一级目录
为了实现对永磁同步电机无位置矢量控制系统所需的转子位置和速度的准确估计,提出一种基于
跟踪微分器的新型非奇异快速终端滑模观测器(NFTSMO)。首先,构建积分型非奇异快速终端滑模面,
使电流观测误差在有限时间内快速收敛到零,避免了终端滑模存在的奇异问题及传统非奇异终端滑模
面中微分状态带来的噪声;然后,结合具有终端吸引子的低抖振切换控制设计滑模控制律,经过跟踪微
分器获得平滑的反电动势估算值,减小了传统滑模观测器中低通滤波器引起的相位滞后;最后,基于锁
相环原理,从观测的反电动势中调制出转子位置和速度信息。仿真结果表明,采用文中提出的新型滑模
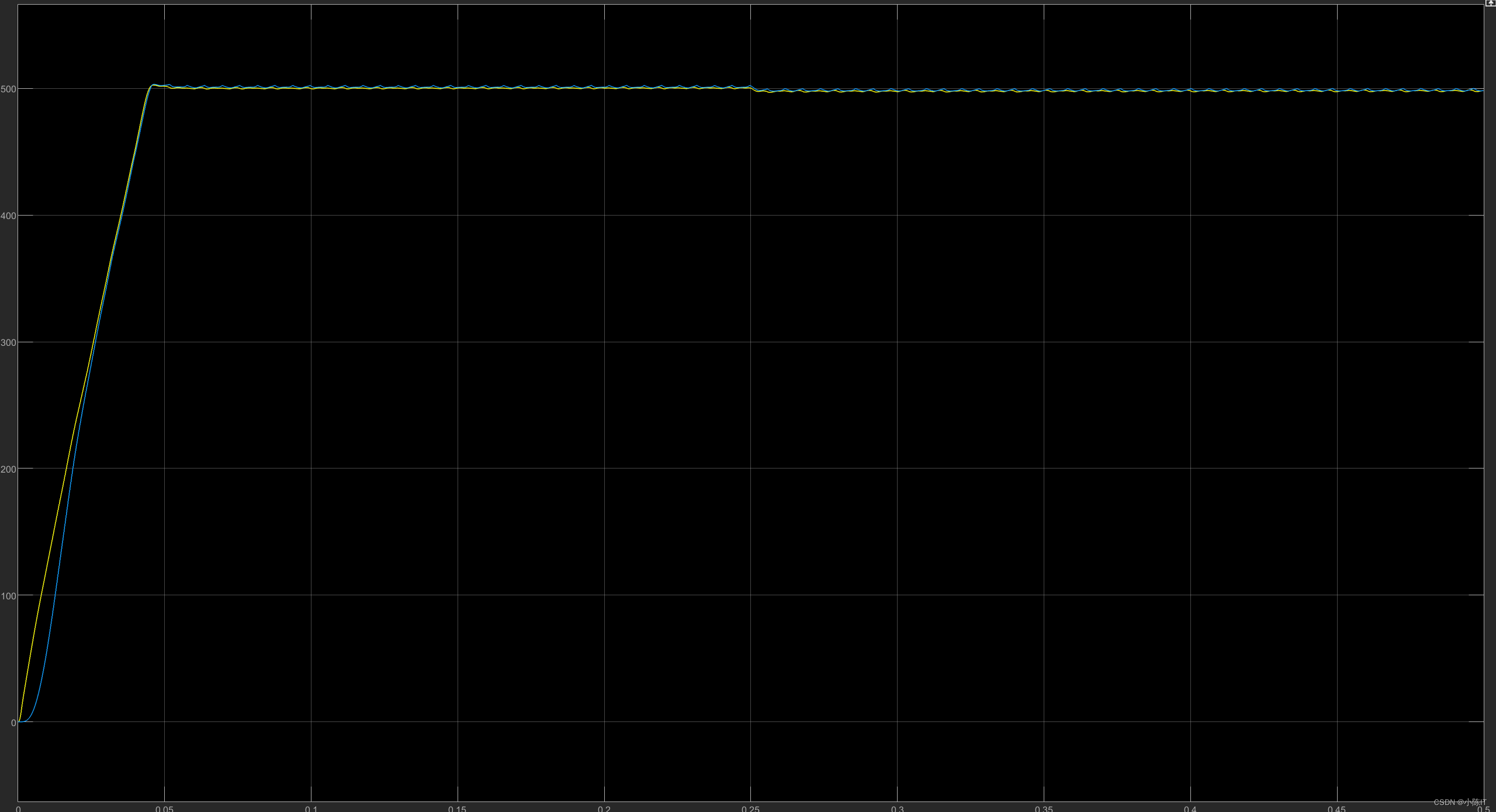
观测器可以实现对永磁同步电机转速的准确估计,转速最大估计误差在士l r/min之间,且估计的转子
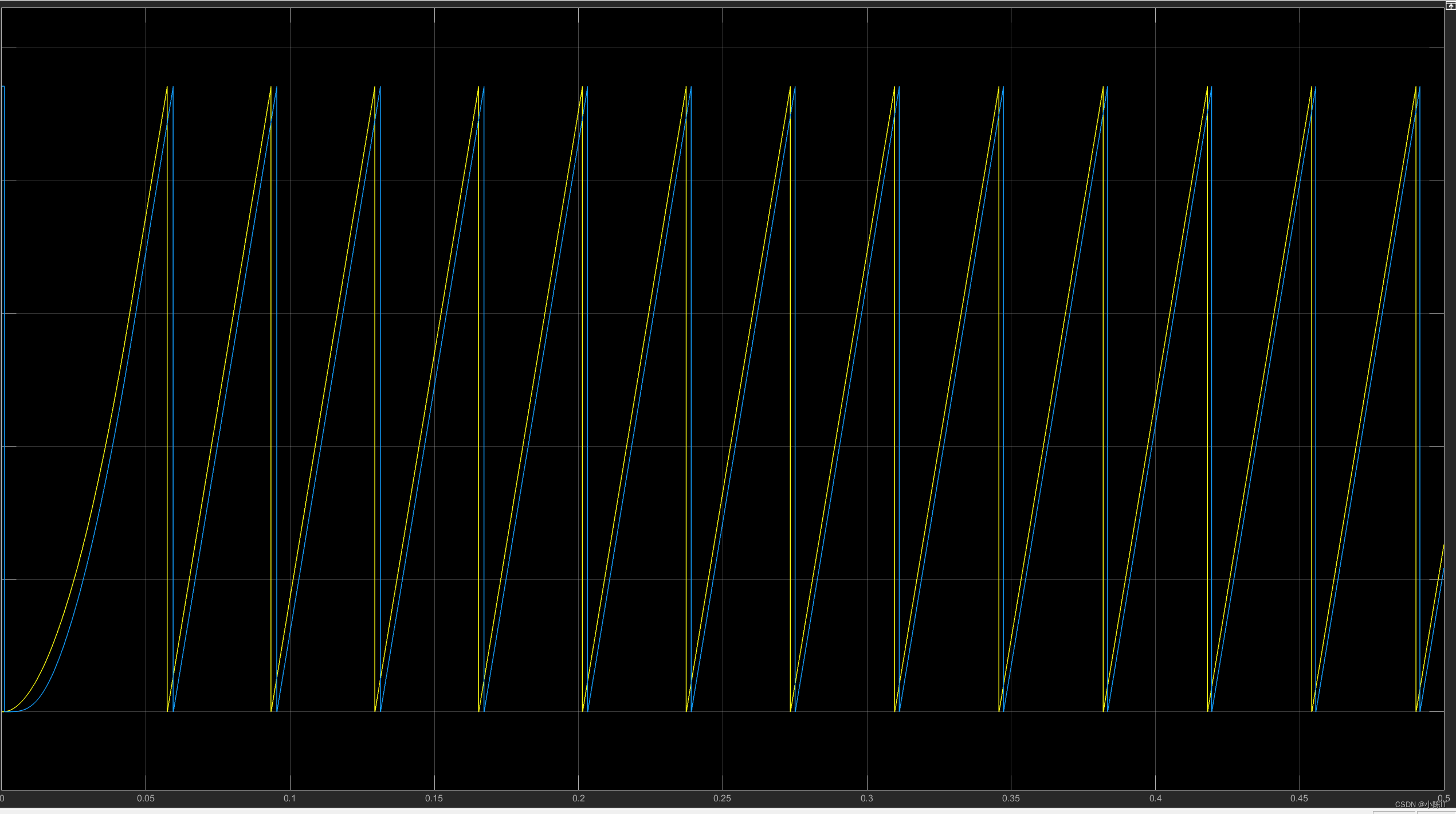
位置无相位滞后,误差小,系统动,静态响应好。与传统滑模观测器相比,该新型滑模观测器具有收敛
速度更快,跟踪精度更高、反电动势抖振更小的特点,当系统存在负载扰动及参数摄动时,仍然能够准
确地估算出电机转子的位置和速度,具有较强的鲁棒性。
传统滑模观测器
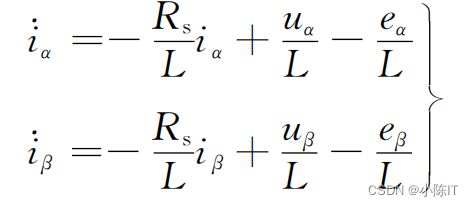
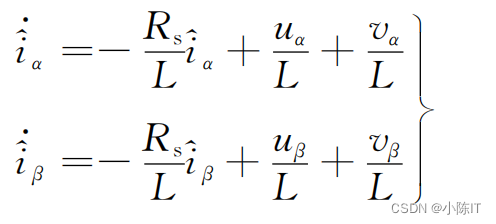
根据上式构建PMSM 滑模观测器
由两式相减得到定子电流误差系统

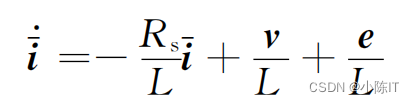
将上式变换得:
滑模面是:

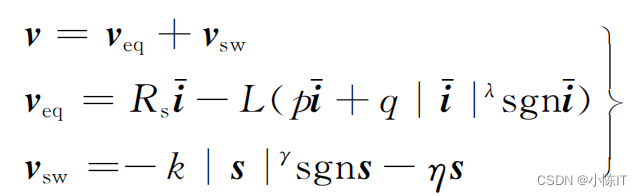
控制率是:

新型非奇异终端滑模观测器:
选择新的滑模面:


新的控制率如下:
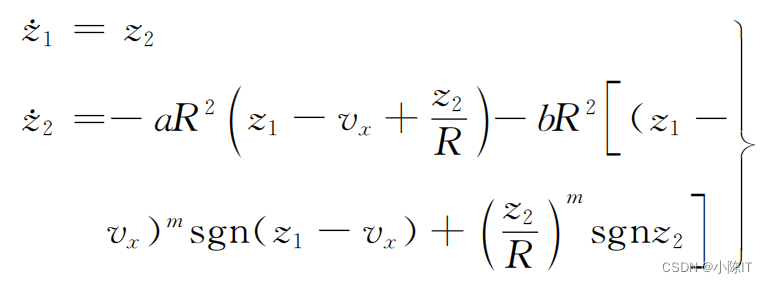
为了进一步减小高频噪声,通过跟踪微分器实现对反电动势的精确跟踪,同时实现滤波功能,设计了含终端吸引子的低抖振快速跟踪微分器
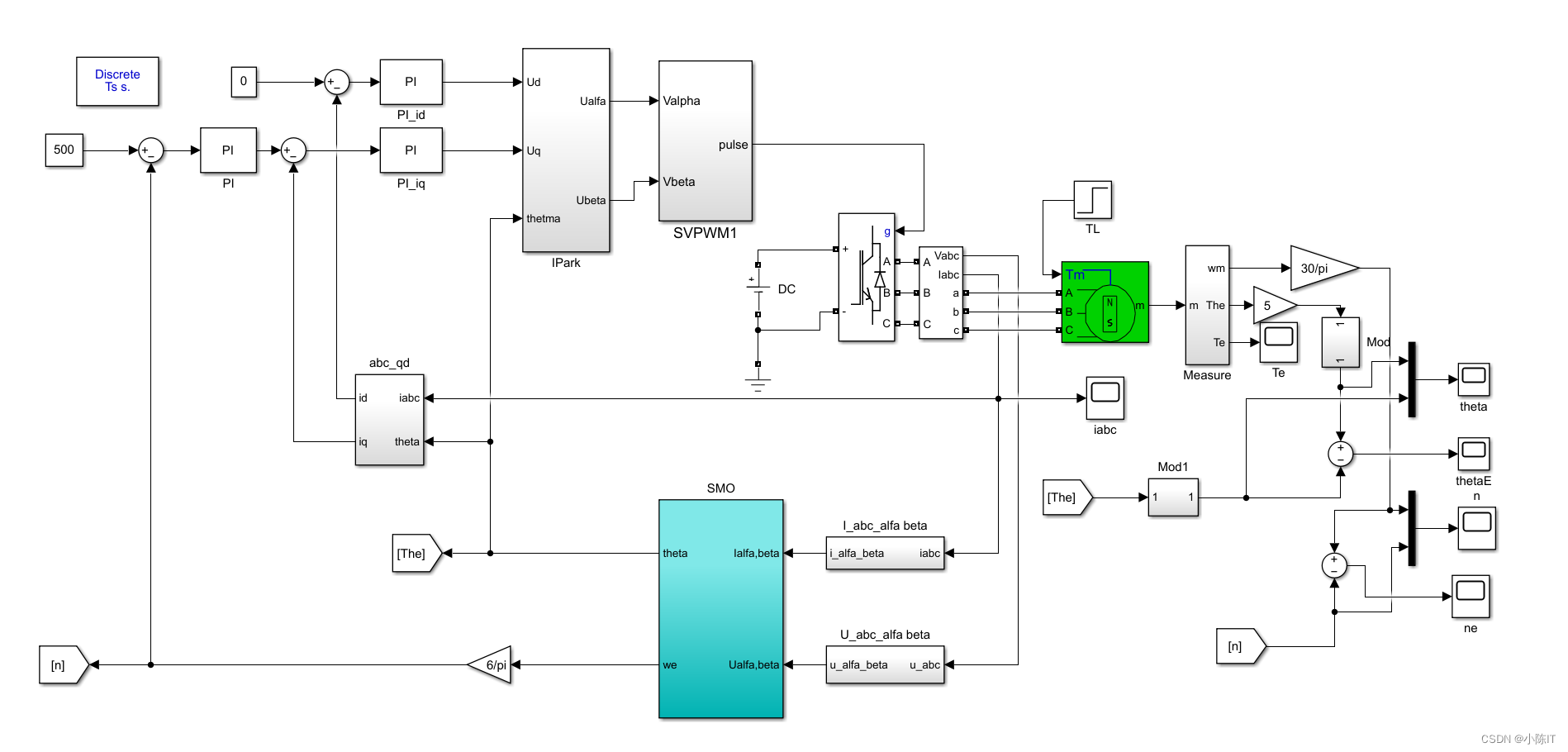
仿真
仿真总体框图:
转速环:
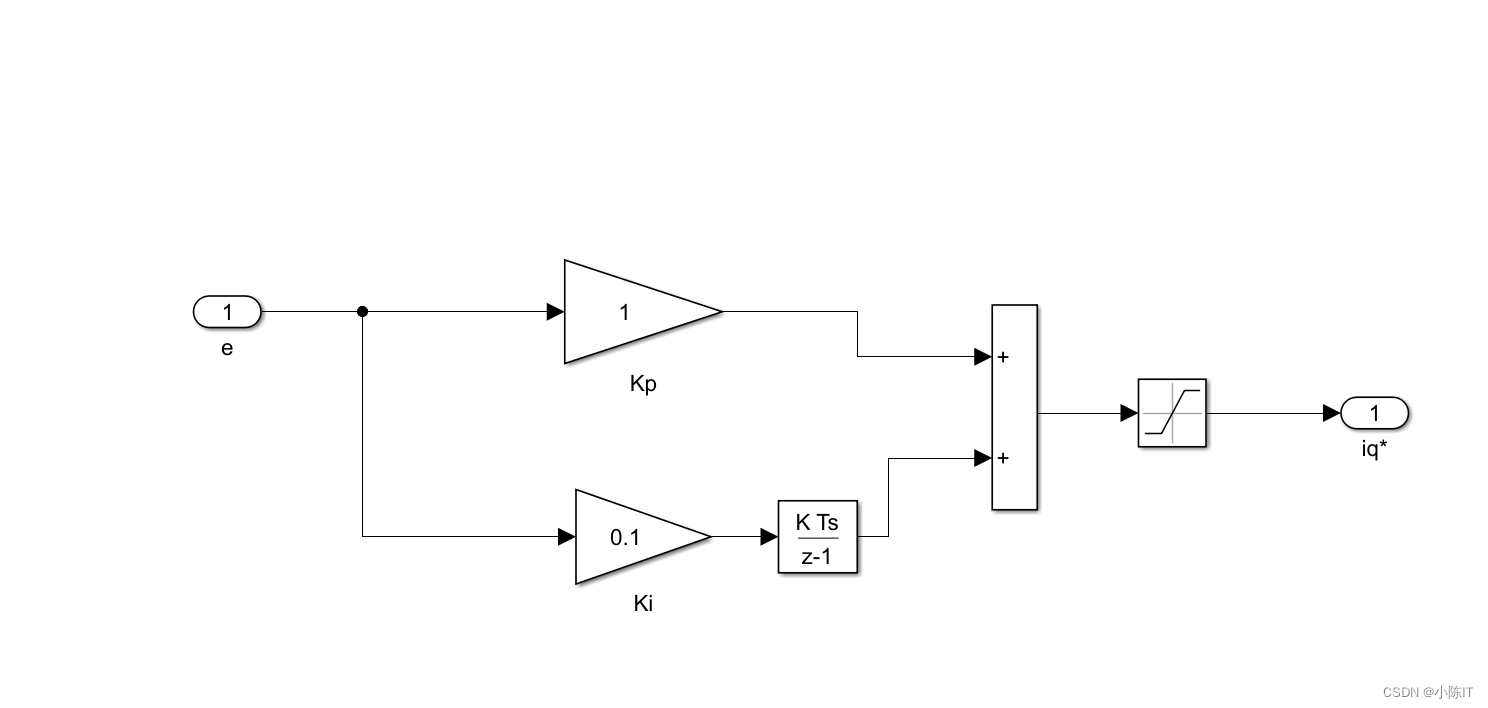
电流环:

电机参数:
R = 0.258;
L = 0.827e-3;
Ts=1e-6;
flux=0.057;
B=0;
J=0.0065;
Pn=5;
k=50;
p=10;
q=10;
a=100;
b=100;
m=1.3;
r=2500;

新型SMO

SMO内部:
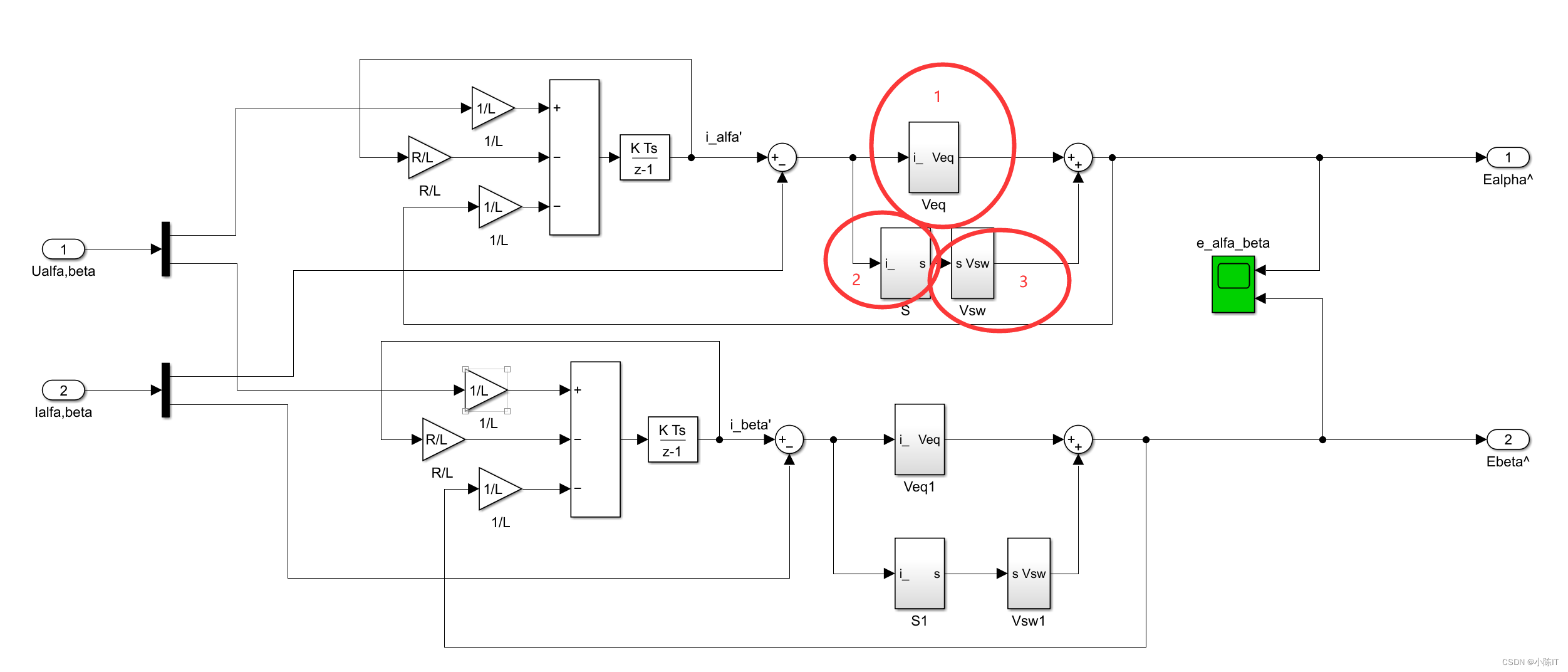
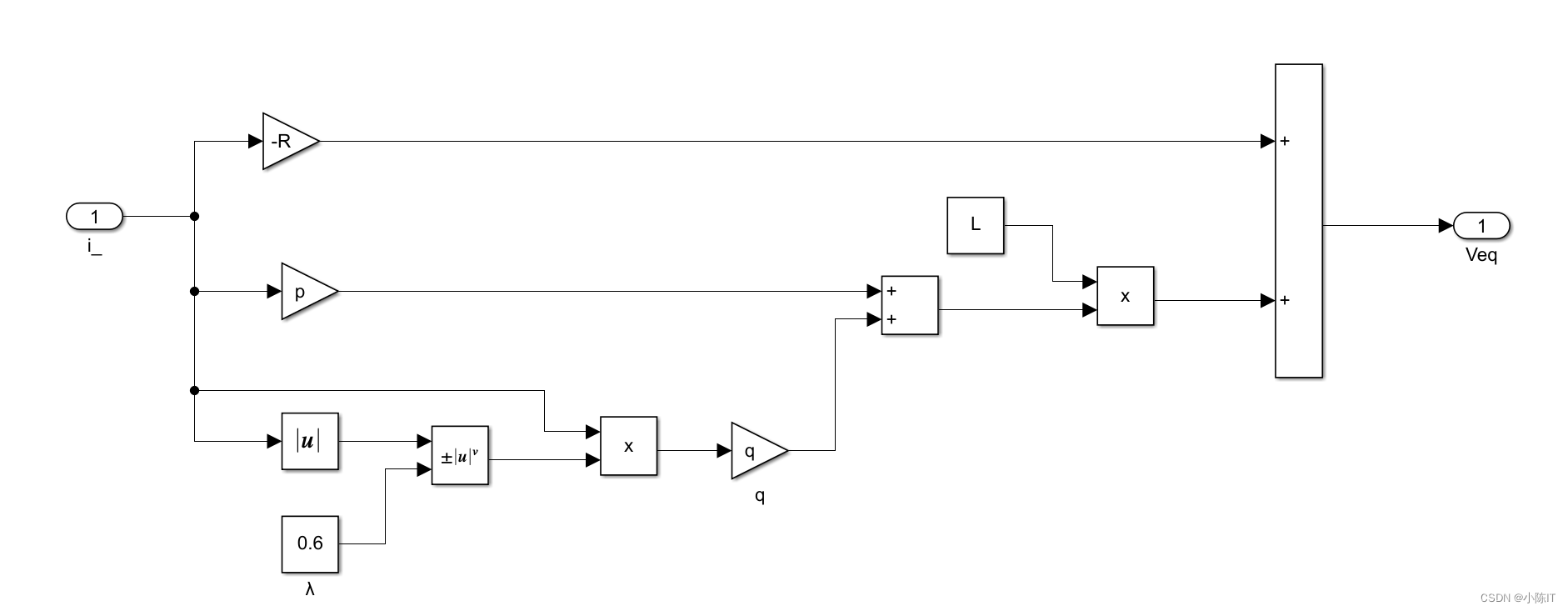
Veq:
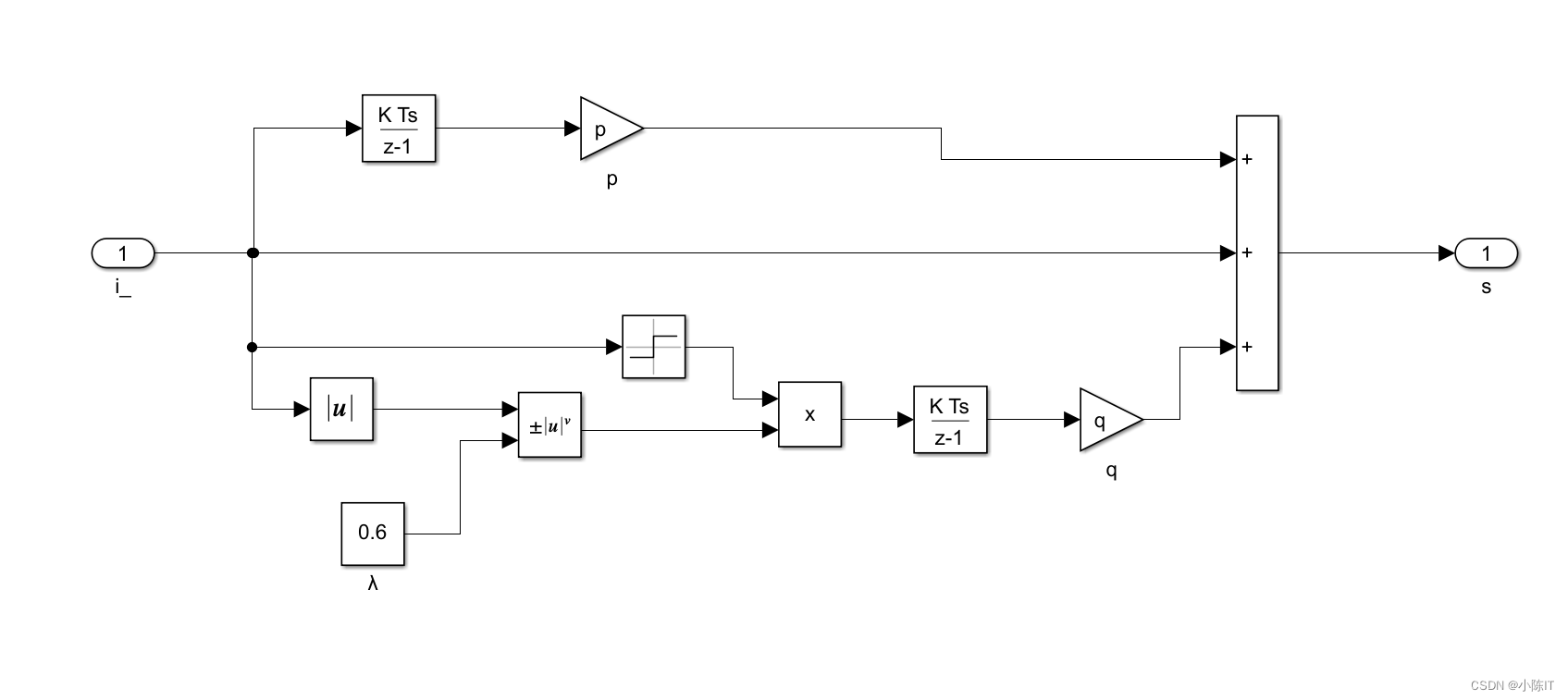
S:
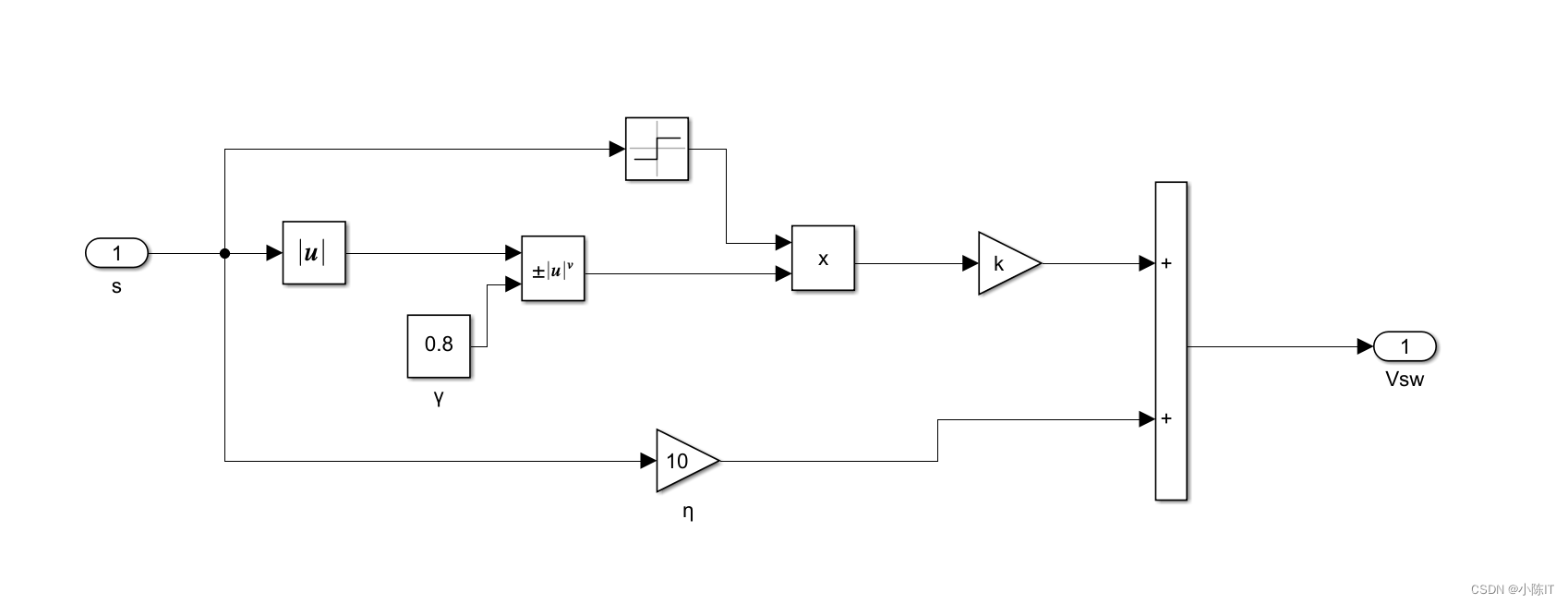
Vsw:
Arctan_function

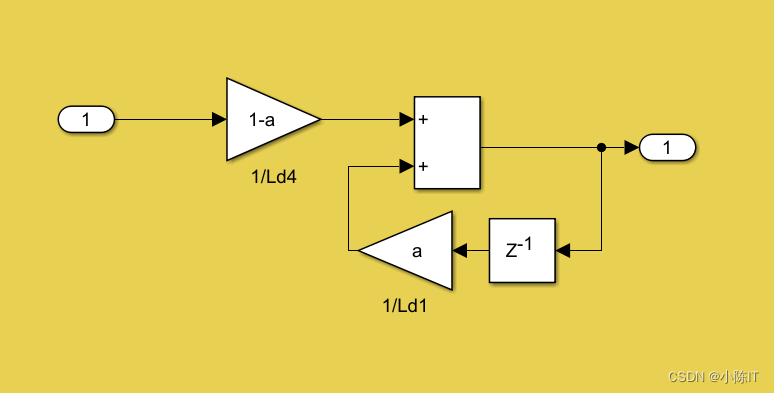
SPLL:
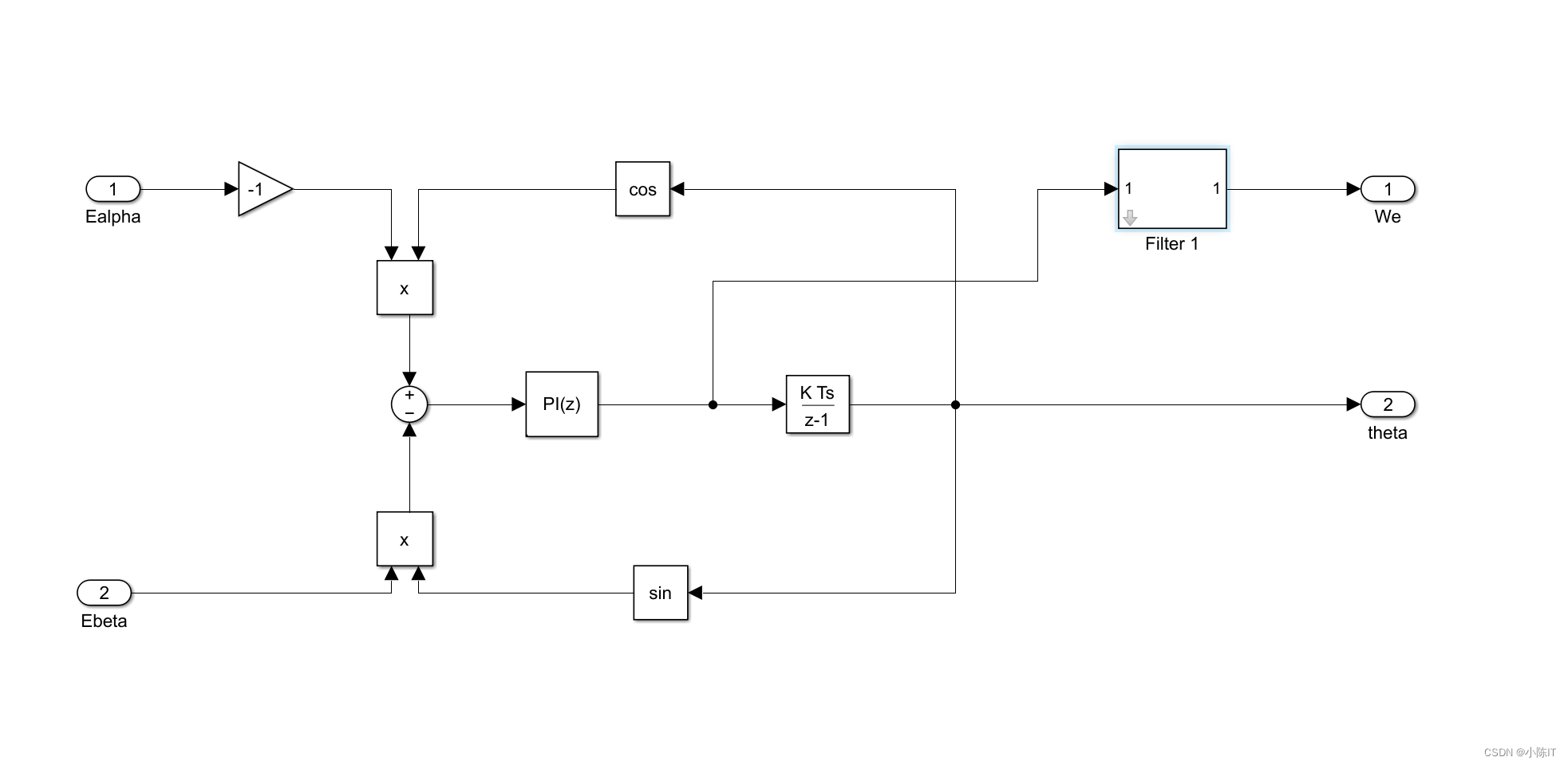
SPLL里面的滤波器(a是0.97):
波形
速度波形:
角度波形:
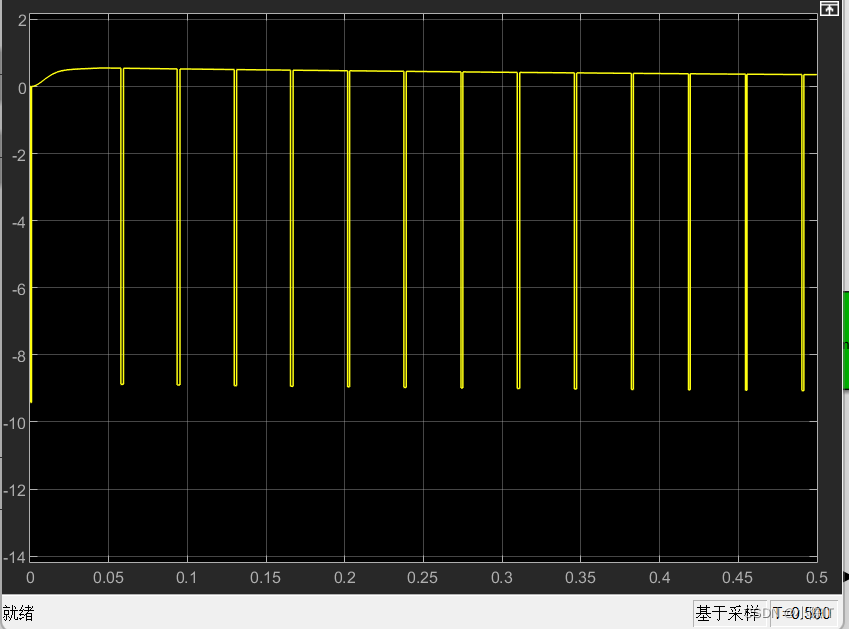
速度误差:

角度误差:
总结
理论和仿真凑活看!!!!!!!关注我谢谢