上一篇写了SPI总线的原理,建议先看原理,链接如下:
FPGA——SPI总线详解(概念)_居安士的博客-CSDN博客
这一篇分别来实现SPI总线的flash写使能,读状态
目录
flash写使能
写使能模块要实现控制模块输入start_wr(启动信号)和wren_cmd(写使能指令),写使能信号能把指令输出给spi总线,写使能框图如下:
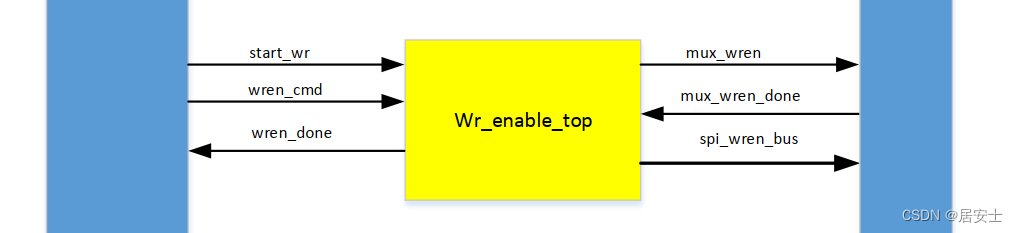
输入输出信号:
| 名称 |
输入/输出 |
位宽 |
解释 |
| clk_25m |
input |
1 |
时钟信号 |
| reset |
input |
1 |
复位信号 |
| start_wr |
input |
1 |
开始写使能 |
| wren_cmd |
input |
1 |
指令信号(0/1) |
| mux_wren_done |
input |
1 |
总线返回信号 |
| mux_wren |
output |
1 |
向总线发送请求 (1:开启 0:关闭) |
| wren_done |
output |
1 |
写使能完成 |
| spi_cs |
output |
1 |
向总线传输的片选线 |
| spi_clk |
output |
1 |
向总线传输的时钟线 |
| spi_dout |
output |
1 |
向总线传输的数据线 |
| cnt_wren |
reg |
3 |
发送指令个数寄存器(一共8个) |
| wren_cmd_reg |
reg |
1 |
指令缓存 |
| valid_cmd |
reg |
7 |
指令寄存器 |
写使能时序图:

根据时序图,,当片选线拉低了,开始向总线输出DI(06/04),输出clk采集数据,特别需要注意的是,SPI先发送高位数据,且以字节(8bit)为单位去发送
写使能状态机流程图如下:
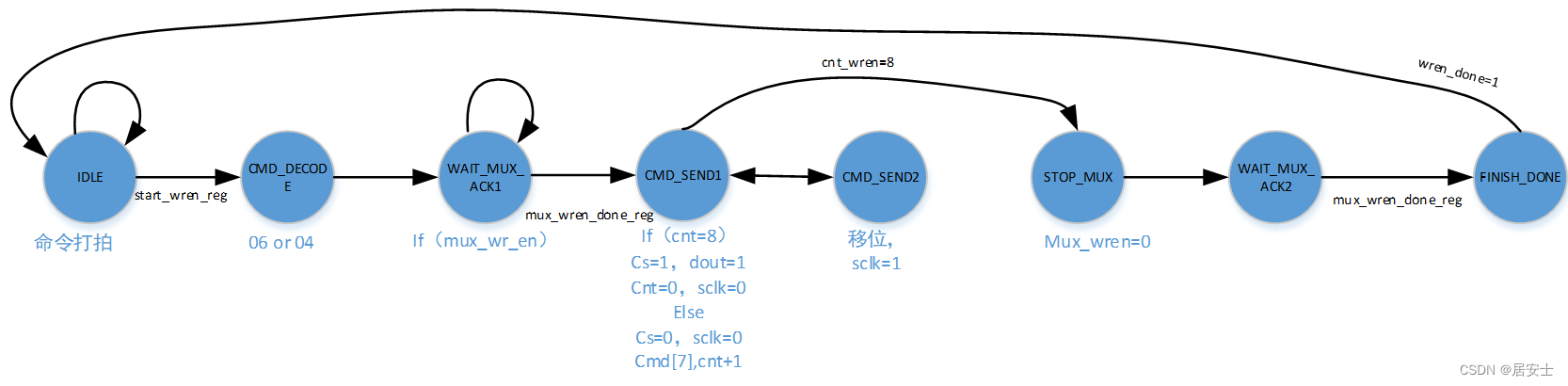 先把输入的start_wr,wren_cmd ,mux_wren_done打一拍
先把输入的start_wr,wren_cmd ,mux_wren_done打一拍
1初始状态下:/cs=1,clk=0,dout=1,wren_cnt=0,vaild_cmd=0,如果start_wr=1则跳转
2指令解析状态:如果指令为0,则输出04;如果指令为1,则输出06,直接跳转
3等待总线应答:向总线发送开始请求,如果应答完成,跳转
4发送状态1:如果cnt==8,发送完成,clk=0,cs拉低,dout=1跳转停止状态;如果没有完成,cnt+1,cs拉低,clk=0,把vaild_cmd[7]给dout,跳转发送状态2
5发送状态2:cs拉低,clk=1把vaild_cmd进行移位,确保每一次都发送的高位
6停止状态:向总线发送停止请求
7等总线应答:如果应答完成,跳转
8完成状态:wren_done=1
代码如下:
module wr_enable(
input clk,
input reset,
input start_wr,//启动写使能
input wren_cmd,//写使能命令
input mux_wren_done,//总线ack
output reg mux_wren , //启动总线
output reg spi_cs , //
output reg spi_clk , //
output reg spi_dout , //
output reg wren_done //写使能完成
);
reg wren_cmd_reg;
reg [3:0]cnt_wren;//8位指令计数器
reg [7:0] cmd_valid;//8位指令
reg [3:0] state;
always@(posedge clk)begin
if(reset)begin
mux_wren <=1'd0;
spi_cs <=1'd1;
spi_clk <=1'd0;
spi_dout <=1'd1;
wren_done<=1'd0;
cnt_wren <=4'd0;
cmd_valid<=8'd0;
wren_cmd_reg<=1'd0;
state <=4'd0;
end
else begin
case(state)
4'd0:begin
if(start_wr)begin
state <=4'd1;
wren_cmd_reg<=wren_cmd;//缓存指令:0→ 04h 1→06h
end
else begin
state <=4'd0;
end
end
4'd1:begin
case(wren_cmd_reg)
0:cmd_valid<=8'h04;
1:cmd_valid<=8'h06;
endcase
state <=4'd2;
end
4'd2:begin
mux_wren<=1'd1;
if(mux_wren_done==1'd1)begin
state <=4'd3;
end
else begin
state <=4'd2;
end
end
4'd3:begin
if(cnt_wren==4'd8)begin
cnt_wren<=4'd0;//计数器清零
spi_clk <=1'd0;
spi_cs <=1'd1;//片选拉低
spi_dout <=1'd1;
state <=4'd5;
end
else begin
cnt_wren<=cnt_wren+4'd1;
spi_clk <=1'd0;//clk=0
spi_cs <=1'd0;
spi_dout <=cmd_valid[7];//把最高位给dout
state <=4'd4;
end
end
4'd4:begin
state <=4'd3;
spi_clk <=1'd1;//clk=1
spi_cs <=1'd0;
cmd_valid<={cmd_valid[6:0],1'b0};//移位
end
4'd5:begin
mux_wren<=1'd0;
state <=4'd6;
end
4'd6:begin
if(mux_wren_done==1'd1)begin
state <=4'd7;
end
else begin
state <=4'd6;
end
end
4'd7:begin
wren_done<=1'd1;//发送完成
state <=4'd0;
end
endcase
end
end
endmodule编写仿真代码:
module TB_wr_enable(
);
reg clk;
reg reset;
reg start_wr;
reg wren_cmd;
reg mux_wren_done;
wire mux_wren ;
wire spi_cs ;
wire spi_clk ;
wire spi_dout ;
wire wren_done;
wr_enable inst_wr_enable(
.clk (clk),
.reset (reset),
.start_wr (start_wr),//启动写使能
.wren_cmd (wren_cmd),//写使能命令
.mux_wren_done(mux_wren_done),//总线ack
.mux_wren (mux_wren), //启动总线
.spi_cs (spi_cs), //
.spi_clk (spi_clk), //
.spi_dout (spi_dout), //
.wren_done(wren_done) //写使能完成
);
initial begin
clk=0;
reset=1;
#100
reset=0;
#1000
wren_cmd=0;
start_wr=1;
#100
start_wr=0;
//#100
//wren_cmd=1;
//start_wr=1;
//#100
//start_wr=0;
end
always #20 clk=~clk;
reg [3:0]state_tb;
always @(posedge clk)begin
if(reset)begin
state_tb<=4'd0;
mux_wren_done<=1'b0;
end
else begin
mux_wren_done<=1'b0;
case(state_tb)
4'd0:begin
if(start_wr)
state_tb<=4'd1;
end
4'd1:begin
if(mux_wren) begin //请求总线
state_tb<=4'd2;
mux_wren_done<=1'b1;
end
else begin
state_tb<=4'd1;
mux_wren_done<=1'b0;
end
end
4'd2:begin
if(!mux_wren) begin //释放总线
state_tb<=4'd3;
mux_wren_done<=1'b1;
end
else begin
state_tb<=4'd2;
mux_wren_done<=1'b0;
end
end
4'd3:begin
state_tb<=4'd0;
mux_wren_done<=1'b0;
end
default:begin
state_tb<=4'd0;
end
endcase
end
end
endmodule
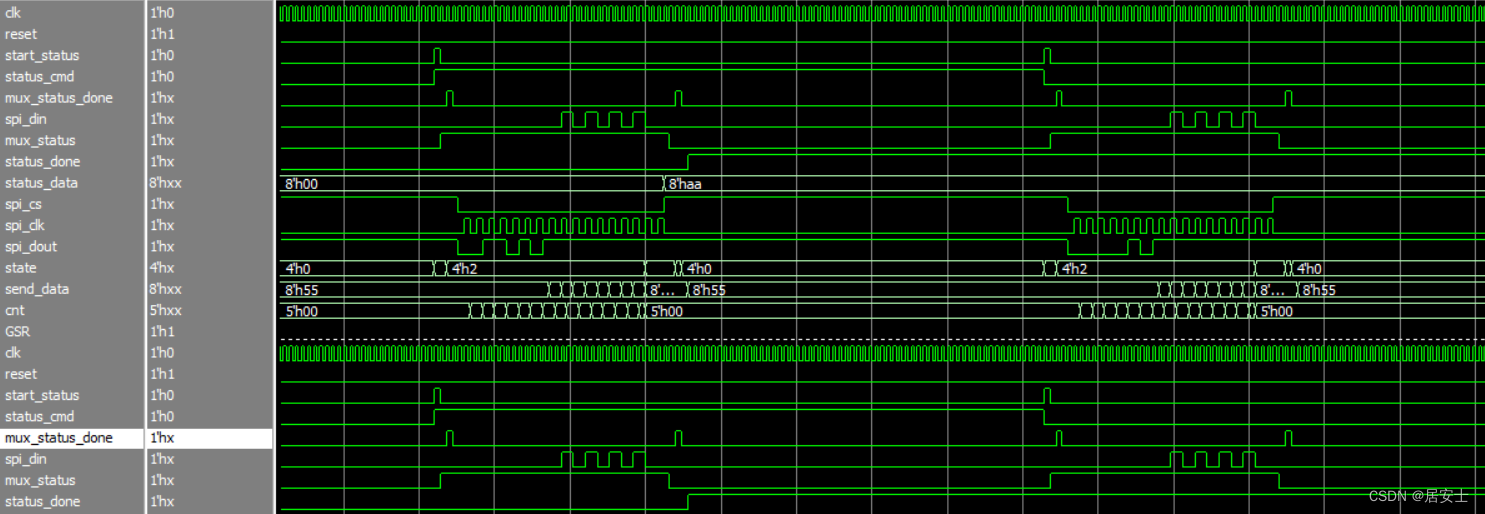
接下来可以看一下仿真的效果,可以看出和数据手册是一致的:

spi_dout输出0000_0100 (04)

spi_dout输出0000_0110 (06)
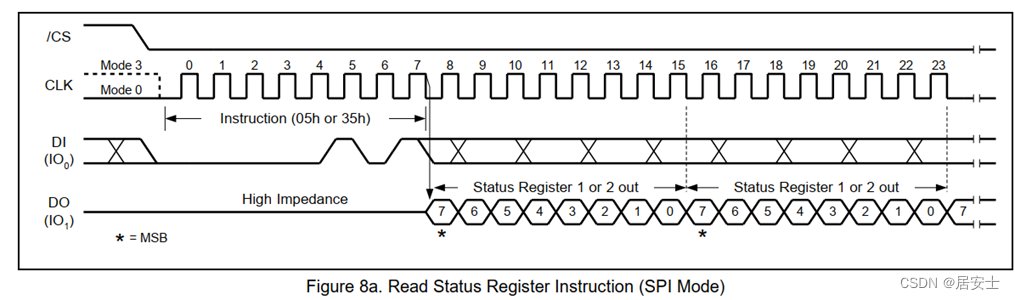
flash读状态
通过将 /CS 驱动为低电平并将状态寄存器 1 的指令代码“05h”或状态寄存器 2 的指令代码“35h”在 CLK 的上升沿移入 DI 引脚来输入指令。 然后,状态寄存器位在 CLK 的下降沿在 DO 引脚上移出,最高有效位 (MSB) 在前,时序图如图所示:
读状态模块图:
和写使能不同的是,多了数据传输
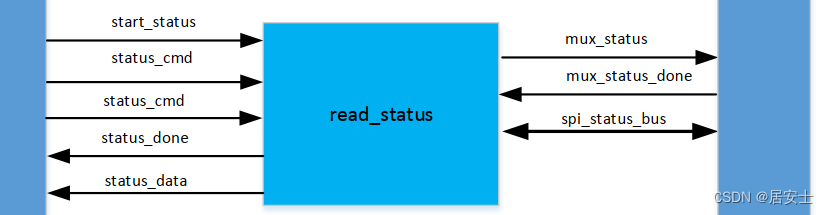
读状态输入输出:
| 名称 |
输入/输出 |
位宽 |
解释 |
| start_status |
input |
1 |
开始读状态 |
| status_cmd |
input |
1 |
读状态指令 |
| mux_status_done |
input |
1 |
总线返回信号 |
| mux_status |
output |
1 |
请求总线 |
| status_done |
output |
1 |
读状态完成 |
| status_data |
output |
8 |
读取数据 |
| spi_cs |
output |
1 |
spi片选线 |
| spi_clk |
output |
1 |
spi时钟线 |
| spi_dout |
output |
1 |
输入spi |
| spi_din |
input |
1 |
spi输出 |
| cnt_status |
reg |
8 |
指令计数器 |
| vaild_cmd |
reg |
8 |
指令寄存器 |
| received_data |
reg |
8 |
数据寄存器 |
读状态模块流程图如下:
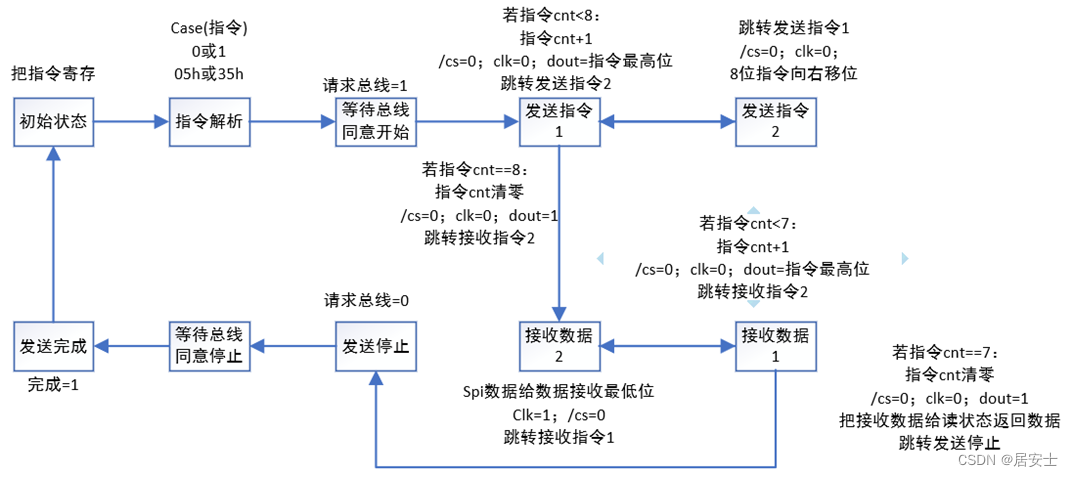
读状态一共有10个状态:
0(初始状态):把0或者1的指令信号进行寄存,防止解析时没有指令信号
1(指令解析):根据0或者1,得到35h或者05h的指令
2(请求总线1):请求开放总线,若应答则跳转
3(发送指令1):得到指令35h或者05h最高位,8位都得到后跳转
4(发送指令2):将指令35h或者05h移位
5(接收数据1):对接收数据进行移位(低位就会移成高位),全部接收后跳转
6(接收数据2):将数据55h(来自读状态寄存器)的最高位给接收数据最低位
7(发送停止):请求关闭总线
8(请求总线2):等待总线应答
9(发送完成):发送完成指令=1
代码如下:
module read_status(
input clk ,
input reset ,
input start_status ,//开始读状态
input status_cmd ,//读状态指令
input mux_status_done ,//总线返回
input spi_din ,//由总线输入
output reg mux_status ,//请求总线
output reg status_done ,//读状态完成
output reg [7:0] status_data,//读状态返回8位数据
output reg spi_cs ,//片选信号
output reg spi_clk ,//时钟信号
output reg spi_dout //总线输入
);
reg [3:0] cnt_status ;//指令计数器
reg status_cmd_reg ;//指令缓存
reg [7:0] vaild_cmd ;//指令寄存器
reg [7:0] received_data;//接收数据
reg [3:0] state;
always@(posedge clk)begin
if(reset)begin
mux_status <=1'd0;
status_done <=1'd0;
status_data <=8'd0;
spi_cs <=1'd1;
spi_clk <=1'd0;
spi_dout <=1'd1;
cnt_status <=4'd0;
status_cmd_reg <= 1'd0;
vaild_cmd <=8'd0;
received_data <=8'd0;
state<=4'd0;
end
else begin
case(state)
4'd0:begin
if(start_status)begin
state<=4'd1;
status_cmd_reg<=status_cmd;
end
else begin
state<=4'd0;
end
end
4'd1:begin
case(status_cmd_reg)
1'd0:vaild_cmd<=8'h05;
1'd1:vaild_cmd<=8'h35;
endcase
mux_status<=1'd1;
state<=4'd2;
end
4'd2:begin
if(mux_status_done)begin
state<=4'd3;
end
else begin
state<=4'd2;
end
end
4'd3:begin
if(cnt_status==4'd8)begin
state<=4'd6;//直接跳转到数据接收2,这样的目的是spi clk可连续
cnt_status<=4'd0;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=1'd1;
end
else begin
cnt_status<=cnt_status+4'd1;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=vaild_cmd[7];
state<=4'd4;
end
end
4'd4:begin
state<=4'd3;
spi_clk <=1'd1;
spi_cs <=1'd0;
vaild_cmd<={vaild_cmd[6:0],1'b0};
end
4'd5:begin
if(cnt_status==4'd8)begin
state<=4'd7;
cnt_status<=4'd0;
spi_cs <=1'd1;
spi_clk <=1'd0;
spi_dout <=1'd1;
status_data<=received_data;
end
else begin
cnt_status<=cnt_status+4'd1;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=1'd1;
received_data<={received_data[6:0],received_data[7]};//received_data最低位移位到最高位
state<=4'd6;
end
end
4'd6:begin
state<=4'd5;
spi_clk <=1'd1;
spi_cs <=1'd0;
received_data[0]<=spi_din;//din给received_data最低位
end
4'd7:begin
mux_status<=1'd0;
state<=4'd8;
end
4'd8:begin
if(mux_status_done)begin
state<=4'd9;
end
else begin
state<=4'd8;
end
end
4'd9:begin
status_done<=1'd1;
state<=4'd0;
end
endcase
end
end
endmoduleTB仿真代码:
module TB_read_status(
);
reg clk ;
reg reset ;
reg start_status ;
reg status_cmd ;
reg mux_status_done;
reg spi_din ;
wire mux_status ;
wire status_done ;
wire [7:0] status_data ;
wire spi_cs ;
wire spi_clk ;
wire spi_dout ;
read_status inst_read_status(
.clk (clk) ,
.reset (reset) ,
.start_status (start_status) ,//开始读状态
.status_cmd (status_cmd) ,//读状态指令
.mux_status_done(mux_status_done) ,//总线返回
.spi_din (spi_din) ,//由总线输入
.mux_status (mux_status) ,//请求总线
.status_done (status_done) ,//读状态完成
.status_data (status_data) ,//读状态返回8位数据
.spi_cs (spi_cs) ,//片选信号
.spi_clk (spi_clk) ,//时钟信号
.spi_dout (spi_dout) //总线输入
);
initial begin
clk=0;
reset=1;
start_status=0;
status_cmd=0;
#100;
reset=0;
#4000
start_status=1;
status_cmd=1;
#40
start_status=0;
#4000
start_status=1;
status_cmd=0;
#40
start_status=0;
end
always #20 clk=~clk;
reg [3:0]state;
reg [7:0]send_data;
reg [4:0]cnt;
always@(posedge clk)begin
if(reset)begin
state<=4'd0;
mux_status_done<=1'd0;
spi_din<=1'd0;
send_data<=8'd0;
cnt<=4'd0;
end
else begin
case(state)
4'd0:begin
spi_din <=1'd0;
send_data<=8'H55;//发送数据
cnt<=4'd0;
if(start_status)begin
state<=4'd1;
end
else begin
state<=4'd0;
end
end
4'd1:begin
if(mux_status==1'd1)begin//通讯开始
mux_status_done<=1'd1;
state<=4'd2;
end
else begin
state<=4'd1;
mux_status_done<=1'd0;
end
end
4'd2:begin
mux_status_done<=1'd0;
if(spi_clk==1'd1)begin
cnt<=cnt+5'd1;
end
else if(cnt==5'd15) begin//16个clk(输出8指令+输入8数据)
spi_din<=1'd0;
cnt<=5'd0;
send_data<=8'd0;
state<=4'd3;
end
else if(cnt>=5'd7)begin//开始接收数据时
spi_din<=send_data[7];
send_data<={send_data[6:0],send_data[7]};
end
end
4'd3:begin
if(!mux_status)begin//通讯结束
state<=4'd4;
mux_status_done<=1'd1;
end
else begin
state<=4'd3;
mux_status_done<=1'd0;
end
end
4'd4:begin
state<=4'd0;
mux_status_done<=1'd0;
end
endcase
end
end
endmodule仿真结果如下:

flash擦除
擦除分为扇区擦除;32KB擦除;64KB擦除;整片擦除
在擦除之前必须执行写使能命令,除整片擦除外,它们的时序图都是先发送8bit命令代码,再发送24bit地址:

整片擦除,只需要发送8bit命令代码,无需发送24bit地址(因为全擦除成1了)
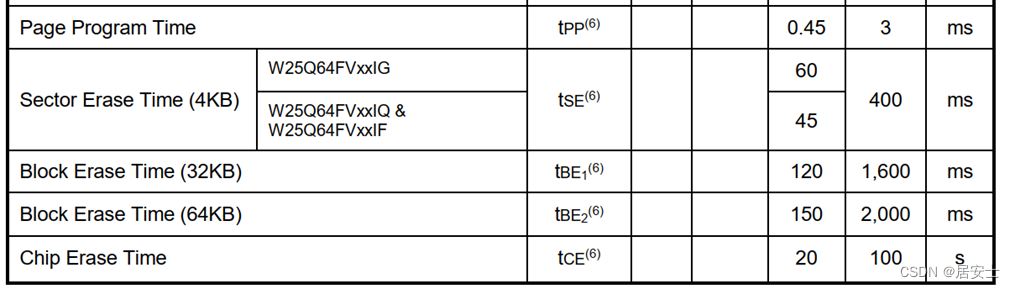 根据数据手册,擦除不同大小的区域,根据不同的擦除指令,需要延时不同时间
根据数据手册,擦除不同大小的区域,根据不同的擦除指令,需要延时不同时间
1 TSE(擦除扇区) 400ms
2 TE32K(擦除32KB) 1600ms
3 TE64K(擦除64KB) 2000ms
4 TCE(擦除整块) 100s
5 Tpage(页写) 3ms
因此,需要首先编写擦除延时代码,(由于页写也需要延时,因此放在一起)产生上述5个延时完成的信号,代码如下:
module erase_time(
input clk,
input reset,
input write_en,//页写计时
input erase_en,//擦除计时
input [2:0]erase_cmd,//擦除模式选择
output reg time_done
);
reg [2:0] time_mode;//计时模式(4擦除or页写,一共5种)
reg [31:0]time_cnt ;//擦整片最多100s
reg [31:0]time_max ;//计时最大值
reg [3:0]state;
parameter TSE=20 ;
parameter TE32K=80 ;
parameter TE64K=100;
parameter TCE=1000 ;
parameter Tpage=15 ;
always@(posedge clk)begin
if(reset)begin
time_done<=1'd0;
time_cnt<=32'd0;
time_max<=32'd0;
time_mode<=3'd0;
state<=4'd0;
end
else begin
case(state)
4'd0:begin
if(write_en)begin
time_mode<=3'd5;
state<=4'd1;
end
else if(erase_en)begin
time_mode<=erase_cmd;//输入的擦除模式
state<=4'd1;
end
else begin
state<=4'd0;
end
end
4'd1:begin
case(time_mode)//根据不同模式分配计数最大值
3'd1:time_max<=TSE;
3'd2:time_max<=TE32K;
3'd3:time_max<=TE64K;
3'd4:time_max<=TCE;
3'd5:time_max<=Tpage;
endcase
state<=4'd2;
end
4'd2:begin
if(time_max==time_cnt)begin//计数值++
time_cnt<=32'd0;
state<=4'd3;
end
else begin
state<=4'd2;
time_cnt<=time_cnt+32'd1;
end
end
4'd3:begin
time_done<=1'd1;
state<=4'd0;
end
endcase
end
end
endmodule接下来写擦除代码,擦除模块框图如下:
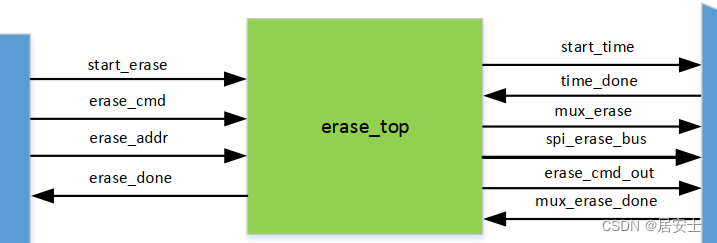
| 名称 |
输入输出 |
位宽 |
解释 |
| start_erase |
input |
1 |
启动擦除模块 |
| erase_cmd |
input |
3 |
擦除命令(4种擦除模式) |
| erase_addr |
input |
24 |
擦除地址 |
| mux_erase_done |
input |
1 |
总线应答 |
| mux_erase |
output |
1 |
请求总线 |
| erase_done |
output |
1 |
擦除完成 |
| start_time |
output |
1 |
启动擦除计时 |
| time_done |
input |
1 |
擦除计时完成 |
| erase_cmd_out |
output |
3 |
擦除指令确定计时器计 |
| spi_cs |
output |
1 |
spi片选线 |
| spi_clk |
output |
1 |
spi时钟线 |
| spi_dout |
output |
1 |
spi输出线 |
擦除流程图如下:
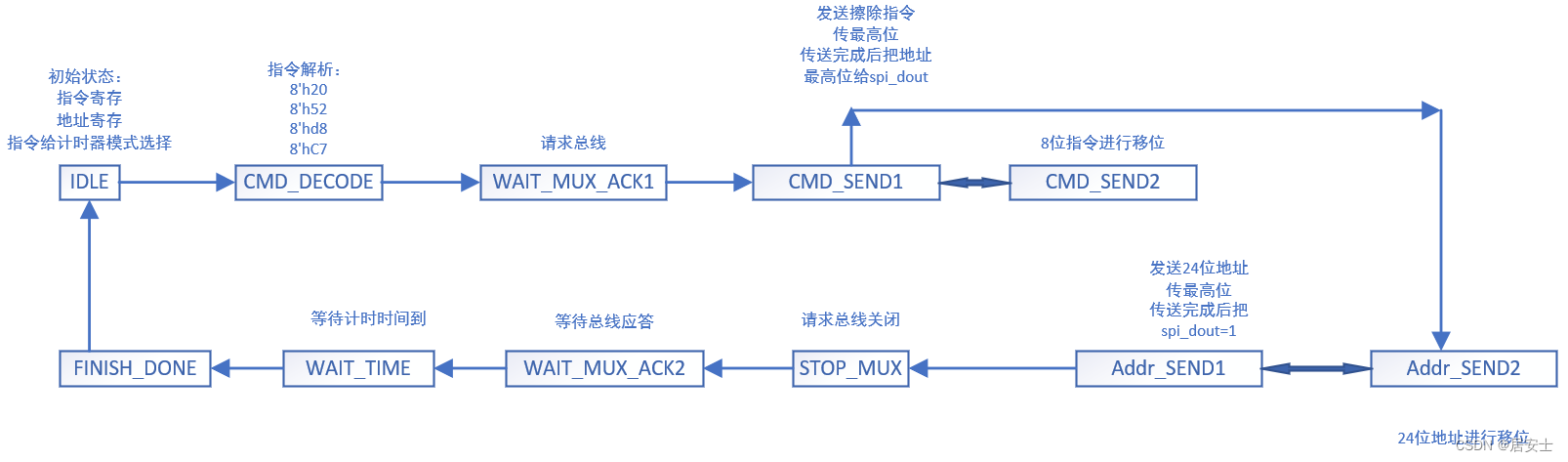
擦除过程:
0(初始状态):把页写突发长度和页写地址寄存
1(指令解析):把02h给指令寄存器
2(请求总线):请求打开总线
3(发送指令1):把指令最高位给spi_dout,移完8位把地址最高位给spi_dout
4(发送指令2):移位8位指令
5(发送地址1):把地址最高位给spi_dout,移完24位把数据最高位给spi_dout
6(发送地址2):移位24位地址
7(计数发送数据):判断cnt_byte是否等于突发长度
8(停止):请求总线停止
module erase_top(
input clk,
input reset,
input start_erase ,
input [2:0] erase_cmd ,//擦除指令(1234)
input [23:0]erase_addr ,//擦除地址
input mux_erase_done ,//擦除总线ack
input time_done ,//计时完成
output reg mux_erase ,//擦除总线请求
output reg spi_cs ,
output reg spi_clk ,
output reg spi_dout ,
output reg erase_done,//擦除完成
output reg erase_en
);
erase_time inst_erase_time(
.clk (clk),
.reset (reset),
.write_en (),//页写计时
.erase_en (erase_en),//擦除计时
.erase_cmd(erase_cmd),//擦除模式选择
.time_done(time_done)
);
reg [5:0] cnt;
reg[7:0] valid_cmd ;//8位指令寄存器
reg[2:0] erase_cmd_reg ; //指令寄存
reg[23:0]erase_addr_reg; //地址寄存
reg [3:0] state;
always@(posedge clk)begin
if(reset)begin
mux_erase <=1'd0;
spi_cs <=1'd1;
spi_clk <=1'd0;
spi_dout <=1'd1;
erase_done<=1'd0;
cnt <=6'd0;
valid_cmd <=8'd0;
erase_cmd_reg <=3'd0;
erase_addr_reg<=24'd0;
erase_en <=1'd0;
state<=4'd0;
end
else begin
case(state)
4'd0:begin
if(start_erase)begin
erase_cmd_reg<=erase_cmd;
erase_addr_reg<=erase_addr;
state<=4'd1;
end
else begin
state<=4'd0;
end
end
4'd1:begin
case(erase_cmd_reg)//指令1234对应的8位命令
3'D1: valid_cmd <= 8'h20;
3'D2: valid_cmd <= 8'h52;
3'D3: valid_cmd <= 8'hd8;
3'D4: valid_cmd <= 8'hC7;
endcase
state<=4'd2;
end
4'd2:begin
mux_erase<=1'd1;
if(mux_erase_done)begin
state<=4'd3;
erase_en<=1'd1;//与总线请求通讯后开始计时
end
else begin
state<=4'd2;
end
end
4'd3:begin
erase_en<=1'd0;
if(cnt==6'd8)begin
cnt<=6'd0;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=1'd1;
state<=4'd6;
end
else begin
cnt<=cnt+6'd1;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=valid_cmd[7];
state<=4'd4;
end
end
4'd4:begin
spi_cs <=1'd0;
spi_clk <=1'd1;
valid_cmd<={valid_cmd[6:0],valid_cmd[7]};
state<=4'd3;
end
4'd5:begin
if(cnt==6'd23)begin
cnt<=6'd0;
spi_cs <=1'd1;
spi_clk <=1'd0;
spi_dout <=erase_addr_reg[23];
state<=4'd7;
end
else begin
cnt<=cnt+6'd1;
spi_cs <=1'd0;
spi_clk <=1'd0;
spi_dout <=erase_addr_reg[23];
state<=4'd6;
end
end
4'd6:begin
spi_cs <=1'd0;
spi_clk <=1'd1;
erase_addr_reg<={erase_addr_reg[22:0],1'b0};
state<=4'd5;
end
4'd7:begin
mux_erase<=1'd1;
state<=4'd8;
end
4'd8:begin
if(mux_erase_done)begin
state<=4'd9;
end
else begin
state<=4'd8;
end
end
4'd9:begin
if(time_done)begin//延时的时间到了
state<=4'd10;
end
else begin
state<=4'd9;
end
end
4'd10:begin
erase_done<=1'd0;
state<=4'd0;
end
endcase
end
end
endmodule编写仿真TB代码:
module TB_erase_top(
);
reg clk ;
reg reset ;
reg start_erase ;
reg [2:0] erase_cmd ;//擦除指令
reg [23:0]erase_addr ;//擦除地址
reg mux_erase_done ;
wire time_done ;//计时完成
wire mux_erase ;
wire spi_cs ;
wire spi_clk ;
wire spi_dout ;
wire erase_done;
wire erase_en;
erase_top erase_top(
.clk (clk) ,
.reset (reset) ,
.start_erase (start_erase) ,
.erase_cmd (erase_cmd) ,//擦除指令
.erase_addr (erase_addr) ,//擦除地址
.mux_erase_done (mux_erase_done) ,
.time_done (time_done) ,//计时完成
.mux_erase (mux_erase) ,
.spi_cs (spi_cs) ,
.spi_clk (spi_clk) ,
.spi_dout (spi_dout) ,
.erase_done (erase_done) ,
.erase_en (erase_en)
);
initial begin
clk =0;
reset =1;
start_erase =0; //擦除启动信号
erase_cmd =0; //擦除命令数据2位
erase_addr =0; //擦除地址
#1000;
reset =0;
#1000;
start_erase =1; //擦除启动信号
erase_cmd =1; //擦除命令数据2位
erase_addr =24'haaaa55; //擦除地址
#40;
start_erase =0; //擦除启动信号
erase_cmd =0; //擦除命令数据2位
erase_addr =0; //擦除地址
end
always #20 clk= ~clk;
reg [2:0] state;
always @(posedge clk)begin
if(reset)begin
state <= 3'd0;
mux_erase_done<=1'b0;
end
else begin
case (state)
3'd0:begin
if(mux_erase)begin
state <= 3'd1;
mux_erase_done<=1'b1;
end
else begin
state <= 3'd0;
mux_erase_done<=1'b0;
end
end
3'd1:begin
state <= 3'd2;
mux_erase_done<=1'b0;
end
3'd2:begin
if(!mux_erase)begin
state <= 3'd3;
mux_erase_done<=1'b1;
end
else begin
state <= 3'd2;
mux_erase_done<=1'b0;
end
end
3'd3:begin
mux_erase_done<=1'b0;
state <= 3'd0;
end
default :state <= 3'd0;
endcase
end
end
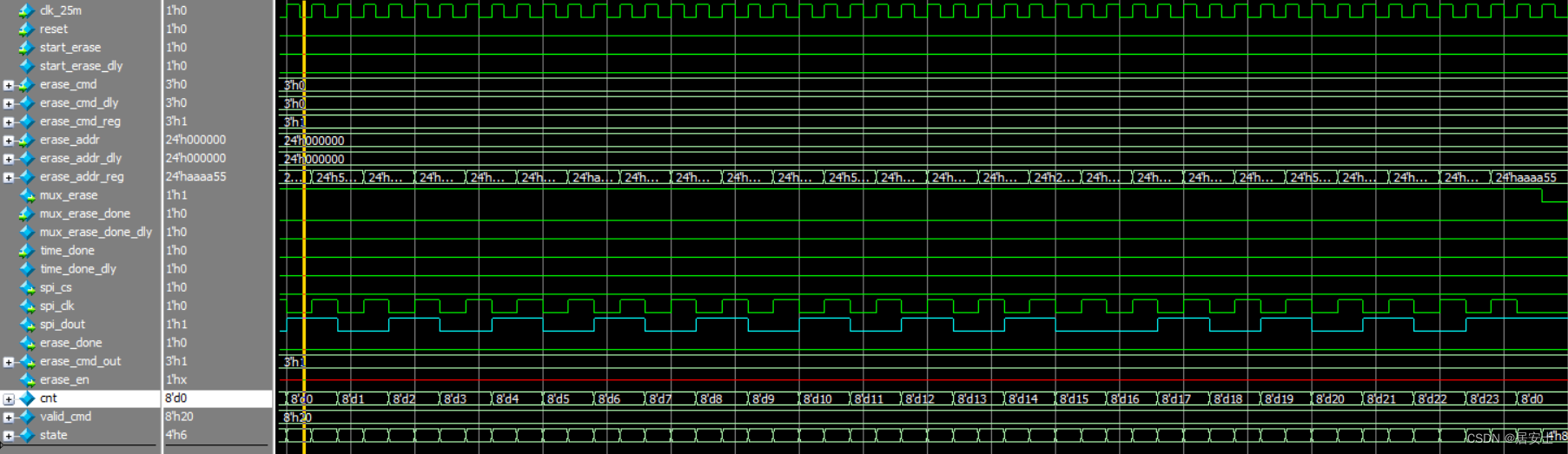
endmodule仿真图如下:

传擦除模式1(02h)指令
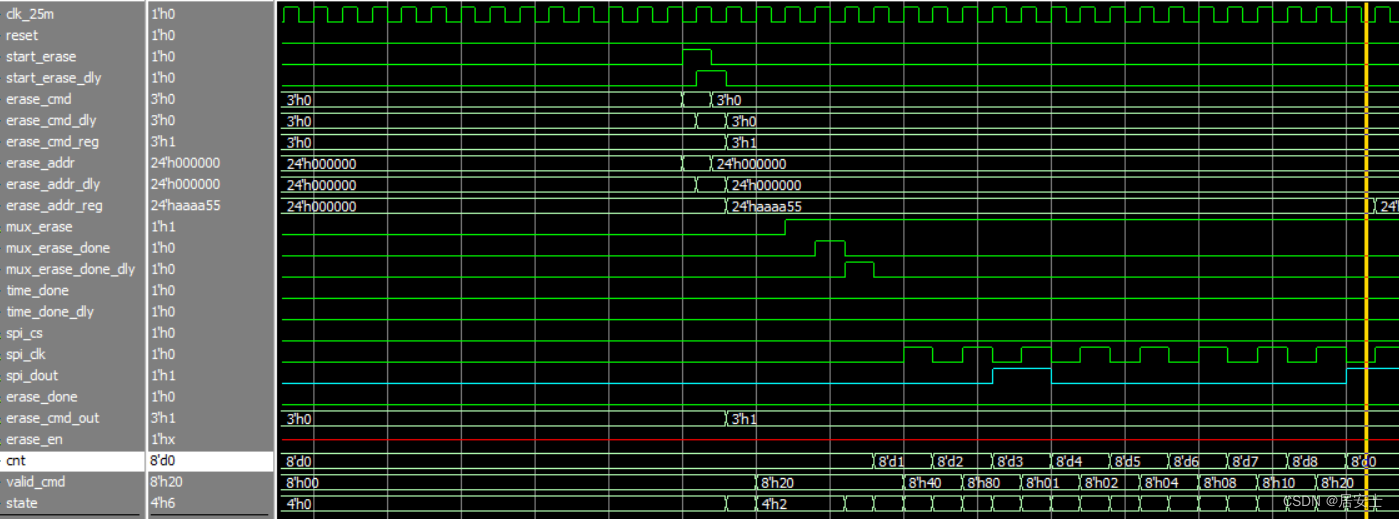
传擦除地址