1. Создайте пакет о сообщении в рабочей области;
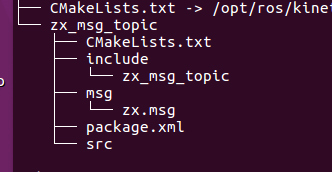
MkDir -p ~ / catkin_ws / ЦСИ кд ЦСИ catkin_create_pkg msg_topic roscpp rospy std_msgs message_generation message_runtime кд msg_topic MkDir тзд // тзд здесь, чтобы создать папку для сохранения файла в сообщение здесь, в противном случае он не будет найти файл
2. Изменить пакет сообщения CMakeLists.txt файл:
cmake_minimum_required (версия 2.8.3)
проект (zx_msg_topic)
find_package (сережка Необходимые компоненты
message_generation
message_runtime
roscpp
rospy
std_msgs
)
add_message_files (
FILES
Имя файла .MSG сообщение
)
generate_messages (
ЗАВИСИМОСТИ
std_msgs
)
catkin_package (
# INCLUDE_DIRS включают
Новости Имя пакета БИБЛИОТЕКА msg_topic создана //
CATKIN_DEPENDS message_generation message_runtime roscpp rospy std_msgs
# ЗАВИСИТ system_lib
)
include_directories (
# включают
$ {catkin_INCLUDE_DIRS}
)
3. Изменить package.xml файл:
<Exec_depend> message_generation </ exec_depend> <Build_depend> message_runtime </ build_depend>
4, выполните следующую команду, чтобы определить, следует ли создавать успешные типы сообщений
rosmsg шоу msg_topic / .msg имя файла сообщения