ros-app下载以及使用注意事项
声明:这里的资源分享仅供学习使用,如有侵犯原创利益,望谅解。
使用ros的手机app连接机器人ros_master进行对机器人控制,摄像头视频显示,地图显示,设定初始点和导航目标点等功能,都极大地方便了我们的学习和调试工作。虽然一些开源作者也提供了源码,对于一般的ROS机器人学习人员,没有必要花一些时间进行环境搭建,源码编译(本人尝试过,有很多问题),所以下载一个ros app成为了我们的首选。但是,网上提供的比较单一,而且没有更加细节的解释,并且混杂着一些不能使用的。这里作者整理了几款不同的ros app 方便大家下载使用。
关于软件分类:主要有下面几个分类:
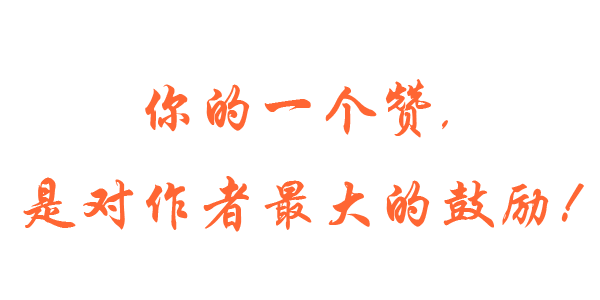
(1)ROS机器人摇杆控制+摄像头显示
(2)ROS机器人摇杆控制+摄像头显示+地图显示

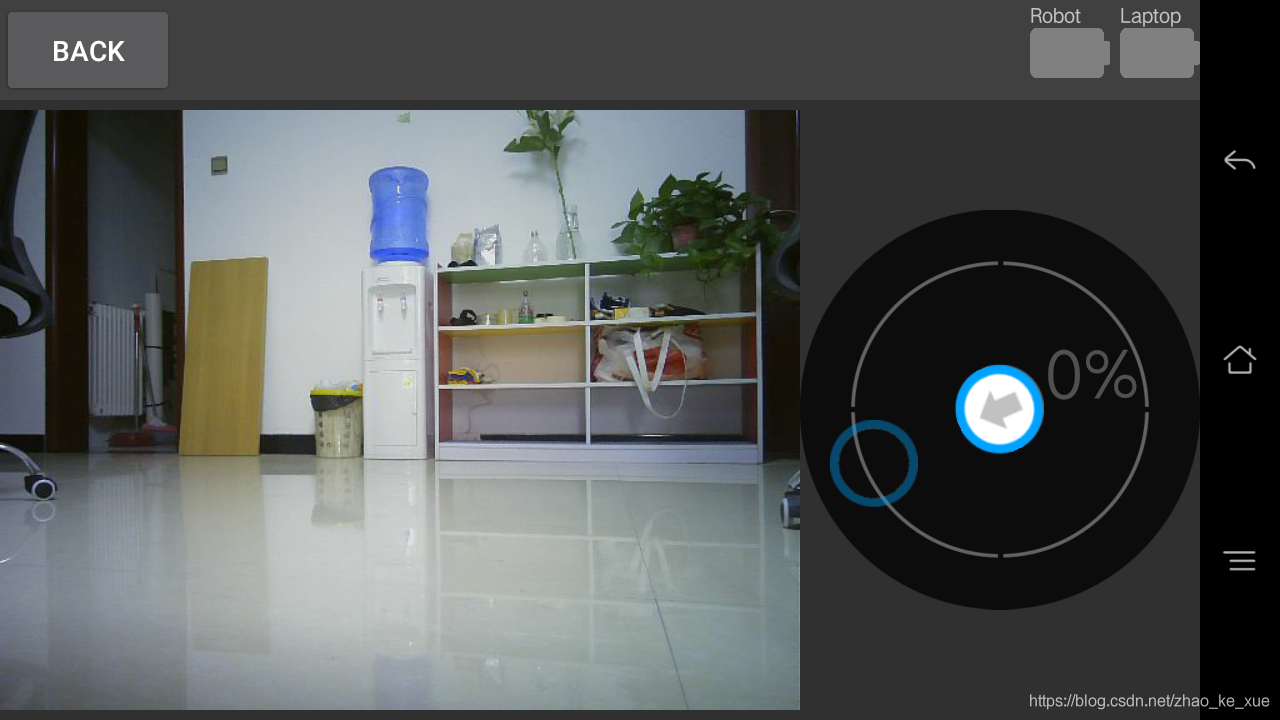
(3)ROS机器人摇杆控制+摄像头显示+地图显示+设定导航目标
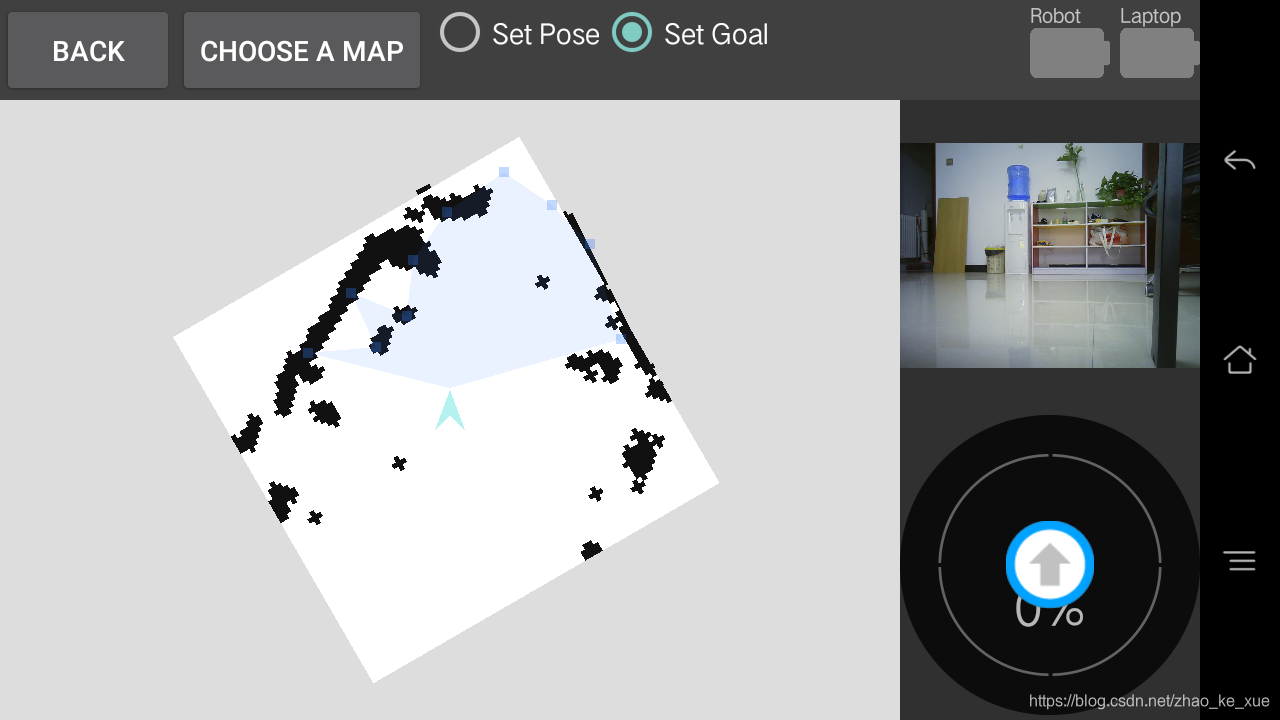
(4)ROS机器人多种方式控制+摄像头显示+雷达点云显示+碰撞警告

(5)ROS机器人多种方式控制+摄像头显示+地图显示+速度显示+碰撞警告
关于使用注意事项:
usb_cam功能包+视频压缩插件默认产生的视频压缩话题为
/usb_cam/image_raw/compressed
若启动usb_cam没有产生/usb_cam/image_raw/compressed,(通过rostopic list 查看),则需要安装视频压缩功能包
依次在终端执行如下命令
sudo apt-get install ros-kinetic-image-transport
sudo apt-get install ros-kinetic-image-transport-plugins
软件(1)(2)(3)订阅的视频topic是:/compressed_image
解决方法:
在usb_cam.launch中添加话题映射
添加后文件如下:
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
<remap from="/usb_cam/image_raw/compressed" to="/compressed_image"/>
</node>
</launch>
软件(4)订阅的图像话题是:/image_raw/compressed
解决方法同上,添加后文件如下:
<launch>
<node name="usb_cam" pkg="usb_cam" type="usb_cam_node" output="screen" >
<param name="video_device" value="/dev/video1" />
<param name="image_width" value="640" />
<param name="image_height" value="480" />
<param name="pixel_format" value="yuyv" />
<param name="camera_frame_id" value="usb_cam" />
<param name="io_method" value="mmap"/>
<remap from="/usb_cam/image_raw/compressed" to="/image_raw/compressed"/>
</node>
</launch>
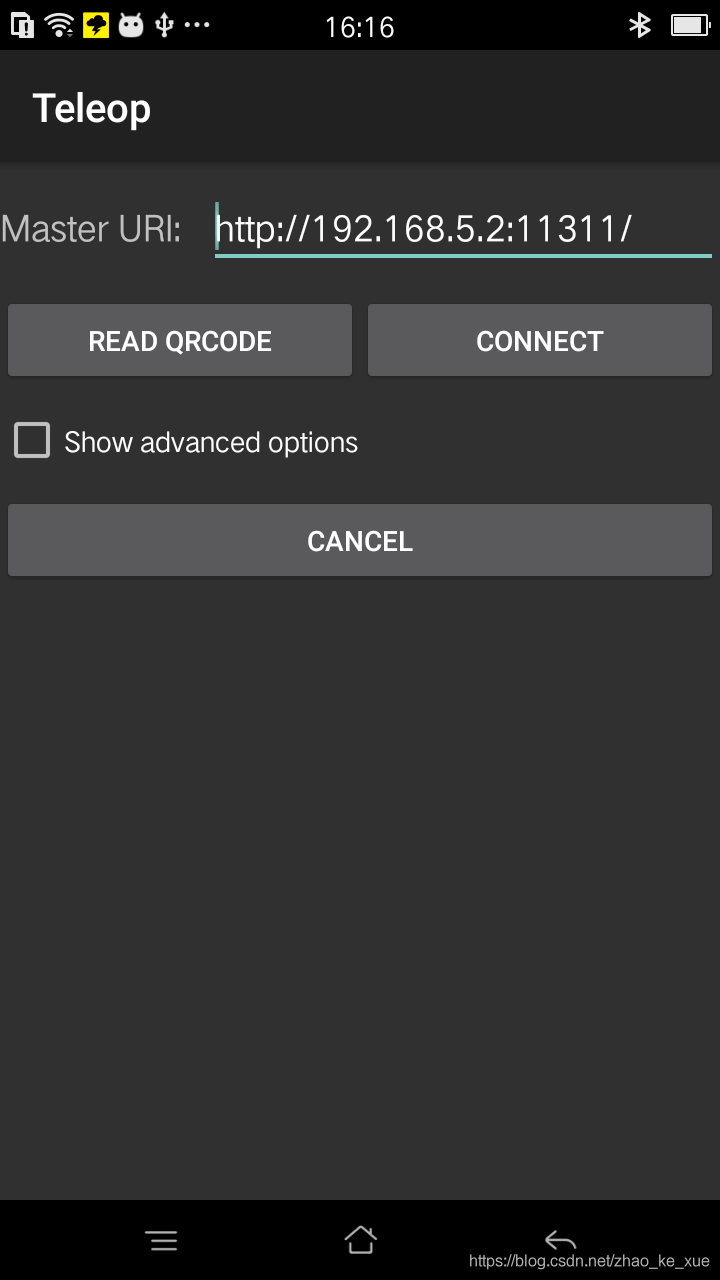
关于ros android app的首次使用,首次使用需要填入自己机器人master的IP,如下
关于ros app的下载:
在公众号:小白学移动机器人,发送:app,即可获得下载链接。
关于整理收集分享:
如果小伙伴们,还有更好用的ros app 希望可以给我留言分享,我一并整理分享给大家。