参考链接:
单独安装标定工具包即可。
nlopt安装
calibration_camera_lidar安装
缺包:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"jsk_recognition_msgs" with any of the following names:
本人环境ubuntu18.04,安装jsk_recognition_msgs
sudo apt-get install ros-melodic-jsk-recognition-msgs
new bgug:
CMake Error at /usr/share/cmake-3.25/Modules/FindPackageHandleStandardArgs.cmake:230 (message):
Could NOT find GLUT (missing: GLUT_glut_LIBRARY GLUT_INCLUDE_DIR)
https://blog.csdn.net/weixin_46584887/article/details/125747117
sudo apt-get install freeglut3-dev
new new bug:

https://blog.csdn.net/qq_49959714/article/details/126266954
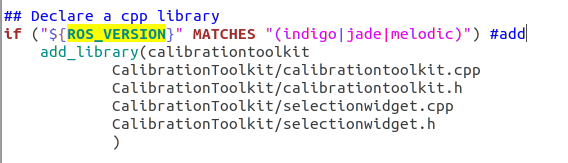
修改src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar路径下的CMakeLists.txt

bug:没有节点,修改CMakeLists.txt文件
https://blog.csdn.net/zbr794866300/article/details/122216233

bug:缺少头文件
/home/pilot/robosense/calibration/src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar/nodes/calibration_test/scan_window.cpp:42:45: error: ‘CV_RGB’ was not declared in this scope
cvLine(image, line_start, line_end, CV_RGB (120, 120, 120), 1, 8, 0);
^~~~~~
报错:conversion from ‘cv::Mat’ to non-scalar type ‘IplImage {aka _IplImage}
https://blog.csdn.net/weixin_43562170/article/details/117963652
对照教程、提示修改对应文件:
// IplImage temp = cv_image->image;
IplImage temp = cvIplImage(cv_image->image);
报错:
error: no match for ‘operator=’ (operand types are ‘CvMat’ and ‘cv::Mat’)
*m_intrinsic = m_intrinsic_opencv2to1;
^~~~~~~~~~~~~~~~~~~~~~
error: no match for ‘operator=’ (operand types are ‘CvMat’ and ‘cv::Mat’)
*m_dist = m_dist_opencv2to1;
^~~~~~~~~~~~~~~~~
就剩下这两个错误了!!!!注释掉了这两句,在代码中只看到了赋值,没有看到其他使用

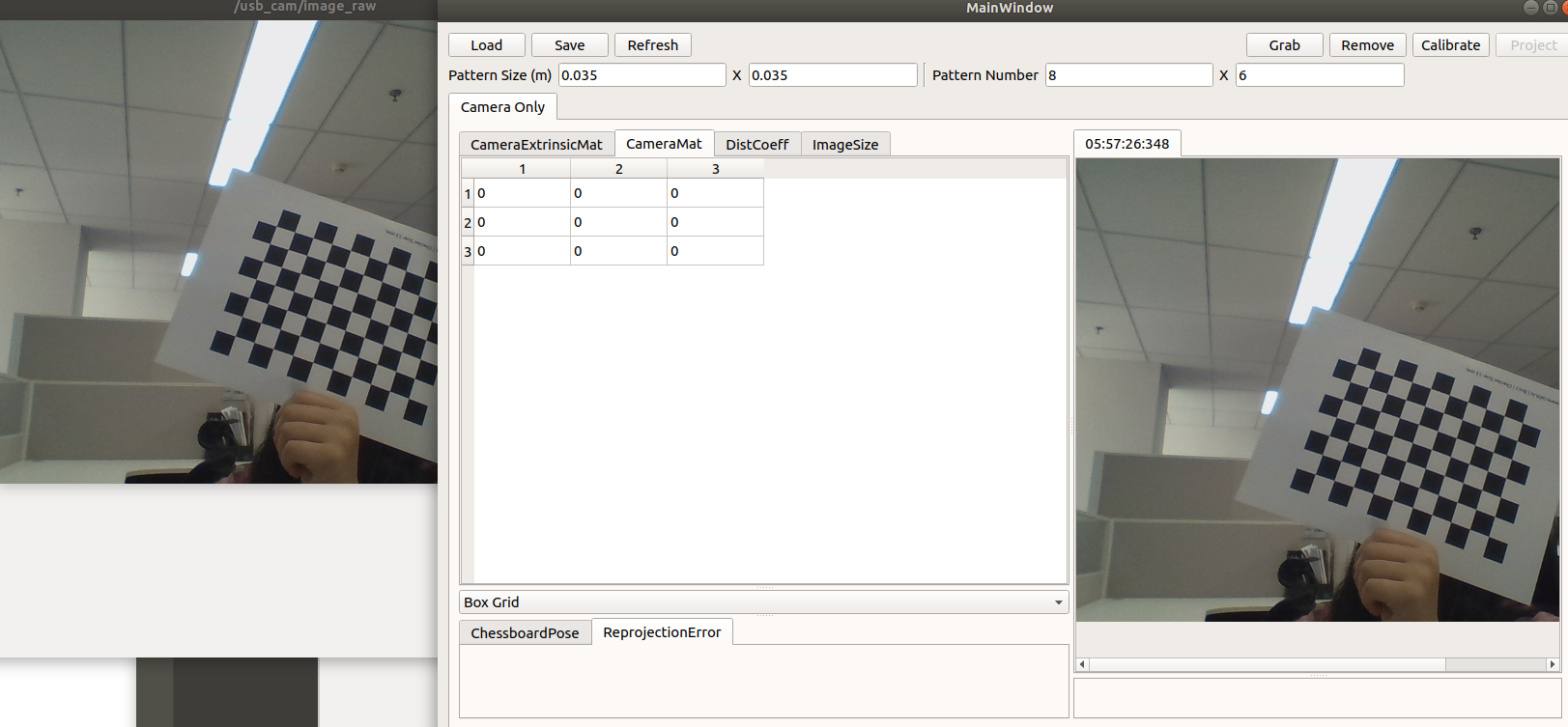
工具包现在可以启动开,但是不确定能否正常使用,毕竟注释了两条代码。
下一篇记录使用过程~