多机器人系统故障检测与诊断综述
今天阅读了《Fault Detection and Diagnosis in Multi-Robot Systems: A Survey》,这篇文章主要综述了针对多机器人系统(MRS)的Fault Detection and Diagnosis(故障检测与诊断,FDD)的研究。作者描述了MRS的不同属性如何对FDD提出不同的挑战。针对这些挑战,调查了适用于MRS的不同FDD方法,最后描述了该领域的研究机会。该文DOI号为doi:10.3390/s19184019,发表于2019年的Senors,值得对该领域有兴趣的同学一读。
个人是比较关注群体机器人故障或者异常的检测,尤其是分布式、多任务背景下的,目前的解决方式还是以共识为主,如果大家有什么好的经验,也欢迎私信我或者评论交流
FDD对MRS的挑战
FDD对MRS的挑战包括几个方面。
1、全局系统知识依赖于个体机器人的局部信念(从他们的传感器获得)。FDD机制被期望识别出知识的不一致性,并将其与单个故障机器人相关联。
2、全局决策过程和全局多机器人方案的建立可能导致方案的错误,即方案的某些步骤是错误的。预计FDD机制将确定这些步骤。
3、机器人在支持全局努力的情况下,导出自己的局部计划,然后,机器人协调它们的执行。FDD机制期望监视MRS计划的执行,并诊断本地计划、协调或本地操作是否是错误执行的根源。
4、在对单个机器人进行识别之后,期望一个完整的FDD机构来诊断机器人的故障部件。
作者主要针对来自MRS两个方面属性的挑战:1、协作程度;2、MRS规模。
影响FDD的MRS要素分析
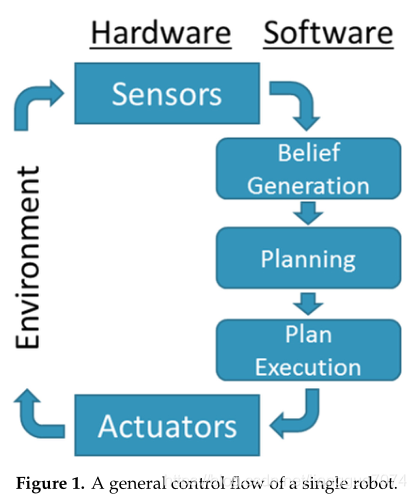
对于一个机器人来说,很简单,感知-思考-运动,任何一个图中的部件发生故障都会打破机器人行动的正常循环,从而带来任务失败的后果。目前FDD在单个机器人方面的难度主要由以下几个要素决定:1、通用程度;2、自治程度;3、复杂程度;4、与环境的交互程度。
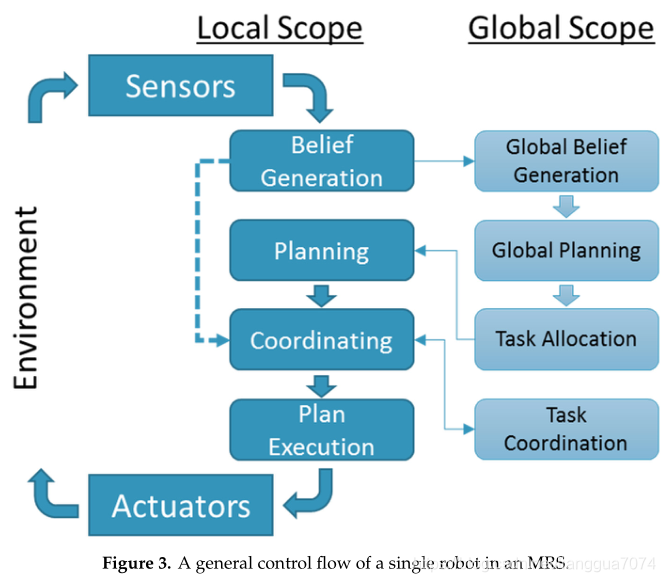
现有的MRS体系结构主要关注任务分配机制、分布式资源共享和管理,或协调机制。每一个机器人都能感知其所在的环境并产生个人的信念。这些信念被传递到全球范围,用于全球信念的生成。 单个机器人可能不知道其他人的当地信仰。此外,个别机器人可能无法传达他们所有的信仰。全球信念生成必须收集当地的信念,评估MRS是否已经感知到它所需要的一切,并对机器人的感知是否真实进行推理。
这些本地和全局活动中的每一个都可能遭受不同的错误,而这些错误又反过来扰乱了整个MRS。MRS的协作、协调、通信、大小、冗余和其他属性方面的程度不同,这对FDD的影响也不同。(具体细节文中有较为详细的交代,请移步原文)
作者对计划相关故障诊断、协调故障诊断、MRS体系中的错误诊断、群的FDD,这里面我对最后一项尤为感兴趣,也推荐大家去看看。处理这些不同方面的不同方法取决于预先存在的知识,例如全球计划、对队友信念的部分观察、共享。
未来的研究机会
对于未来可能的研究机会,作者总结如下:1、FDD for an ad hoc team of robots;2、FDD for MRS development time;3、FDD for improved performance of an MRS;4、FDD for an MRS comprised of a team and a swarm。