文章目录
前言
环境:
ubuntu 20.04
VMware16.0
vscode
一、ros安装
1、添加ROS软件源:
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
2、添加密钥:
sudo apt-key adv --keyserver ‘hkp://keyserver.ubuntu.com:80’ --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
3、安装ROS:
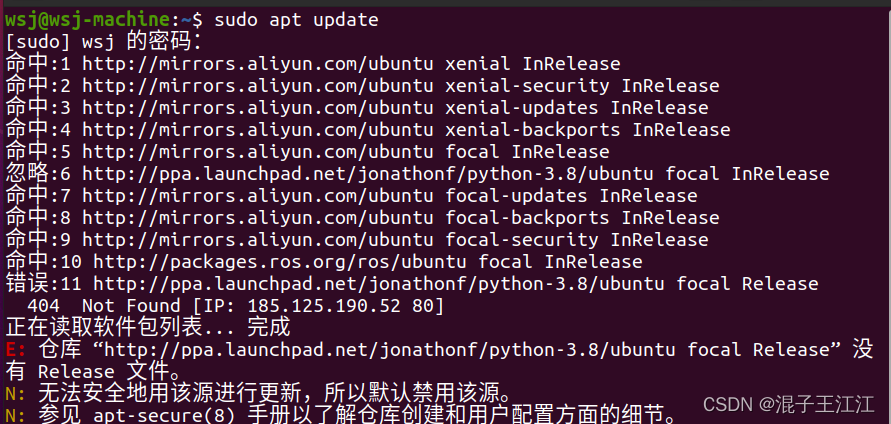
sudo apt update
注:这句命令是更新软件源,会从上面的软件源搜索所有与ros相关的安装包的路径,更新到系统中,可能会有某些出现错误,可以更换为热点再试试。
可是我遇到的这个问题怎么也找不到,后面发现这不是安装ros必须的,好像是我前面安装了python2.7然后改为3.8出现的问题吧,进行了许多操作也无法解决,然后我就先忽略了。
sudo apt install ros-noetic-desktop-full
注意:不同的ubuntu版本对应不同版本的ros,我是ubuntu20.0.4,所以采用noetic,这里的下载时间可能会有点久,稍等。
4、初始化rosdep:
sudo rosdep init
初始化rosdep,用于帮助我们完成一些功能包的依赖的设置和安装。
错误1:
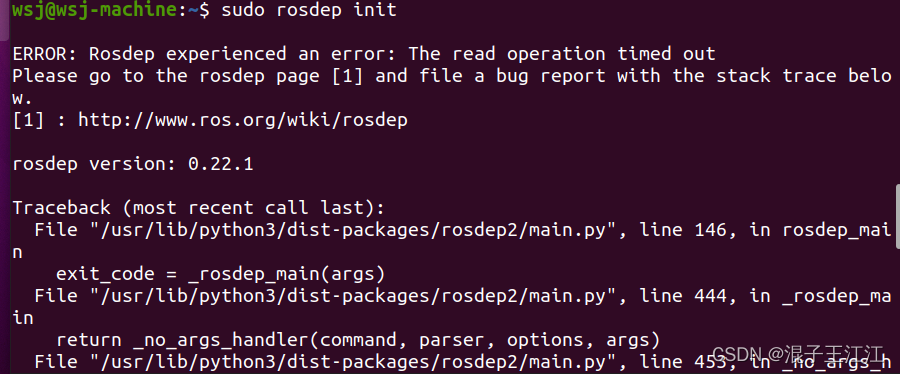
这种情况可能是被墙了,重试几次或者换一下网络。
错误2:

输入下面的命令修改一下host文件:
sudo gedit /etc/hosts

在第一行添加raw.githubusercontent.com的ip地址,再进行初始化:
199.232.28.133 raw.githubusercontent.com
错误3:

输入下面命令:
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list
如果正常的化应该会出现下面的情况,可是我的不正常,又回到第二个错误了:
于是我借助了六部工坊的配置修改工具进行处理:
1、安装Python的软件包管理工具 pip
sudo apt-get install python3-pip
2、使用pip安装配置修改工具
sudo pip3 install 6-rosdep
3、运行配置修改工具
sudo 6-rosdep
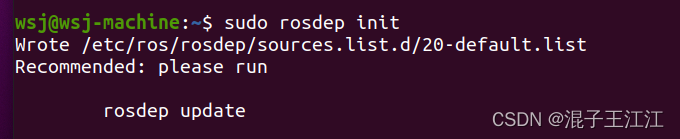
随后便可以正常运行sudo rosdep init了。如果还是解决不了,建议可以采用鱼香大佬的一键安装,简单直接。
鱼香一键安装
- init完了以后输入下面的命令进行更新:
rosdep update
5、设置环境变量:
注意下面这行命令也与ubuntu的版本有关:
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
运行下面的命令让环境变量生效:
source ~/.bashrc
6、安装rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool
错误: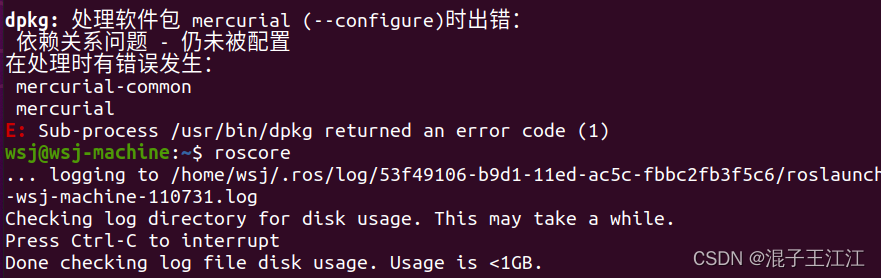
没能成功解决,但运行roscore成功。
至此,ros安装结束。
二、体验小海龟案例
1.键盘控制小海龟:
1、新建一个终端运行ros
roscore
2、新建终端启动小海龟的仿真器
rosrun turtlesim turtlesim_node
3、新建终端打开键盘控制器
rosrun turtlesim turtle_teleop_key
通过键盘上下键对小海龟进行控制,一个小细节就是,鼠标需要在打开键盘的终端点击一下键盘才生效。

2.话题查看器查看两个node之间的消息传递
在上面的三个终端运行的时候,再新建一个终端输入下面的命令查看话题:
rqt_graph
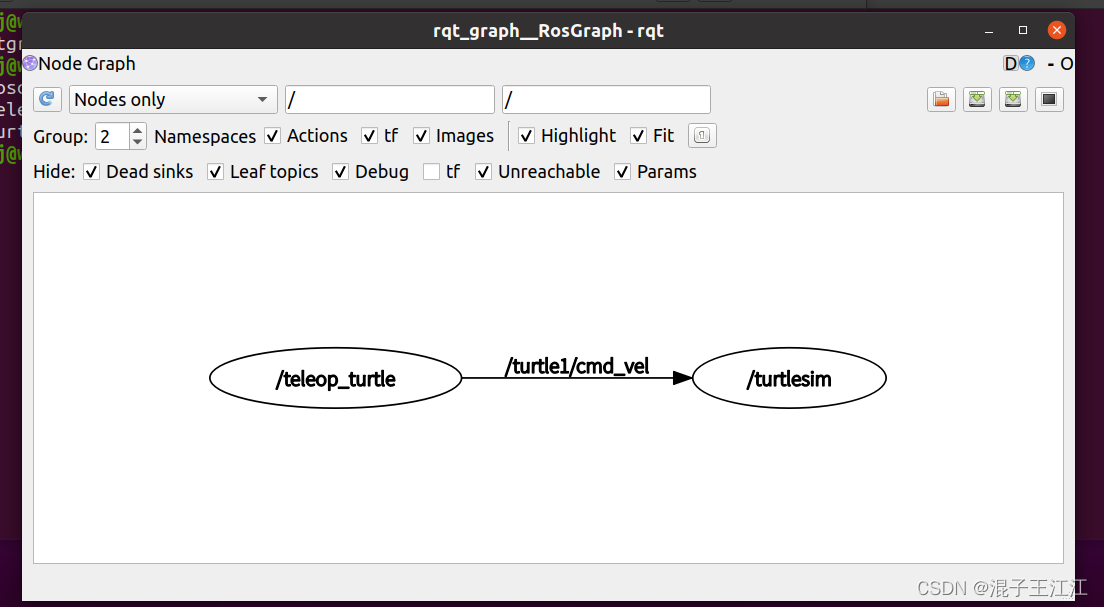
/teleop_turtle发布者通过 /turtle1/cmd_vel 这个话题向订阅者 /turtlesim 进行发布内容。
3、C++写一个程序,控制小海龟走一个圆形
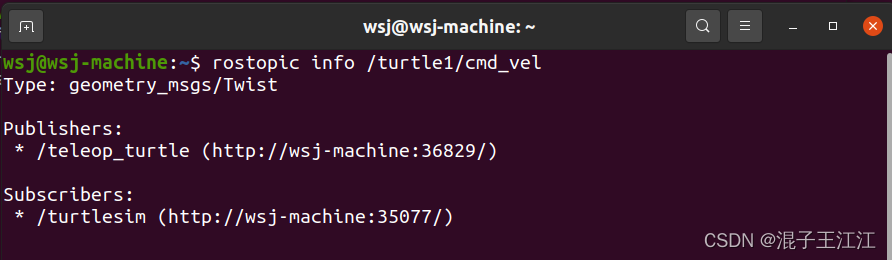
输出话题的内容:
rostopic info /turtle1/cmd_vel
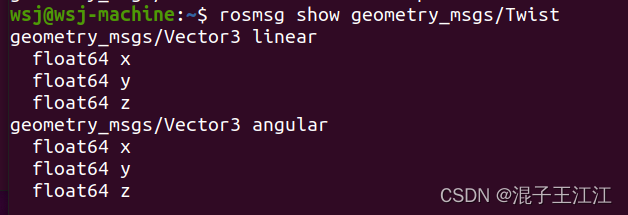
查看自定义类型有什么:
rosmsg show geometry_msgs/Twist
- 实践:
因为ros中已经封装了小海龟的案例,所以我们可以写一个C++程序通过话题通信对小海龟进行控制。
- 创建工作空间并用code打开:
mkdir -p test_ws/src
cd test_ws
catkin_make
code .
- 设置环境变量:
source devel/setup.bash
- 创建功能包:
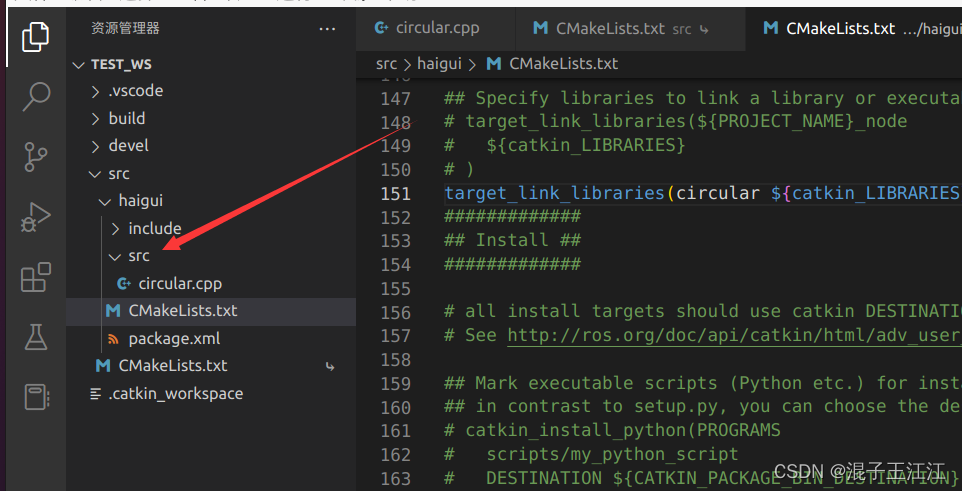
cd到src目录下,新建haigui包
catkin_create_pkg haigui std_msgs roscpp
- 在功能包下的右击创建cpp文件:
- 代码:
/*
编写 ROS 节点,控制小乌龟画圆
准备工作:
1.获取topic(已知: /turtle1/cmd_vel)
2.获取消息类型(已知: geometry_msgs/Twist)
3.运行前,注意先启动 turtlesim_node 节点
实现流程:
1.包含头文件
2.初始化 ROS 节点
3.创建发布者对象
4.循环发布运动控制消息
*/
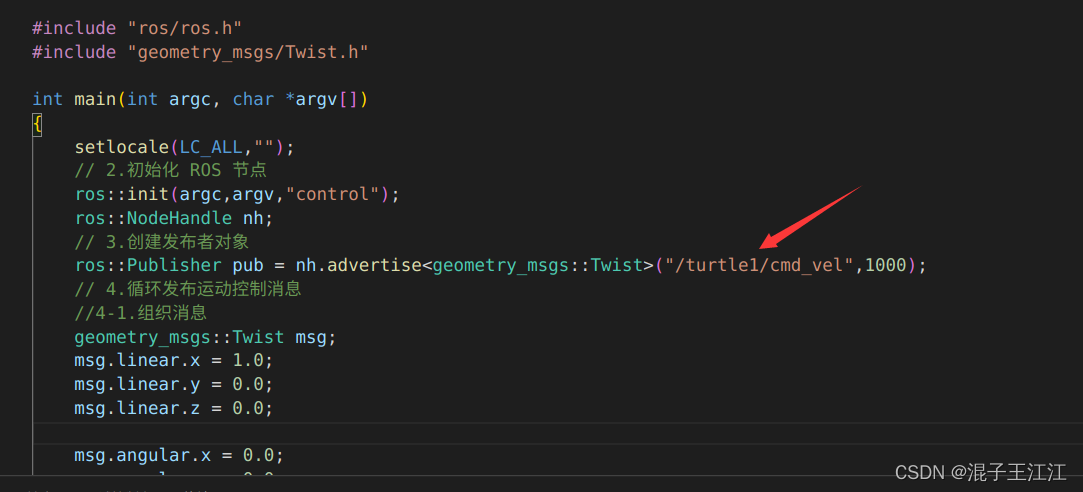
#include "ros/ros.h"
#include "geometry_msgs/Twist.h"
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2.初始化 ROS 节点
ros::init(argc,argv,"control");
ros::NodeHandle nh;
// 3.创建发布者对象
ros::Publisher pub = nh.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel",1000);
// 4.循环发布运动控制消息
//4-1.组织消息
geometry_msgs::Twist msg;
msg.linear.x = 1.0;
msg.linear.y = 0.0;
msg.linear.z = 0.0;
msg.angular.x = 0.0;
msg.angular.y = 0.0;
msg.angular.z = 2.0;
//4-2.设置发送频率
ros::Rate r(10);
//4-3.循环发送
while (ros::ok())
{
pub.publish(msg);
ros::spinOnce();
}
return 0;
}
- 错误1:

这两句在最初引入的时候会报错,好像是找不到文件,我们需要在报红处点击详情进行include操作。
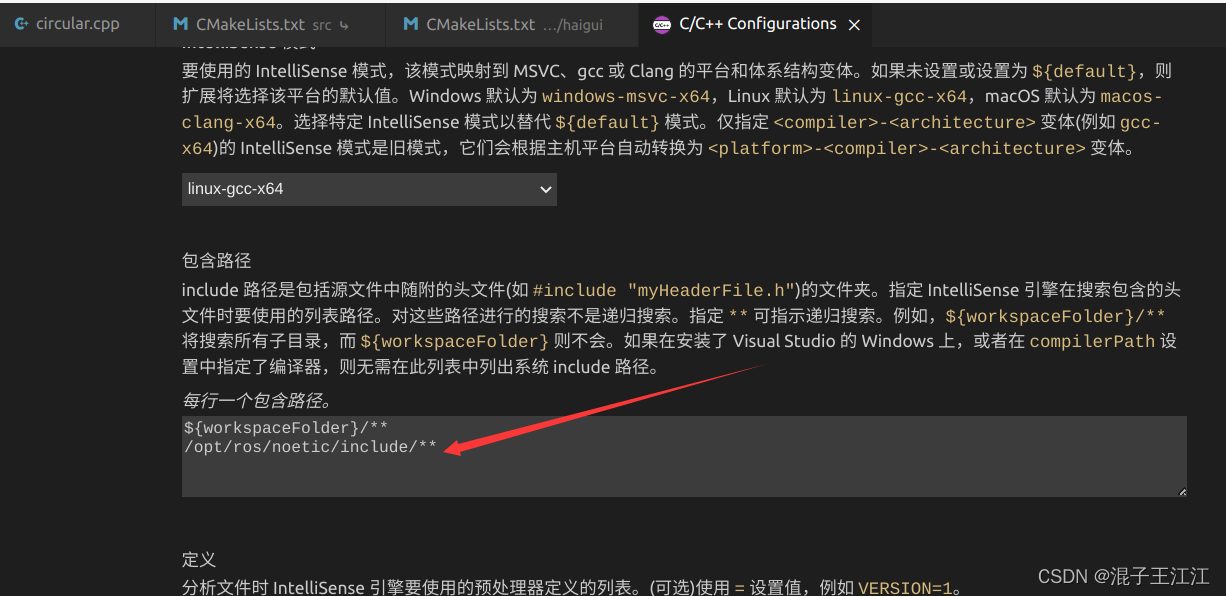
不同版本的位置不同,一般都在opt下,在输入节后,在方框外点击使其生效。
- 错误2:
出现这种问题的情况比较多,我是因为修改了没保存,所以大家在下载完vscode之后设置为自动保存最好。
- 修改haigui文件夹下的CMakeLists.txt文件内容:
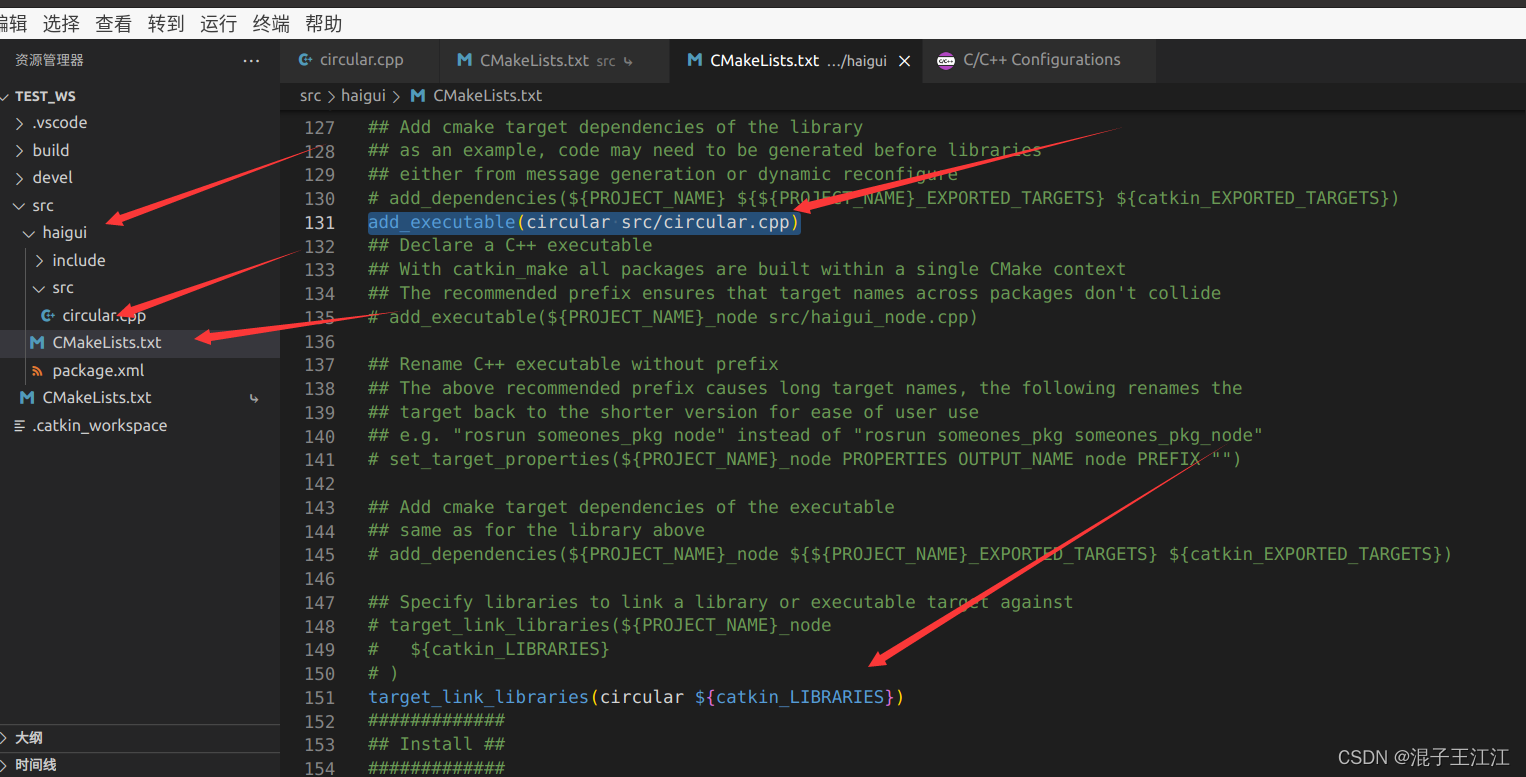
add_executable(circular src/circular.cpp)
target_link_libraries(circular ${catkin_LIBRARIES})
- 测试:
退回到test_ws下的目录进行编译,使得代码生效。
依次打开下面三个终端进行测试:
roscore
输入上面的命令启动ros
rosrun turtlesim turtlesim_node
运行小海龟
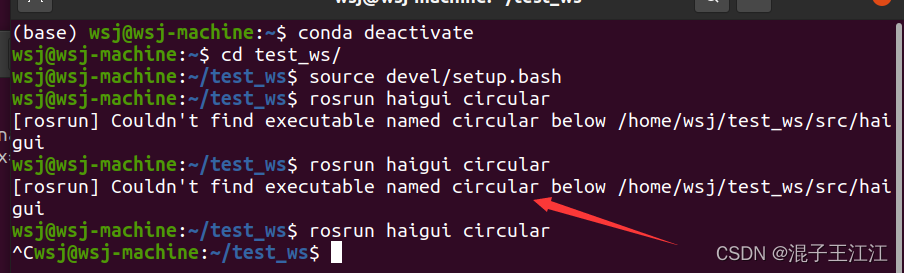
cd ~/test_ws/ //进入工作空间
source devel/setup.bash //设置环境
rosrun haigui circular
- 效果:
ros小海龟
三、总结
其实假期阶段已经安装过ros2,只不过当时是使用别的up主封装好的一键安装的方法,简单省事。现在又重新一步步进行下载安装感觉就是对ros的内在的一些操作理解更加透彻。尤其是遇到各种各样的问题,进一步提高了解决问题的能力。但是,在我入门过ros2后,感觉ros让我不是很舒服,可能还没适应,老是感觉ros2更好用,命令也好记,以上就是ros的初体验。
四、参考
ROS通信实操(小乌龟通信实现)(九)C++、Python
详细介绍如何在ubuntu20.04中安装ROS系统,超快完成安装(最新版教程)