一、时隔一个月,再次记录激光雷达的使用,一个月不碰生疏了好多,如鲠在喉,先来个基本操作熟悉一下找找感觉。
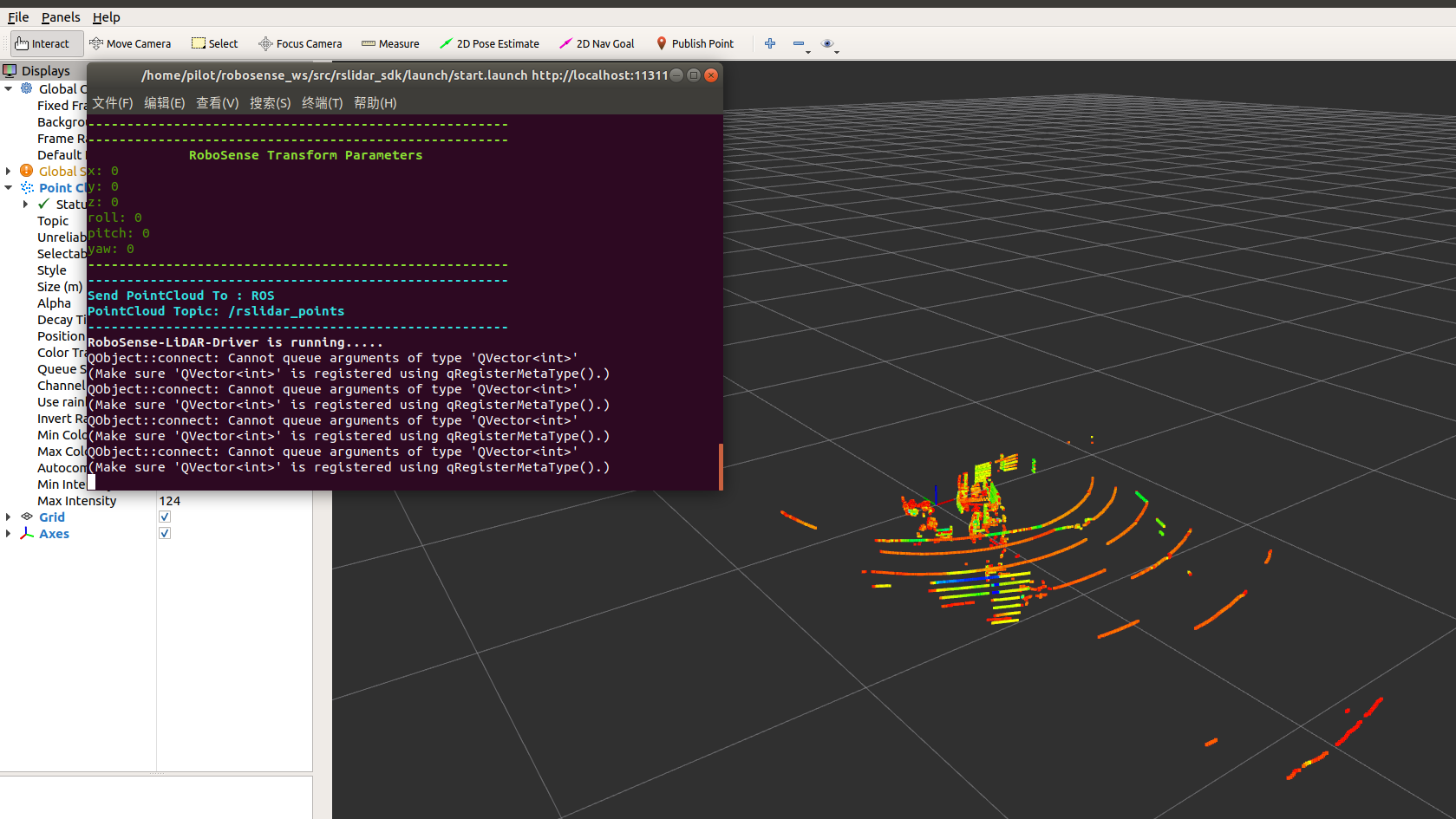
连接在线雷达:
配置config.yaml文件
使用ros-catkin编译:
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/README_CN.md
catkin_make
source devel/setup.bash
roslaunch rslidar_sdk start.launch
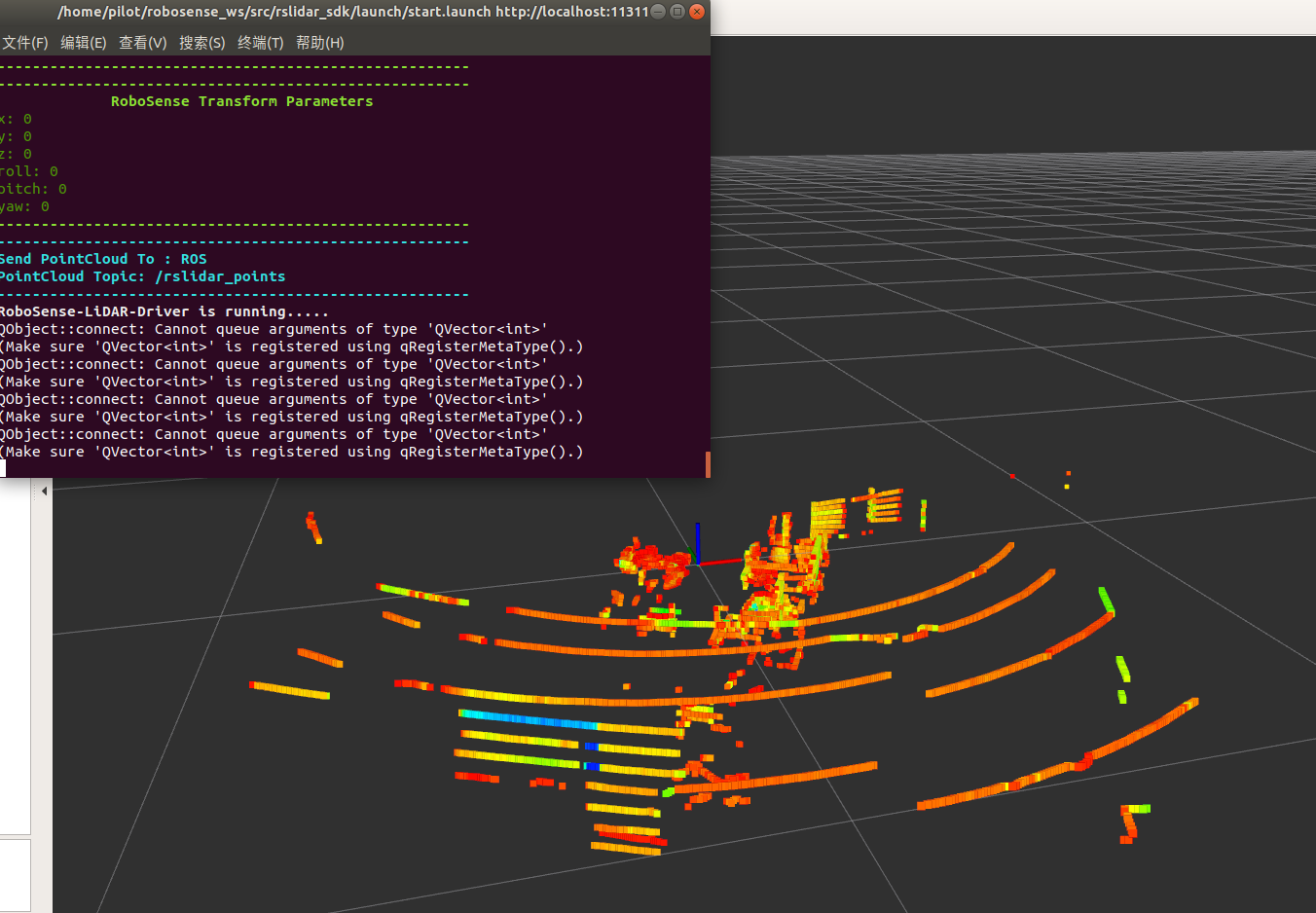
二、改变点类型的定义
https://github.com/RoboSense-LiDAR/rslidar_sdk/blob/main/doc/howto/05_how_to_change_point_type_CN.md
在CMakeLists.txt文件中设置POINT_TYPE
#set point_type
#=======================================
# Custom Point Type (XYZI, XYZIRT)
#=======================================
set(POINT_TYPE XYZI/XYZIRT)
分别设置两种类型,看效果区别不大,和之前相比感觉变化也不大
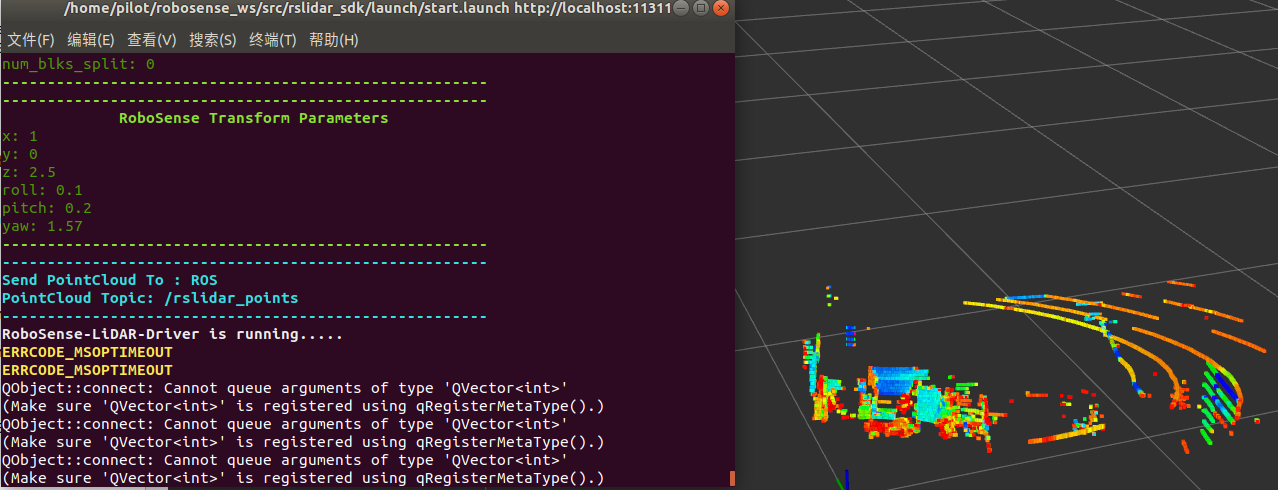
三、使用坐标变换功能
安装依赖库;选择对应编译方式;设置参数;
四、在线雷达高级主题和PCA文件高级主题只是了解没有实操。