Ros机器人之(二)两个小海龟画圈圈
对于一个新的领域,毫无头绪,从学习基础知识开始,不可焦虑急躁。
今天主要通过小海龟,讲一下Ros入门的基础知识,慢慢学习。
打开Ros
roscore
打开小海龟
rosrun turtlesim turtlesim_node
打开小海龟键盘控制
rosrun turtlesim turtle_teleop_key
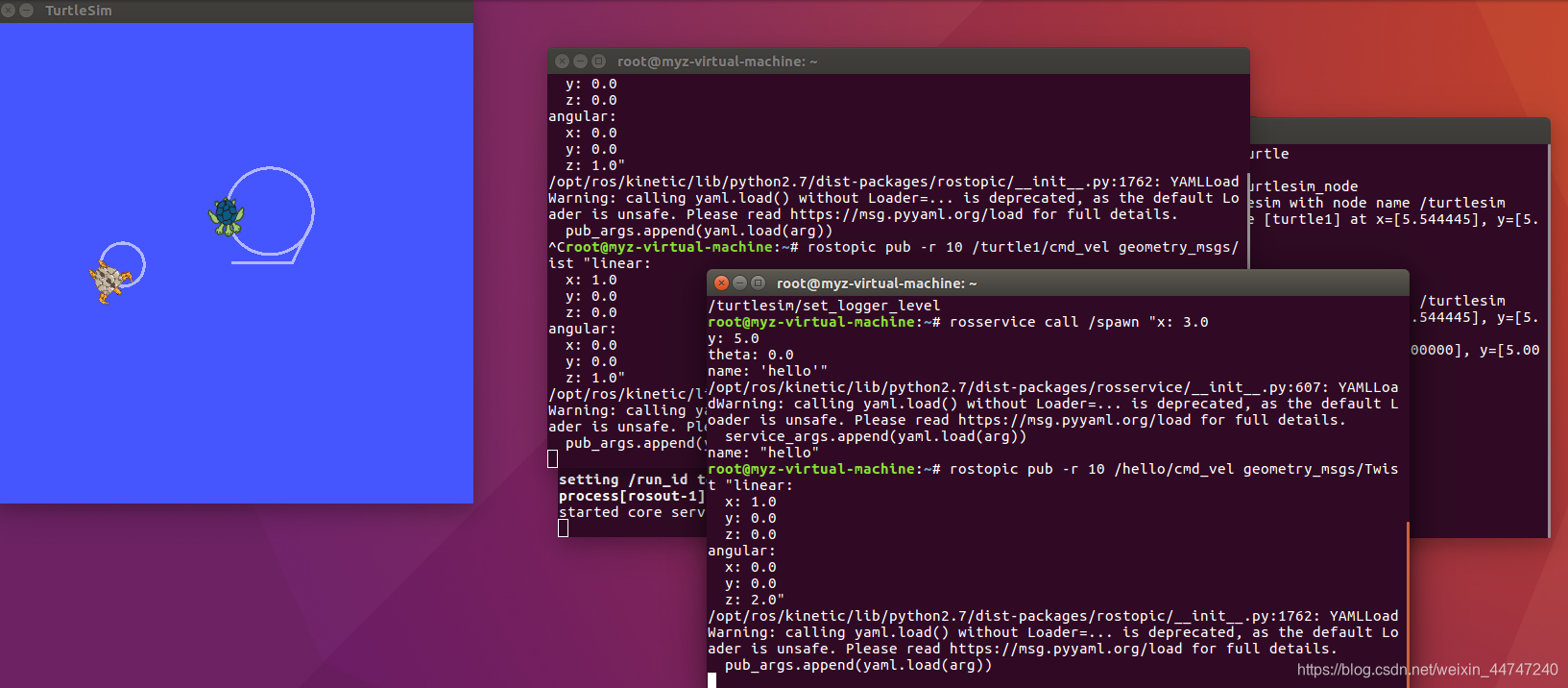
指令发布
#小海龟转圈圈,设置线速度和角速度,r设置每秒发送次数
rostopic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"
创建新的小海龟
rosservice call /spawn "x: 3.0
y: 5.0
theta: 0.0
name: 'hello'"
新的小海龟转圈圈
rostopic pub -r 10 /hello/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 2.0"
可视化系统图
rqt_graph

显示节点列表
rosnode list

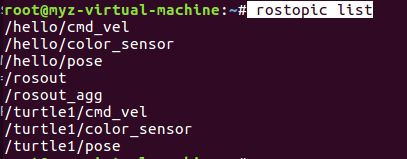
显示话题列表
rostopic list
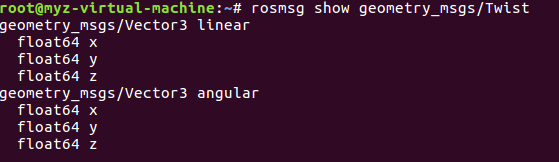
显示话题定义
rosmsg show geometry_msgs/Twist
显示服务列表

记录话题
小海龟转圈
# -a表示 all,-o表示选择记录文件名
rosbag record -a -o cmd_record
话题复现
rosbag play cmd_record.bag

