axis('off')
#原书采用的PCV中PCV harris模块
#harris.plot_harris_points(im, filtered_coords)
# plot only 200 strongest
# harris.plot_harris_points(im, filtered_coords[:200])
show()
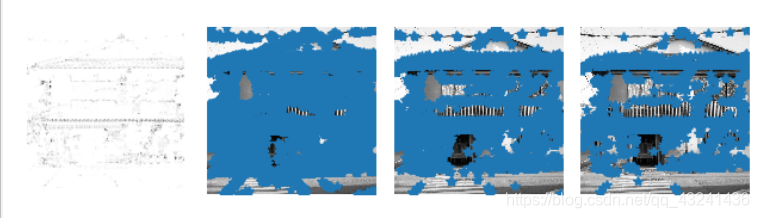
代码运行截图:
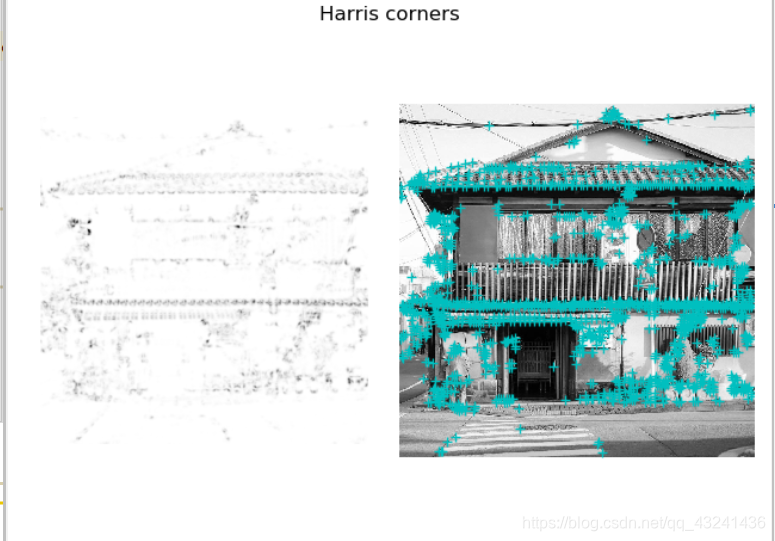
对上面代码稍作改动,角点检测的效果更为清晰:
参考博客
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
# 读入图像
im = array(Image.open('C://Users//Garfield//Desktop//01.jpg').convert('L'))
# 检测harris角点
harrisim = harris.compute_harris_response(im)
# Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()
#画出Harris响应图
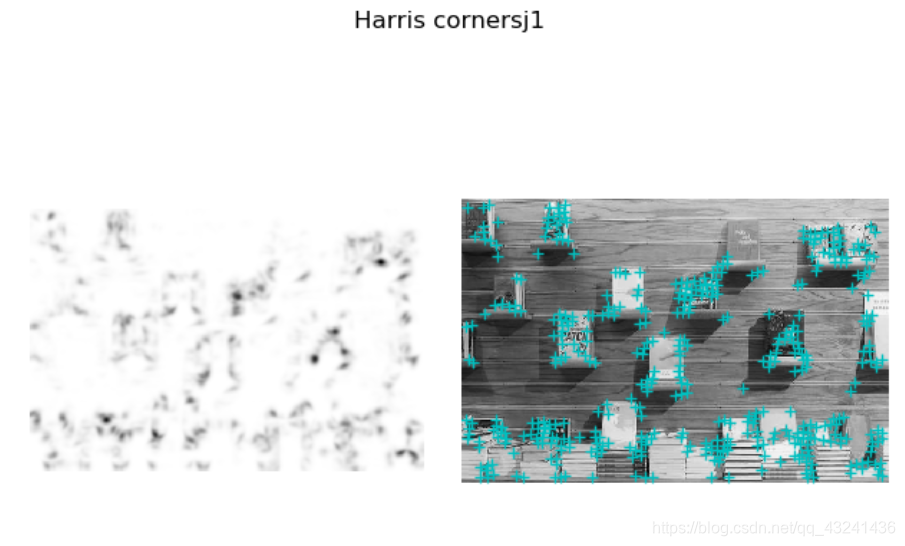
subplot(121)
suptitle("Harris corners")
imshow(harrisim1)
print (harrisim1.shape)
axis('off')
axis('equal')
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = harris.get_harris_points(harrisim, 6, thres)
subplot(1, 2, 2)
imshow(im)
print (im.shape)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '+c')
axis('off')
show()
2. 基于Harris角点检测对不同类型图像做出的对比实验
2.1 平坦图像的Harris角点检测实验结果
代码:
# -*- coding: utf-8 -*-
from pylab import *
from PIL import Image
from PCV.localdescriptors import harris
# 读入图像
im = array(Image.open('C://Users//Garfield//Desktop//p1.jpg').convert('L'))
# 检测harris角点
harrisim = harris.compute_harris_response(im)
# Harris响应函数
harrisim1 = 255 - harrisim
figure()
gray()
#画出Harris响应图
subplot(121)
suptitle("Harris corners")
imshow(harrisim1)
print (harrisim1.shape)
axis('off')
axis('equal')
threshold = [0.01, 0.05, 0.1]
for i, thres in enumerate(threshold):
filtered_coords = harris.get_harris_points(harrisim, 6, thres)
subplot(1, 2, 2)
imshow(im)
print (im.shape)
plot([p[1] for p in filtered_coords], [p[0] for p in filtered_coords], '+c')
axis('off')
show()
- 右侧面:
- 左侧面:
- 下方
- 正面:
- 上面近处偏暗:
2.1.1 实验结果分析
可以看到,中间区域的角点都没有的发生明显的改变,角度的变换会使变换周边的角点随着角度变化消失或者增加新的角点。
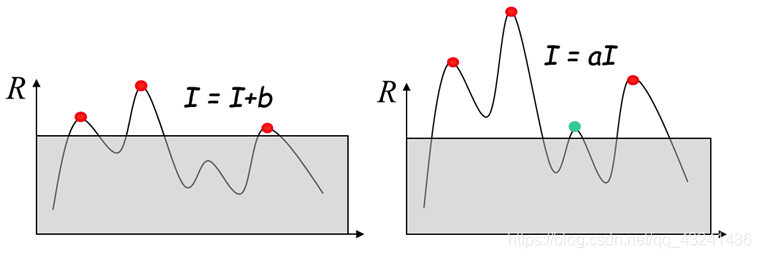
harris角点检测算子对亮度和对比度的变化不敏感
这是因为在进行Harris角点检测时,使用了微分算子对图像进行微分运算,而微分运算对图像密度的拉升或收缩和对亮度的抬高或下降不敏感。换言之,对亮度和对比度的仿射变换并不改变Harris响应的极值点出现的位置,但是,由于阈值的选择,可能会影响角点检测的数量。
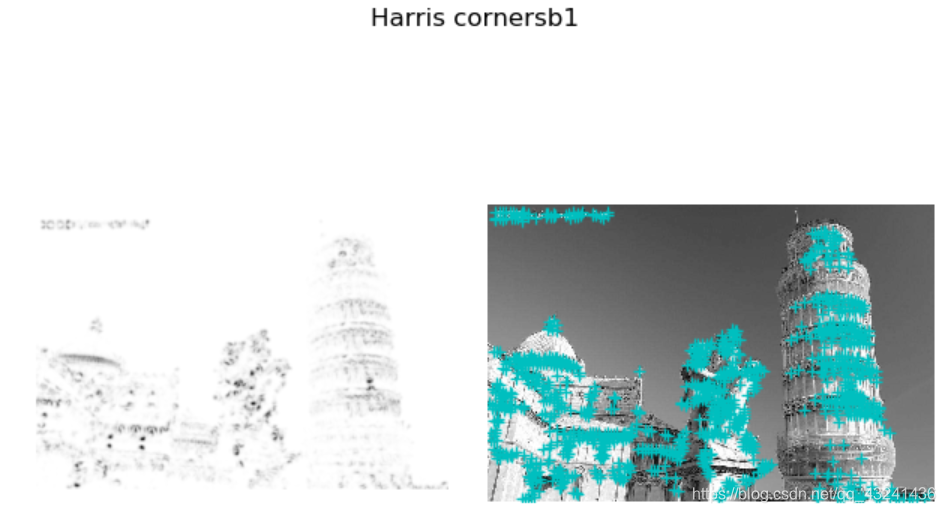
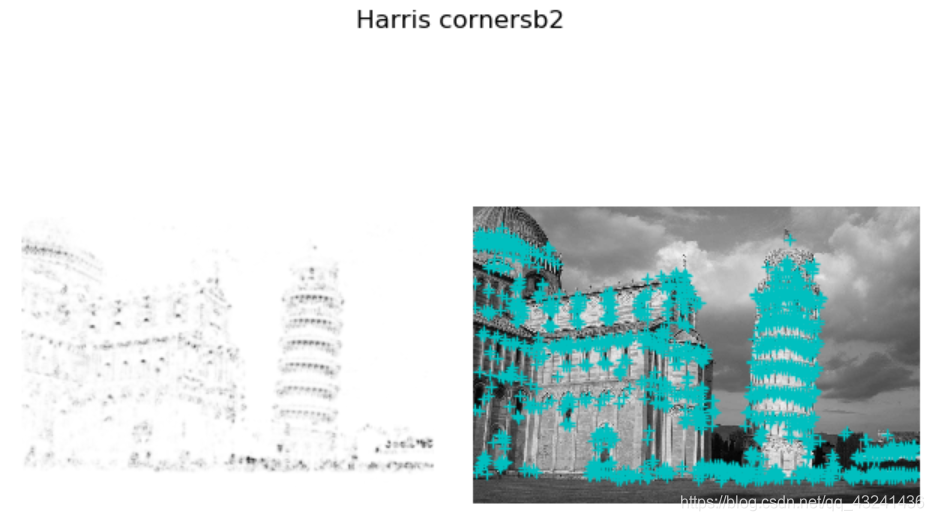
2.2 边缘丰富图像的Harris角点检测实验结果
- 蓝天白云下:
- 黄昏时:
- 光线暗时
- 换个角度
- 旋转
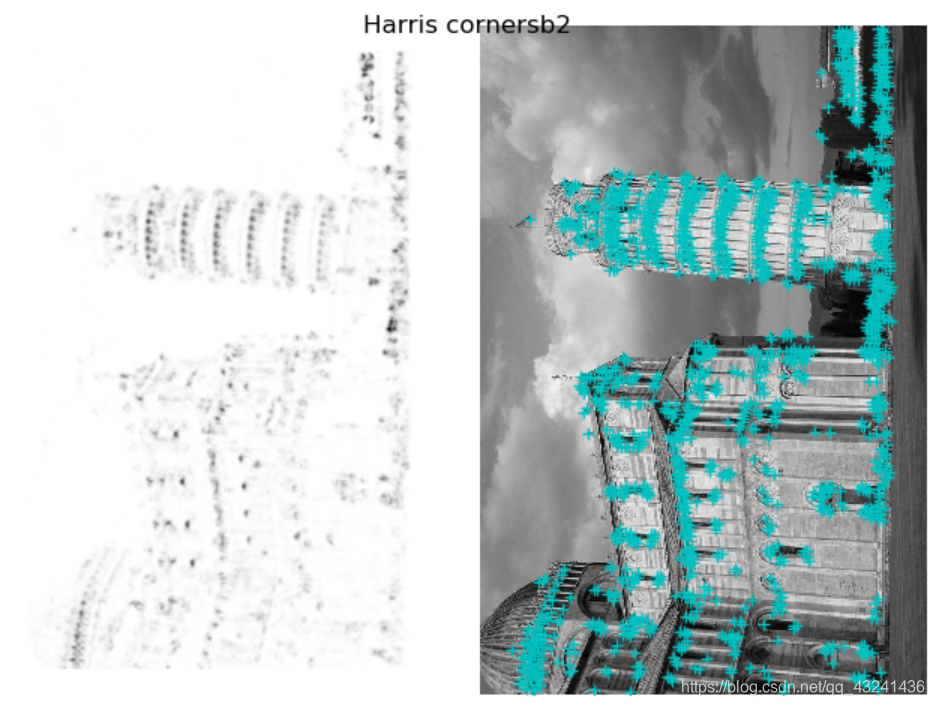
2.2.1 实验结果分析
对比b2正常角度与旋转变化的结果可以证实
Harris角点检测算子具有旋转不变性
Harris角点检测算子使用的是角点附近的区域灰度二阶矩矩阵。而二阶矩矩阵可以表示成一个椭圆,椭圆的长短轴正是二阶矩矩阵特征值平方根的倒数。当特征椭圆转动时,特征值并不发生变化,所以判断角点响应值RR也不发生变化,由此说明Harris角点检测算子具有旋转不变性。
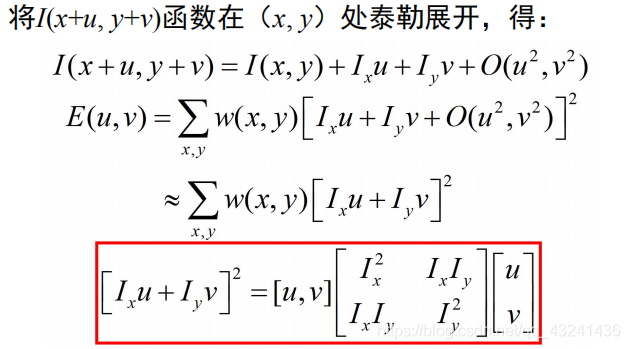
拓展:求解E(u,v)
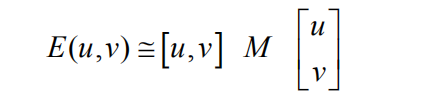
于是对于局部微小的移动量 [u,v],可以近似得到下面的表达:
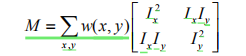
其中M是 2*2 矩阵,可由图像的导数求得:
Harris角点检测通过对窗口内的每个像素的x方向上的梯度与y方向上的梯度进行统计分析。这里以Ix和Iy为坐标轴,因此每个像素的梯度坐标可以表示成(Ix,Iy)。针对平坦区域,边缘区域以及角点区域三种情形进行分析:
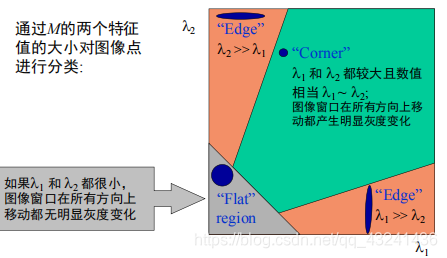
平坦区域上的每个像素点所对应的(IX,IY)坐标分布在原点附近,其实也很好理解,针对平坦区域的像素点,他们的梯度方向虽然各异,但是其幅值都不是很大,所以均聚集在原点附近;边缘区域有一坐标轴分布较散,至于是哪一个坐标上的数据分布较散不能一概而论,这要视边缘在图像上的具体位置而定,如果边缘是水平或者垂直方向,那么Iy轴方向或者Ix方向上的数据分布就比较散;角点区域的x、y方向上的梯度分布都比较散。
虽然一般利用E(u,v)来描述角点的基本思想,然而最终使用的还是矩阵M。矩阵M形式跟协方差矩阵形式很像,但不同之处在于一般协方差矩阵对应维的随机变量需要减去该维随机变量的均值,但矩阵M中并没有这样做,所以在矩阵M里,先进行各维的均值化处理,那么各维所对应的随机变量的均值为0,协方差矩阵就大大简化了,简化的最终结果就是矩阵。
如果对协方差矩阵M进行对角化,很明显,特征值就是主分量上的方差。如果存在两个主分量所对应的特征值都比较大,说明像素点的梯度分布比较散,梯度变化程度比较大,符合角点在窗口区域的特点;如果是平坦区域,那么像素点的梯度所构成的点集比较集中在原点附近,因为窗口区域内的像素点的梯度幅值非常小,此时矩阵M的对角化的两个特征值比较小;如果是边缘区域,在计算像素点的x、y方向上的梯度时,边缘上的像素点的某个方向的梯度幅值变化比较明显,另一个方向上的梯度幅值变化较弱,其余部分的点都还是集中原点附近,这样M对角化后的两个特征值理论应该是一个比较大,一个比较小,当然对于边缘这种情况,可能是呈45°的边缘,致使计算出的特征值并不是都特别的大,总之跟含有角点的窗口的分布情况还是不同的。
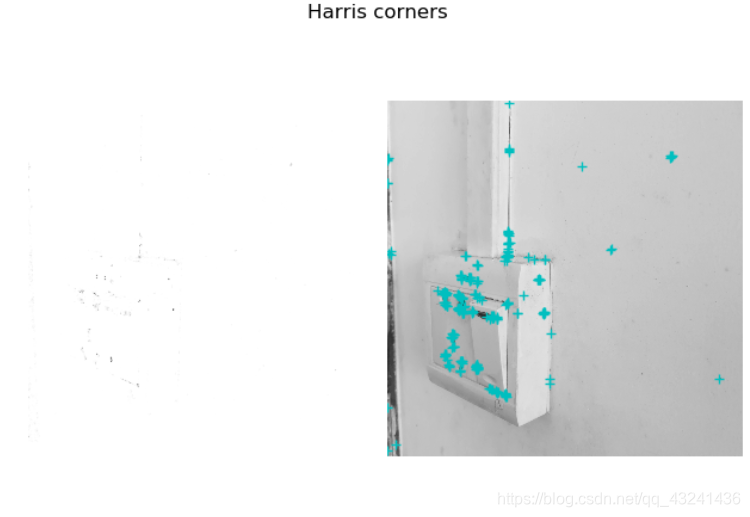
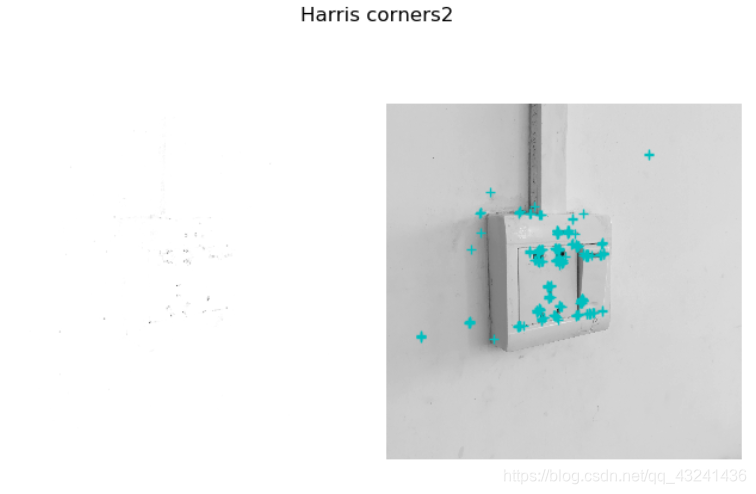
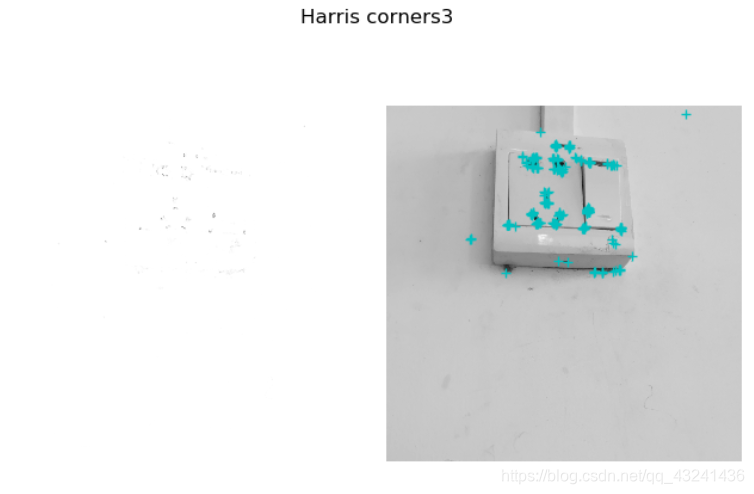
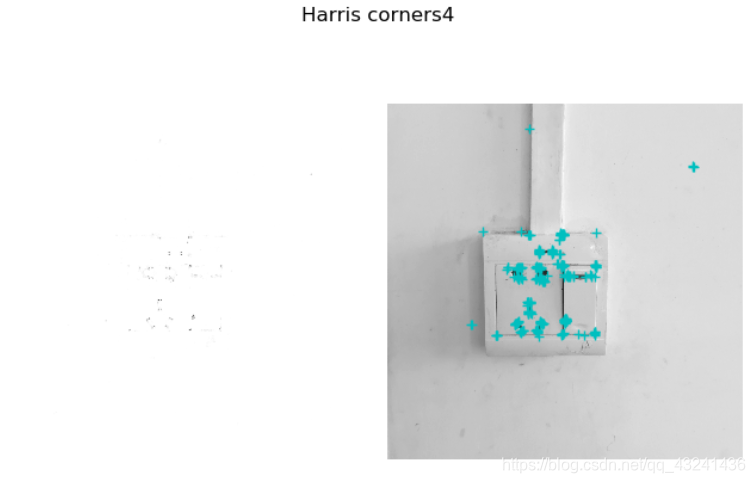
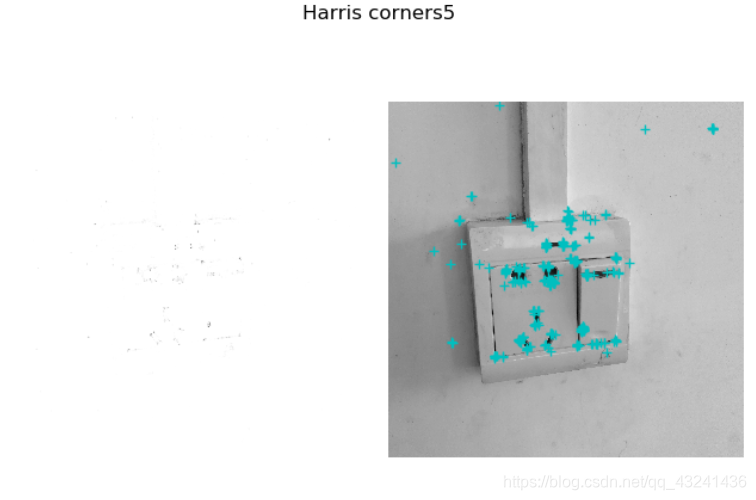
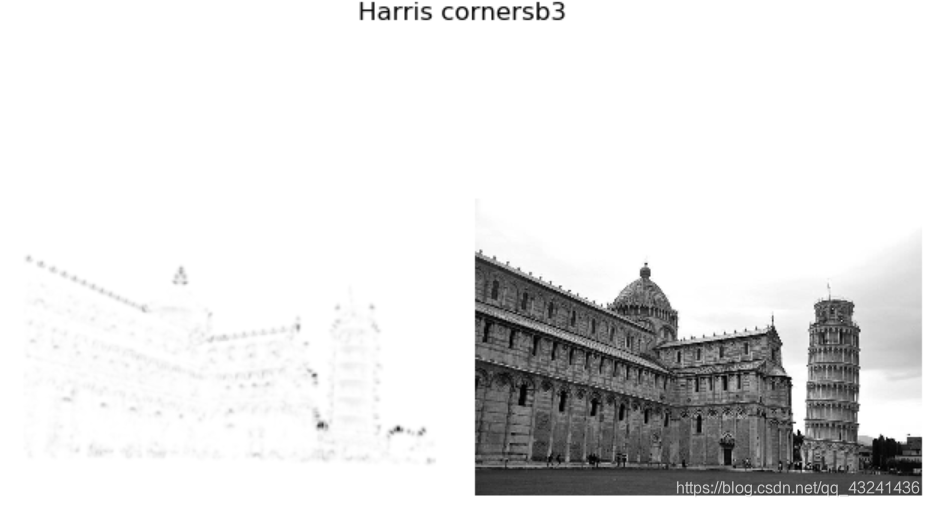
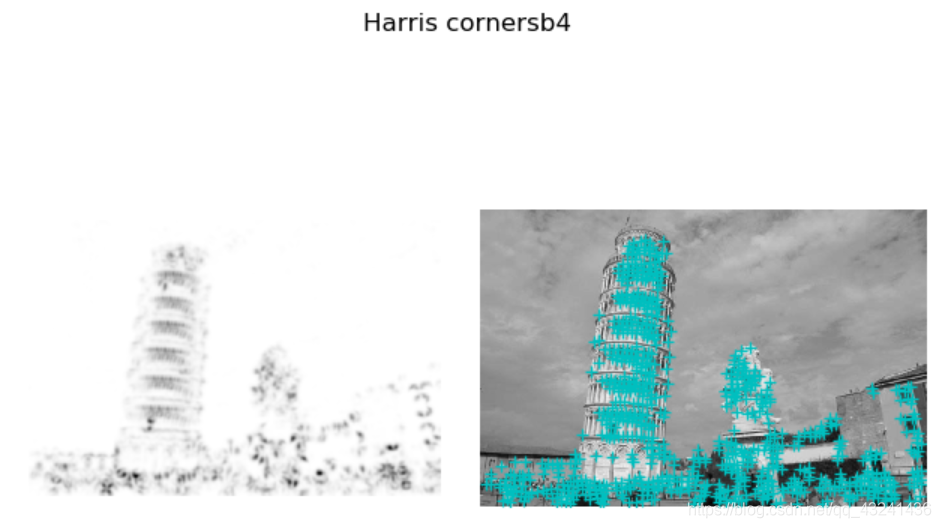
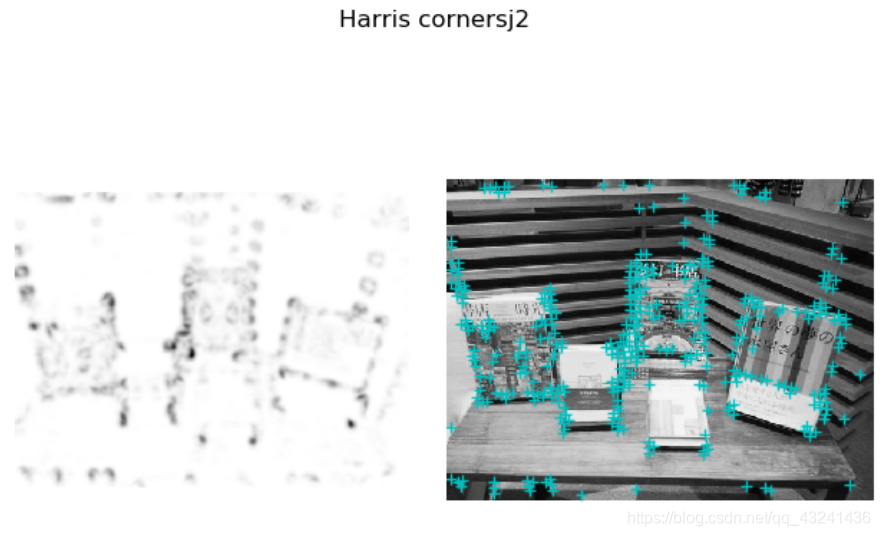
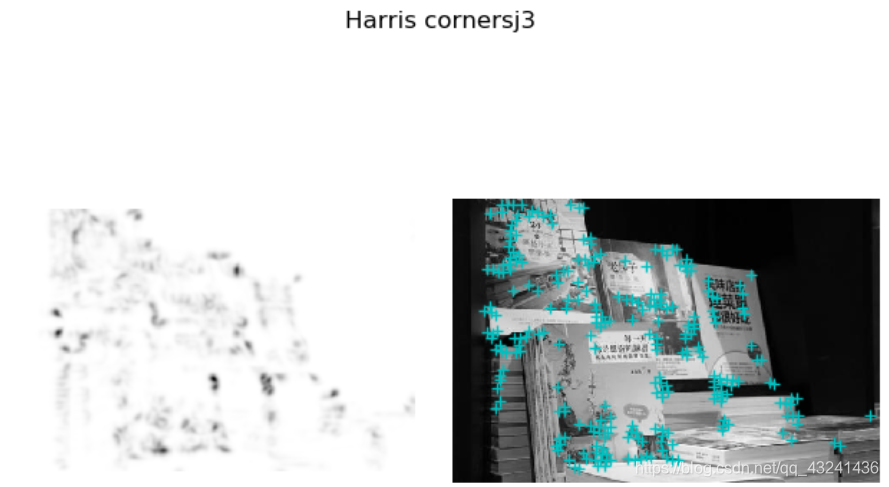
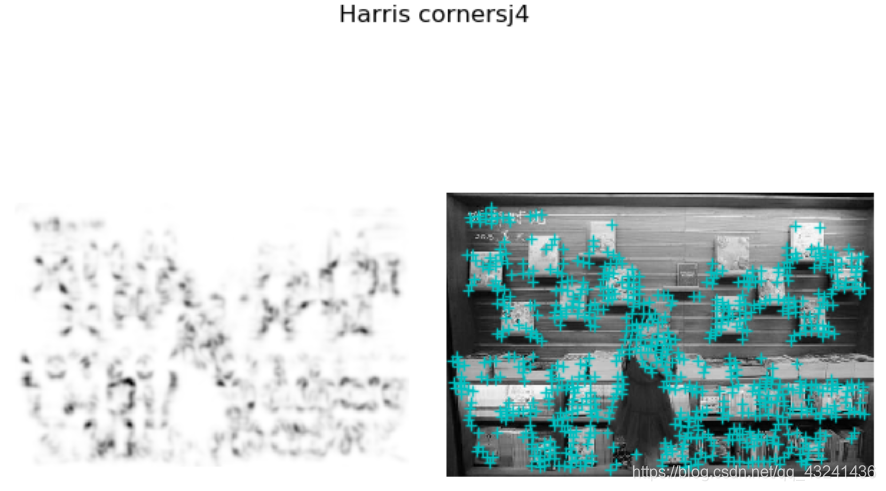
2.3 角点丰富图像的Harris角点检测实验结果
-
正面暖光
-
近
-
侧面
-
正面白光
-
左侧
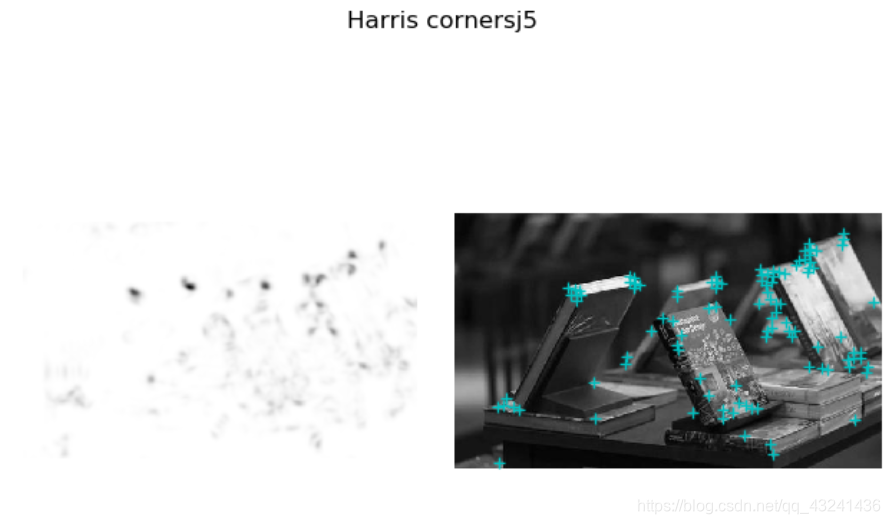
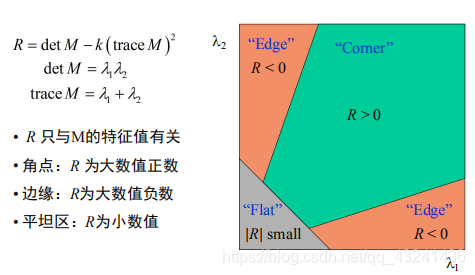
2.3.1 实验结果分析
可以明显看到侧面相当于正面来说角点数大幅度减少,经过实验还可得知一定程度的光照可以使得角点更易被捕捉,而太明亮或者太暗都会使实验结果不理想,甚至无法识别到角点,但角点的关键点并不会改变。
同时可以看到远处与近处图片的对比,关键点明显改变,可证实:
Harris角点检测算子不具有尺度不变性
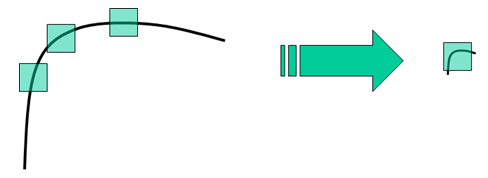
正如下图所示,当右图被缩小时,在检测窗口尺寸不变的前提下,在窗口内所包含图像的内容是完全不同的。左侧的图像可能被检测为边缘或曲线,而右侧的图像则可能被检测为一个角点。
参考博客https://blog.csdn.net/lwzkiller/article/details/54633670
参考博客https://blog.csdn.net/weixin_41923000/article/details/88631944
参考博客https://blog.csdn.net/qq_41598072/article/details/83651629
