官方代码地址
https://github.com/UZ-SLAMLab/ORB_SLAM3
开始编译
~/projects/ORB_SLAM3$ ./build.sh
 DBow2编译成功,但是g2o编译不成功
DBow2编译成功,但是g2o编译不成功
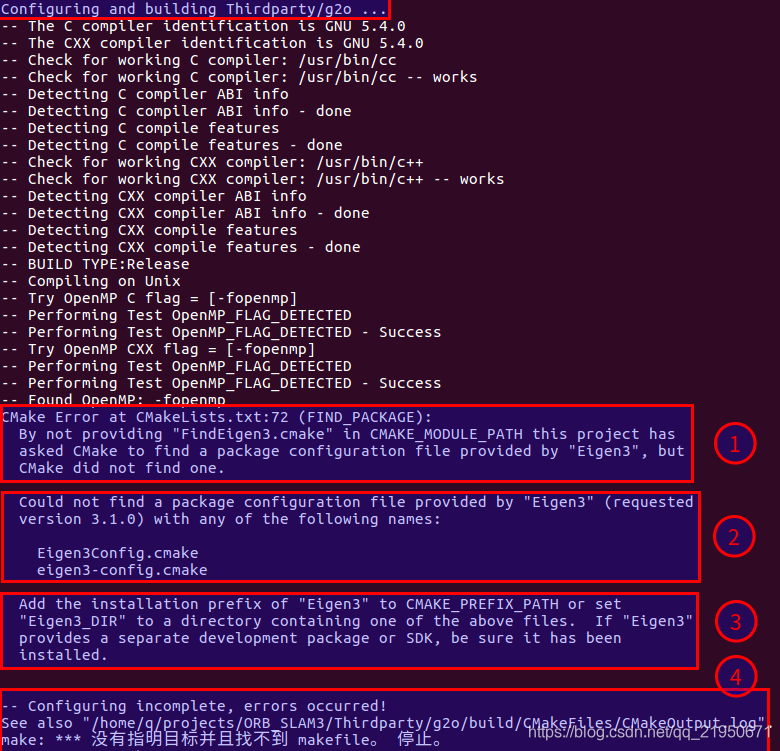 根据报错信息分析问题出在了哪里
根据报错信息分析问题出在了哪里
CMake Error at CMakeLists.txt:72 (FIND_PACKAGE):
By not providing "FindEigen3.cmake" in CMAKE_MODULE_PATH
this project has asked CMake to find a package configuration file provided by "Eigen3",
but CMake did not find one.
寻找一下FindEigen3.cmake在哪里
locate FindEigen3.cmake

打开看看
gedit /home/eigen-3.2.10/cmake/FindEigen3.cmake
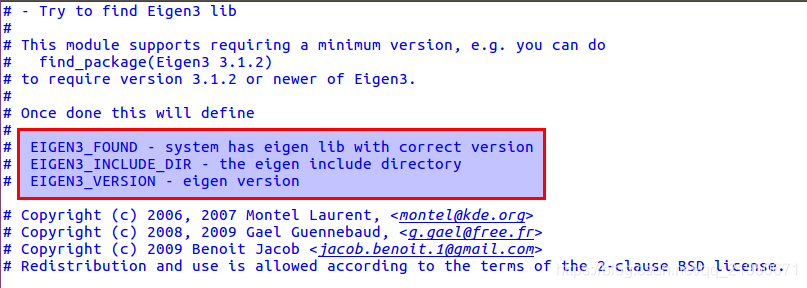
# EIGEN3_FOUND - system has eigen lib with correct version
# EIGEN3_INCLUDE_DIR - the eigen include directory
# EIGEN3_VERSION - eigen version
意思就是这个.cmake文件会找到第三方库的头文件,库文件,Eigen没有库文件
我们再看看OpenCV的
# LIBOPENCV_FOUND - system has LIBOPENCV
# LIBOPENCV_INCLUDE_DIR - the LIBOPENCV include directories
# LIBOPENCV_LIBRARIES - link these to use LIBOPENCV
打开g2o下面的CMakeLists.txt
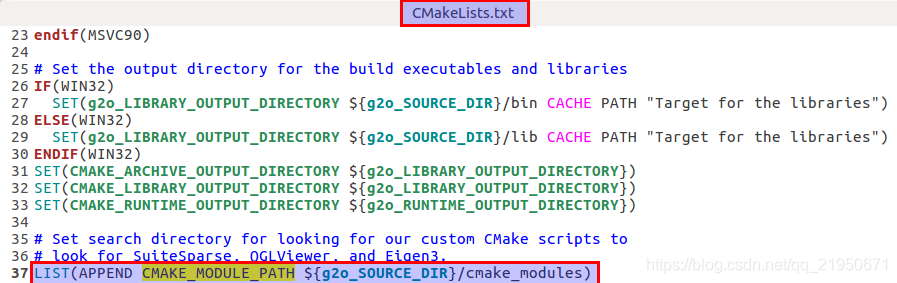 发现这里有这个路径
发现这里有这个路径
LIST(APPEND CMAKE_MODULE_PATH ${g2o_SOURCE_DIR}/cmake_modules)
然后实际上下载的代码是没有的所以可以把ORB_SLAM2的拷贝过来或者是给出gedit /home/packages/eigen-3.2.10/cmake/FindEigen3.cmake
这个路径,所以官方这么做肯定是有原因的,所以执行第二个方案。
补充一下这个set命令用法
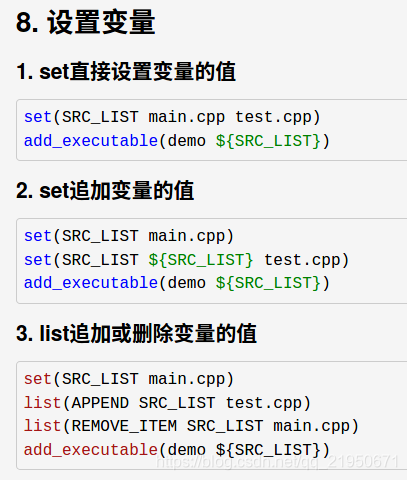
cmake你不用找了,我给你eigen头文件路径
先找到eigen3的路径
locate
/usr/local/include/eigen3
然后添加
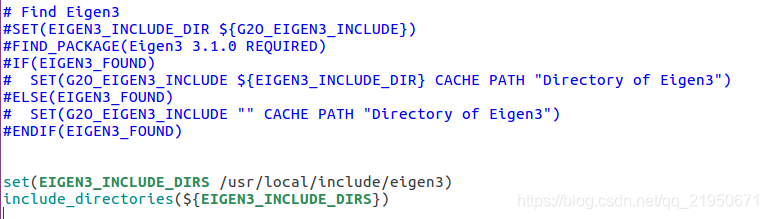
set(EIGEN3_INCLUDE_DIRS /usr/local/include/eigen3)
include_directories(${EIGEN3_INCLUDE_DIRS})
把之前的一坨都删掉,换成下面的这个
然后就可以顺利编译通过了
然后在编译build_ros.sh的时候出错了
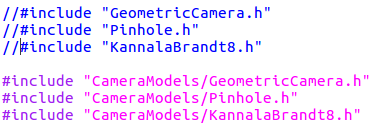
/ORB_SLAM3/Examples/ROS/ORB_SLAM3/../../../include/KeyFrame.h:32:29: fatal error: GeometricCamera.h: 没有那个文件或目录
打开文件,作如下更改就好了,因为官方多了一层目录

依次做如下更改

接着编译 结果又报错了
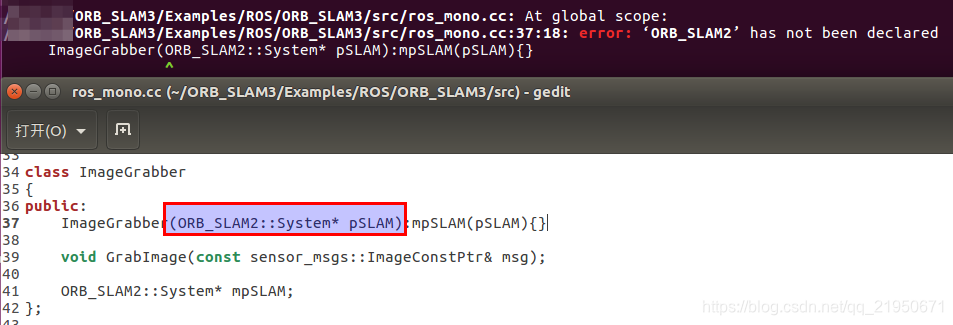
/ORB_SLAM3/Examples/ROS/ORB_SLAM3/src/ros_mono.cc:37:18:
error: ‘ORB_SLAM2’ has not been declared
ImageGrabber(ORB_SLAM2::System* pSLAM):mpSLAM(pSLAM){}
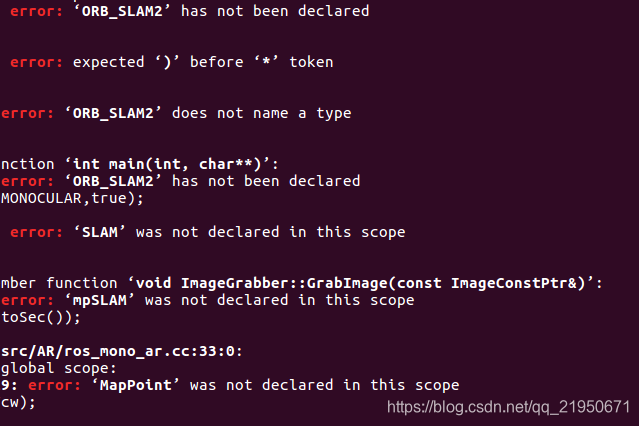 我们打开代码看到是代码还用了ORB_SLAM2,所以开始更改
我们打开代码看到是代码还用了ORB_SLAM2,所以开始更改
不过我不想一个个更改,下面放出大招
sed -i "s/ORB_SLAM2/ORB_SLAM3/g" `grep -rl "ORB_SLAM2"`
解释一下grep和sed替换文件中的字符串命令
sed -i s/"str1"/"str2"/g `grep "str1" -rl --include="*.[ch]" ./`
将当前目录下的所有.c、.h文件中的str1字符串替换为str2字符串。
参数解释:
sed:
-i 表示操作的是文件,"`` "括起来的grep命令,表示将grep命令的的结果作为操作文件
s/"str1"/"str2"/表示查找str1并替换为str2,后面跟g表示一行中有多个str1的时候,都替换,而不是仅替换第一个
grep:
-r表示查找当前目录以及所有子目录
-l表示仅列出符合条件的文件名,传给sed命令做替换操作
--include="*.[ch]" 表示仅查找.c、.h文件
注:如果不需要查找子目录,仅需要在当前目录替换,可直接用sed命令:
sed -i s/"str1"/"str2"/g ./*.[ch]
继续编译有报错了
/usr/bin/ld: CMakeFiles/RGBD.dir/src/ros_rgbd.cc.o: undefined reference to symbol '_ZN5boost6system15system_categoryEv'
打开这个文件:
ORB_SLAM3/Examples/ROS/ORB_SLAM3/CMakeLists.txt
添加代码

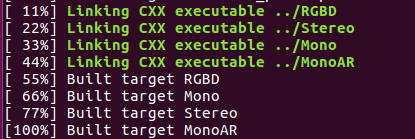
编译成功
下载的是这两个数据集开始测试
把这个数据集的路径填写到下面这个文件 tum_vi_examples.sh
 在终端运行脚本
在终端运行脚本 tum_vi_examples.sh

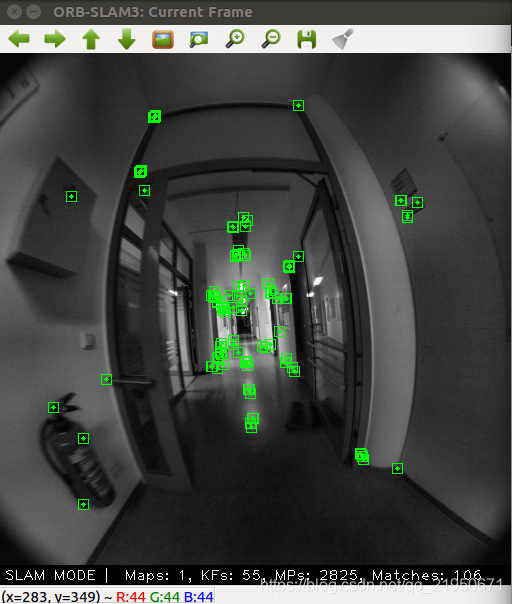
运行结果截图

欢迎关注公众号小秋SLAM笔记回复"ORB_SLAM3"获取我下载好的官方论文、测试视频、数据集。