目标检测领域的深度学习方法大多分为两类,一步网络和两步网络。一步网络以速度快、实用性高著称,其将特征提取和bounding box生成放在一个网络中;而两步网络以精度高著称,其将特征提取和bounding box的生成放在两个不同的网络中。
├── YOLO
? - [YOLO所有的论文] [YOLO所有的代码]
? - [You Only Look Once: Unified, Real-Time Object Detection]
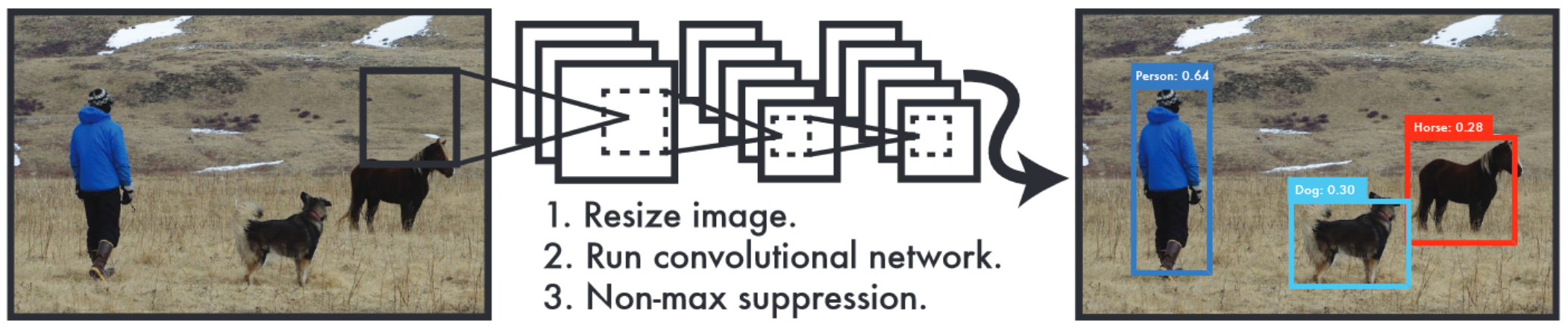
如下图所示,输入448×448的图像经过特征提取网络后,会生成
S
×
S
S×S
S × S
S
×
S
S×S
S × S
S
×
S
×
k
S×S×k
S × S × k
c
o
n
f
i
d
e
n
c
e
=
Pr
(
Class
i
)
∗
IOU
pred
truth
confidence=\operatorname{Pr}\left(\text { Class }_{i}\right) * \text { IOU }_{\text {pred }}^{\text {truth }}
c o n f i d e n c e = P r ( Class i ) ∗ IOU pred truth
Pr
(
Class
i
)
\operatorname{Pr}\left(\text { Class }_{i}\right)
P r ( Class i )
下图是YOLO v1的特征提取网络的结构图,网络的前部分采用的是AlaxNet,去掉原先网络的后几层使其输出为7×7×30的featuremap。
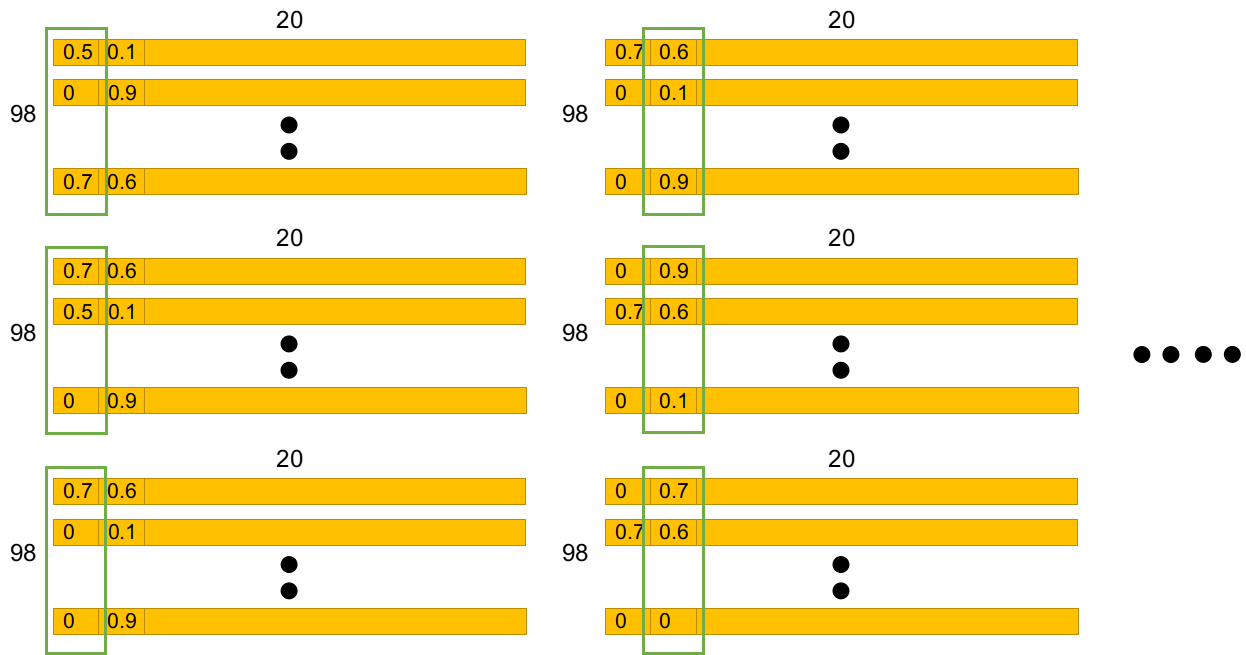
下图展示了输出7×7×30的featuremap所包含的内容,输入图像会分为7×7个grid,每个grid会生成2个anchors,所以每个会有(x,y,w,h)四个输出,一共8个输出,每个anchors还会有一个confidence,这些包含在输出的前10个值。后面的20个输出,对应此grid分为20个类的概率。
最后网络的输出进行NMS,也就是非极大值抑制,流程如下:
λ
coord
∑
i
=
0
S
2
∑
j
=
0
B
1
i
j
obj
[
(
x
i
−
x
^
i
)
2
+
(
y
i
−
y
^
i
)
2
]
+
λ
coord
∑
i
=
0
S
2
∑
j
=
0
B
1
i
j
obj
[
(
w
i
−
w
^
i
)
2
+
(
h
i
−
h
^
i
)
2
]
+
∑
i
=
0
S
2
∑
j
=
0
B
1
i
j
obj
(
C
i
−
C
^
i
)
2
+
λ
nootij
∑
i
=
0
S
2
∑
j
=
0
B
1
i
j
noobj
(
C
i
−
C
^
i
)
2
+
∑
i
=
0
S
2
1
i
obj
∑
c
∈
celasses
(
p
i
(
c
)
−
p
^
i
(
c
)
)
2
\begin{aligned} \lambda_{\text {coord }} \sum_{i=0}^{S^{2}} \sum_{j=0}^{B} \mathbb{1}_{i j}^{\text {obj }}\left[\left(x_{i}-\hat{x}_{i}\right)^{2}+\left(y_{i}-\hat{y}_{i}\right)^{2}\right] \\+\lambda_{\text {coord }} \sum_{i=0}^{S^{2}} \sum_{j=0}^{B} \mathbb{1}_{i j}^{\text {obj }}\left[(\sqrt{w_{i}}-\sqrt{\hat{w}_{i}})^{2}+(\sqrt{h_{i}}-\sqrt{\hat{h}_{i}})^{2}\right] \\+\sum_{i=0}^{S^{2}} \sum_{j=0}^{B} \mathbb{1}_{i j}^{\text {obj }}\left(C_{i}-\hat{C}_{i}\right)^{2} \\+\lambda_{\text {nootij }} \sum_{i=0}^{S^{2}} \sum_{j=0}^{B} \mathbb{1}_{i j}^{\text {noobj }}\left(C_{i}-\hat{C}_{i}\right)^{2} \\+\sum_{i=0}^{S^{2}} \mathbb{1}_{i}^{\text {obj }} \sum_{c \in \text { celasses }}\left(p_{i}(c)-\hat{p}_{i}(c)\right)^{2} \end{aligned}
λ coord i = 0 ∑ S 2 j = 0 ∑ B 1 i j obj [ ( x i − x ^ i ) 2 + ( y i − y ^ i ) 2 ] + λ coord i = 0 ∑ S 2 j = 0 ∑ B 1 i j obj [ ( w i
− w ^ i
) 2 + ( h i
− h ^ i
) 2 ] + i = 0 ∑ S 2 j = 0 ∑ B 1 i j obj ( C i − C ^ i ) 2 + λ nootij i = 0 ∑ S 2 j = 0 ∑ B 1 i j noobj ( C i − C ^ i ) 2 + i = 0 ∑ S 2 1 i obj c ∈ celasses ∑ ( p i ( c ) − p ^ i ( c ) ) 2
其中
λ
coord
=
5
\lambda_{\text {coord }}=5
λ coord = 5
λ
noob
j
=
0.5
\lambda_{\text {noob } j}=0.5
λ noob j = 0 . 5
? - [YOLO9000: Better, Faster, Stronger]
扫描二维码关注公众号,回复:
9568095 查看本文章
? - [YOLOv3: An Incremental Improvement]
?传送门 [目标检测] [目标检测数据集指标分析] [YOLO:You Only Look Once系列的学习] [在Nvidia Jetson Nano上利用YOLO进行目标检测的实践过程]