一、简介
1 蚁群算法的提出
蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来寻找优化路径的机率型算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。遗传算法在模式识别、神经网络、机器学习、工业优化控制、自适应控制、生物科学、社会科学等方面都得到应用。
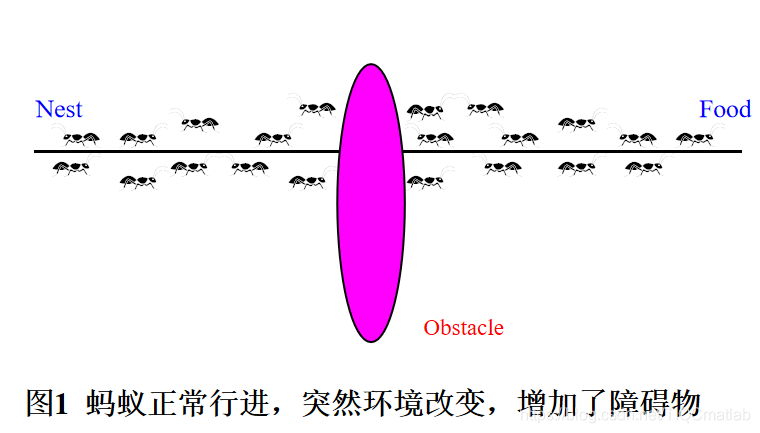
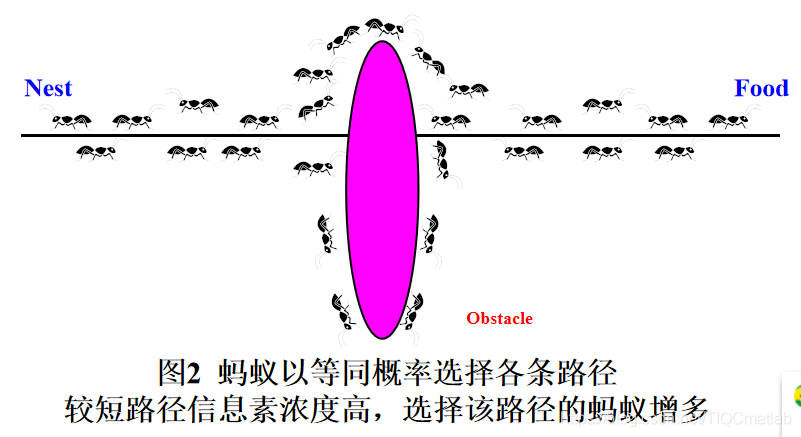
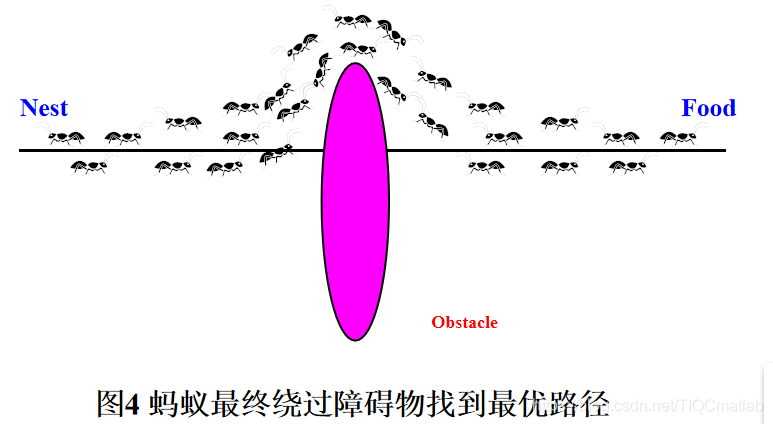
2 算法的基本原理
二、源代码
%%%%%%%%%% 问题定义:获取城市位置坐标、计算距离矩阵 %%%%%%%%%
InitOps=[];
[Location,DistMatrix,Ncities,Bestx,Lengx] = pr76init(InitOps);
close all;
figure (1);
hold on;
minx=min(DistMatrix(:,1));
maxx=max(DistMatrix(:,1));
miny=min(DistMatrix(:,2));
maxy=max(DistMatrix(:,2));
minm=min(minx,miny);
maxm=max(maxx,maxy);
l=(maxm-minm)/10;
for i=1:Ncities
plot(Location(i,1),Location(i,2),'*b');
text (Location(i,1)+l,Location(i,2)+l,num2str(i));
end
for i=1:Ncities-1
line([Location(Bestx(i),1),Location(Bestx(i+1),1)] , [Location(Bestx(i),2),Location(Bestx(i+1),2)]) ;
end
line([Location(Bestx(1),1),Location(Bestx(Ncities),1)] , [Location(Bestx(1),2),Location(Bestx(Ncities),2)]) ;
grid on,title(['初始路线图-',num2str(Lengx)]),xlabel('横坐标'),ylabel('纵坐标');
legend('城市位置');
hold off ;
% 初始化随机发生器状态
rand('state',sum(100*clock));
% ================================================
% 使用最近邻法构造一个初始游历,并据此计算信息系初值
p=zeros(1,Ncities+1);
p(1)=round(Ncities*rand+0.5);% p存储目前找到的所有城市的编号
i=p(1);
count=2;
while count <= Ncities
NNdist= inf ;%NNdist存储目前找到的和当前城市距离最短的城市的距离
pp= i ;% i存储当前城市的编号 pp存储目前找到的城市编号
for j= 1: Ncities
if (DistMatrix(i, j) < NNdist) & (j~=i) & ((j~=p) == ones(1,length(p)))
% 目标城市的要求为--距离短、且不能是当前城市,也不能是以前已经走过的城市
NNdist= DistMatrix(i, j) ;
pp= j ;
end
end
p(count)=pp;
i= pp ;
count= count + 1 ;
end
p=AcatspEval(p,DistMatrix,Ncities);
len=p(1,Ncities+1);
Q0=1/(Ncities*len);
%%%%%%%%%% 设定系统有关参数 %%%%%%%%%%
MaxNc=5000;% 最大代数
A=1;% 信息素因子
B=2;% 启发信息因子
P1=0.1;% 局部挥发系数初值
P2=0.1;% 全局挥发系数初值
R0=0.9; %选择概率
M=10;% 蚂蚁数量
%%%%%%%%%% 初始化信息素、启发信息矩阵、确定蚂蚁最初位置及允许矩阵 %%%%%%%%%%
Pheromone=Q0*ones(Ncities,Ncities);% 信息素初始矩阵;
Heuristic=1./DistMatrix;% 启发信息初始矩阵
Temp=ones(1,Ncities);
Heuristic=1./(1./Heuristic+diag(Temp));
RandL=round(rand(M,1)*Ncities+0.5);%蚂蚁最初位置
Alocation0=zeros(M,Ncities+1);% 存放M+1个蚂蚁游历的路径及长度矩阵初始化
Alocation0(:,1)=RandL;
Allow0=repmat(1:Ncities,M,1);% 允许访问的城市矩阵初始化
for Ak=1:M
Allow0(Ak,RandL(Ak))=0;
end
%%%%%%%%%% 运行参数初始化 %%%%%%%%%%
Nc=1;% 第一代
Lbestdis=inf;
Cbestdis=inf;
Fnewbest=0;
Alocation=Alocation0;% 存放个蚂蚁游历的路径及长度矩阵初始化
Allow=Allow0; % 允许矩阵赋初值
t1=clock;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 蚁群算法初始化程序结束 %%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%% 蚁群算法主循环开始 %%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
while(Nc<=MaxNc)
% M个蚂蚁选择Ncities个城市
for Cityi=2:Ncities+1
if Cityi<Ncities+1
for Ak=1:M
i=Alocation(Ak,Cityi-1);% 当前城市
j=Select_for_aca(R0,Ak,i,Allow,A,B,Pheromone,Heuristic);% 依据Pij选择下一个城市j
Alocation(Ak,Cityi)=j;
Allow(Ak,j)=0;% 更新允许矩阵
Pheromone(i,j)=(1-P1)*Pheromone(i,j)+P1*Q0; % 信息素在线单步更新
Pheromone(j,i)= Pheromone(i,j);
end
else % 返回出发城市
for Ak=1:M
i=Alocation(Ak,Cityi-1);% 当前城市
j=Alocation(Ak,1);
Pheromone(i,j)=(1-P1)*Pheromone(i,j)+P1*Q0; % 信息素在线单步更新
Pheromone(j,i)=Pheromone(i,j);
end
end
end
function D = dists(X1,X2,p,e)
%DISTS Calculates distances between vectors of points.
% D = dists(X1,X2,p,e)
% X1 = n x d matrix of n d-dimensional points
% X2 = m x d matrix of m d-dimensional points
% D = n x m matrix of distances
% = (n-1) x 1 vector of distances between X1 points, if X2 = []
% p = 2, Euclidean (default): D(i,j) = sqrt(sum((X1(i,:) - X2(j,:))^2))
% = 1, rectilinear: D(i,j) = sum(abs(X1(i,:) - X2(j,:))
% = Inf, Chebychev dist: D(i,j) = max(abs(X1(i,:) - X2(j,:))
% = (1 Inf), lp norm: D(i,j) = sum(abs(X1(i,:) - X2(j,:))^p)^(1/p)
% = 'rad', great circle distance in radians of a sphere
% (where X1 and X2 are decimal degree latitudes and longitudes)
% = 'mi' or 'sm', great circle distance in statute miles on the earth
% = 'km', great circle distance in kilometers on the earth
% e = epsilon for hyperboloid approximation gradient estimation
% = 0 (default); no error checking if any non-empty 'e' input
% ~= 0 => general lp used for rect., Cheb., and p outside [1,2]
%
% Great circle distances are calculated using the Haversine Formula (from R.W.
% Sinnott, "Virtues of the Haversine", Sky and Telescope, vol. 68, no. 2, 1984
% p. 159)
% Copyright (c) 1998 by Michael G. Kay
% Matlog Version 1.0 Apr-3-98
% Input Error Checking *******************************************************
if nargin == 4 & ~isempty(e) % No error checking is 'e' input
[n,d] = size(X1);
m = size(X2,1);
else % Do error checking
error(nargchk(1,4,nargin));
e = 0; % 'e' default
[n,d] = size(X1);
if n == 0 | ~isreal(X1)
error('X1 must be non-empty real matrix');
end
if nargin < 2 | isempty(X2) % Calc intra-seq dist b/w X1 points
m = 0; % X2 default
if n < 2
error('X1 must have more than 1 point');
end
else % Calc dist b/w X1 and X2 points
[m,dX2] = size(X2);
if m == 0 | ~isreal(X2)
error('X2 must be non-empty real matrix');
end
if d ~= dX2
error('Rows of X1 and X2 must have same dimensions');
end
end
if nargin < 3 | isempty(p)
p = 2; % 'p' default
elseif ~ischar(p) % lp distances
if length(p(:)) ~= 1 | ~isreal(p)
error('''p'' must be a real scalar number');
end
elseif ischar(p) % Great circle distances
p = lower(p);
if d ~= 2
error('Points must be 2-dimensional for great-circle distances');
end
if ~any(strcmp(p,{
'rad','mi','sm','km'}))
error('''p'' must be either ''rad,'' ''mi,'' ''sm,'' or ''km''');
end
else
error('''p'' not valid value');
end
end
% End (Input Error Checking) ***********************************************
% Interchange if X2 is the only 1 point
intrchg = 0;
if n > 1 & m == 1
tmp = X2; X2 = X1; X1 = tmp;
m = n;n = 1;
intrchg = 1;
end
% 1-dimensional points
if d == 1
if e == 0
if m ~= 0
D = abs(X1(:,ones(1,m)) - X2(:,ones(1,n))');
else
D = abs(X1(1:n-1) - X1(2:n))'; % X1 intra-seq. dist.
end
else
if m ~= 0
D = sqrt((X1(:,ones(1,m)) - X2(:,ones(1,n))').^2 + e);
else
D = sqrt((X1(1:n-1) - X1(2:n)).^2 + e)';
end
end
% X1 only 1 point or intra-seq dist
elseif n == 1 | m == 0
if n == 1 % Expand X1 to match X2
X1 = X1(ones(1,m),:);
n = m;
else % X1 intra-seq. dist.
X2 = X1(2:n,:); % X2 = ending points
n = n - 1;
X1 = X1(1:n,:); % X1 = beginning points
end
if p == 2 % Euclidean distance
D = sqrt(sum(((X1 - X2).^2 + e)'));
elseif ischar(p) % Great-circle distance
X1 = pi*X1/180;X2 = pi*X2/180;
D = 2*asin(min(1,sqrt(sin((X1(:,1) - X2(:,1))/2).^2 + ...
cos(X1(:,1)).*cos(X2(:,1)).* ...
sin((X1(:,2) - X2(:,2))/2).^2)))';
elseif p == 1 & e == 0 % Rectilinear distance
D = sum(abs(X1 - X2)');
elseif (p >= 1 & p <= 2) | (e ~= 0 & p > 0) % General lp distance
D = sum((((X1 - X2).^2 + e).^(p/2))').^(1/p);
elseif p == Inf & e == 0 % Chebychev distance
D = max(abs(X1 - X2)');
else % Otherwise
D = zeros(1,n);
for j = 1:n
D(j) = norm(X1(j,:) - X2(j,:),p);
end
end
三、运行结果



四、备注
完整代码或者代写添加QQ912100926
往期回顾>>>>>>
【路径规划】粒子群优化算法之三维无人机路径规划【Matlab 012期】
【路径规划】遗传算法之多物流中心的开放式车辆路径规划【Matlab 013期】
【路径规划】粒子群算法之机器人栅格路径规划【Matlab 014期】
【路径规划】蚁群算法之求解最短路径【Matlab 015期】
【路径规划】免疫算法之物流中心选址【Matlab 016期】
【路径规划】人工蜂群之无人机三维路径规划【Matlab 017期】
【路径规划】遗传算法之基于栅格地图机器人路径规划【Matlab 018期】
【路径规划】蚁群算法之多无人机攻击调度【Matlab 019期】
【路径规划】遗传算法之基于栅格地图的机器人最优路径规划【Matlab 020期】
【路径规划】遗传算法之考虑分配次序的多无人机协同目标分配建模【Matlab 021期】
【路径规划】蚁群算法之多中心vrp问题【Matlab 022期】
【路径规划】蚁群算法之求解带时间窗的多中心VRP【Matlab 023期】
【路径规划】遗传算法之多中心VRP求解【Matlab 024期】
【路径规划】模拟退火之求解VRP问题【Matlab 025期】
【路径规划】A星之栅格路径规划【Matlab 026期】
【路径规划】基于一种带交叉因子的双向寻优粒子群栅格地图路径规划【Matlab 027期】
【路径规划】【TSP】蚁群算法之求解TSP问题含GUI【Matlab 028期】
【路径规划】蚁群算法之栅格地图路径规划【Matlab 029期】
【路径规划】遗传算法之旅行商 TSP 【Matlab 030期】
【路径规划】模拟退火算法之旅行商 TSP 问题【Matlab 031期】
【路径规划】蚁群算法之智能车路径规划【Matlab 032期】
【路径规划】华为杯:基于matlab 无人机优化运用于抢险救灾【Matlab 033期】
【路径规划】matlab之最小费用最大流算问题【Matlab 034期】
【路径规划】A算法之解决三维路径规划问题【Matlab 035期】
【路径规划】人工蜂群算法之路径规划【Matlab036期】
【路径规划】人工蜂群算法之路径规划【Matlab 037期】
【路径规划】蚁群算法之求解多旅行商MTSP问题【Matlab 038期】
【路径规划】蚁群算法之无人机路径规划【Matlab 039期】
【路径规划】遗传算法之求解多VRP问题【Matlab 040期】
【VRP】遗传算法之带时间窗的车辆路径问题【Matlab 041期】
【路径规划】蚁群算法之三维路径规划【Matlab 042期】
【路径规划】粒子群优化蚁群之求解最短路径【Matlab 043期】
【TSP问题】差分进化之求解TSP问题【Matlab 044期】
【路径规划】RRT之三维路径规划【Matlab 144期】
【路径规划】人工势场算法之无人机编队路径规划【 Matlab 145期】
【VRP问题】节约算法之求解TWVRP问题【Matlab 146期】
【VRP问题】节约算法之求解CVRP问题【Matalb 147期】
【VRP问题】禁忌搜索算法之求解VRP问题【Matalb 148期】
【VRP问题】模拟退火算法之求解CVRP问题【Matlab 149期】
【VRP问题】模拟退火求解带时间窗之TWVRP问题【Matlab 150期】
【VRP问题】人工鱼群算法之求解带时间窗VRP问题【Matlab 151期】
【VRP问题】遗传算法之求解带容量VRP问题【Matlab 152期】
【路径规划】狼群算法算法之三维路径规划【Matlab 153期】
【路径规划】人工势场算法之无人机三维路径规划【Matlab 154期】
【路径规划】改进差分算法之三维多无人机协同航迹规划【Matlab 155期】
【路径规划】人工蜂群算法之多无人机三维路径规划【Matlab 156期】
【路径规划】麻雀搜索算法之无人机三维路径规划【Matlab 157期】
【路径规划】蚁群算法之三维路径规划【Matlab 158期】
【路径规划】免疫算法之最短路径规划【Matlab 159期】
【旅行商问题】免疫算法之求解旅行商问题【Matlab 160期】
【路径规划】遗传算法的公交排班系统分析【Matlab 161期】
【TSP】粒子群算法Hopfield之TSP求解【Matlab 162期】
【路径规划】A和改进A*的路径规划【Matlab 163期】
【TSP】改进的禁忌搜索算法之求解旅行商问题【Matlab 170期】
【TSP】改进的蚁群算法之求解旅行商问题【Matlab 171期】
【路径规划】模拟退火算法之求解火灾巡逻最短路径【Matlab 193期】
【三维路径规划】蚁群算法寻优潜水器的三维路径【Matlab 194期】
【三维路径规划】matlab 蚁群算法UAV巡检路径【Matlab 195期】
【三维路径规划】无人机的三维动态仿真【Matlab 196期】
【三维路径规划】无人机三维空间的航迹规划【Matlab 228期】
【路径规划】分布式目标检测和跟踪的多无人机【Matlab 229期】
【路径规划】粒子群算法求解无人机最短路径【Matlab 277期】
【无人机】多无人协同任务分配程序平台【Matlab278期】
【路径规划】多无人机协同任务规划【Matlab 279期】
【路径规划】任意架次植保无人机作业路径规划【Matlab 280期】
【路径规划】粒子群遗传求解多无人机三维路径规划【Matlab 281期】
【VRP问题】粒子群求解VRPTW模型【Matlab 282期】
【路径规划】改进蚁群算法的路径规划【Matlab 283期】
【VRP】改进的模拟退火和遗传算法求解VRP问题【Matlab 284期】
【VRP问题】灰狼算法求解VRPTW问题【Matlab 285期】
【VRP问题】遗传算法和模拟退火求解带时间窗的自行车调度问题【Matlab 286期】
【路径规划】改进的人工势场法机器人动静态避障【Matlab 287期】
【TSP】混合粒子群求解TSP问题【Matlab 288期】
【TSP】蚁群算法求解旅行商问题【Matlab 289期】
【TSP】hopfield神经网络求解TSP问题【Matlab 290期】