目录
前文已经在Unity中,将3自由度机械臂的数学模型实现出来了,现在我们将它实际应用于机械臂中。选用的机械臂3D模型是ABB IRB 4600工业机器人,来自AssetStore。


(图片来自ABB官网)
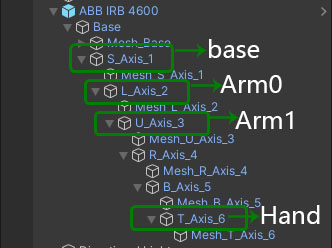
1. ABB机械臂形态
模型中总共有六个旋转轴,为了继承上一章内容和分析方法,仅使用其中的3个自由度。

2. ABB机械臂数学模型分析
但是与上一章的数学模型不同的是,这里的base和Arm0两个节点坐标不同,因此在上一章的基础上,需要分两步来考虑:
第一步:以base为原点来计算θ3,这一步与上一章相同;

![]()
![]() 或者θ3=arctan(x/z)
或者θ3=arctan(x/z)
第二步:以Arm0为原点计算θ1和θ2。
这里用二维图作示意,将坐标轴偏移一个距离,这时候Target的坐标变成了与Arm0节点的差值(x',y',z')
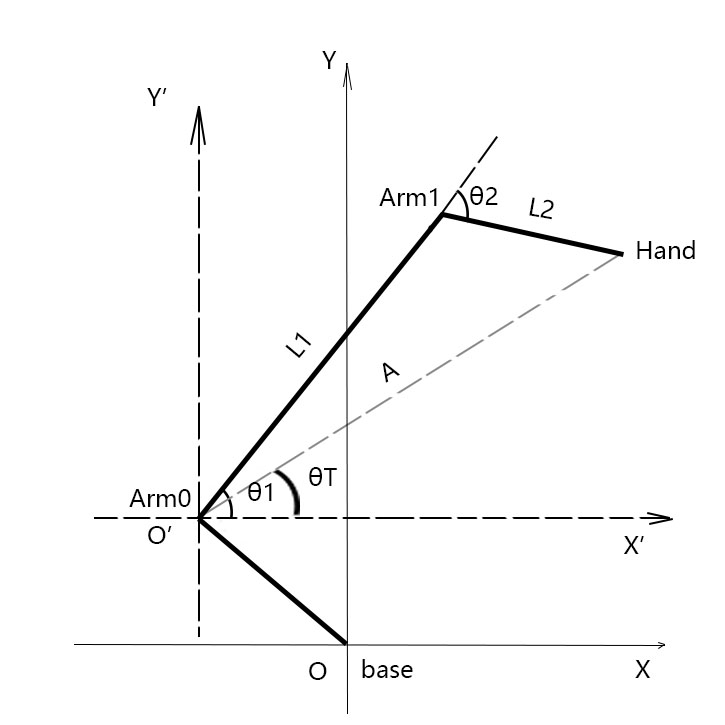
按照上一章的计算方式,重新计算W‘、A'、θT、θ2、θ1:

![]()
![]()
![]()
![]()
![]()
3. 初步程序实现
1. 准备工作:首先要拿到上述计算需要用到的变量:
public Transform Base,Arm0,Arm1,Hand,Target;
float X, Y, Z; //记录目标Target的位置,相对于Base
float x_plus, y_plus, z_plus; //Target的位置,相对于Arm0
private float L1,L2;
private float sita_1, sita_2, sita_3, sita_T, W, A;2. 准备工作:计算出L1、L2的值,这是固定不变的
L1 = Vector3.Distance(Arm0.position, Arm1.position);
L2 = Vector3.Distance(Arm1.position, Hand.position);3. 先在以base为原点的坐标系中计算出θ3,套公式:
X = Target.position.x - Base.transform.position.x;
Y = Target.position.y - Base.transform.position.y;
Z = Target.position.z - Base.transform.position.z;
sita_3 = Mathf.Atan2(X, Z);
sita_3 = Mathf.Rad2Deg * sita_3;
4. 再以Arm0为原点,计算x',y',z',W‘、A'、θT、θ2、θ1,套公式:
x_plus = Target.position.x - Arm0.position.x;
y_plus = Target.position.y - Arm0.position.y;
z_plus = Target.position.z - Arm0.position.z;
W = Mathf.Sqrt(square(x_plus) + square(z_plus));
A = Mathf.Sqrt(square(W) + square(y_plus));
sita_T = Mathf.Acos(W / A);
sita_1 = Mathf.Acos((square(L1) + square(W) + square(y_plus) - square(L2)) / (2 * L1 * A)) + sita_T;
sita_2 = Mathf.Acos((square(W) + square(y_plus) - square(L1) - square(L2)) / (2 * L1 * L2));
sita_1 *= Mathf.Rad2Deg;
sita_2 *= Mathf.Rad2Deg;好了,运行试试看:
结果中可以看到,虽然机械臂随着Target移动,但是却有一定的误差:Target和手爪之间错位了一段距离。这是为什么呢?下面分析一下误差产生的原因。
4. 误差分析
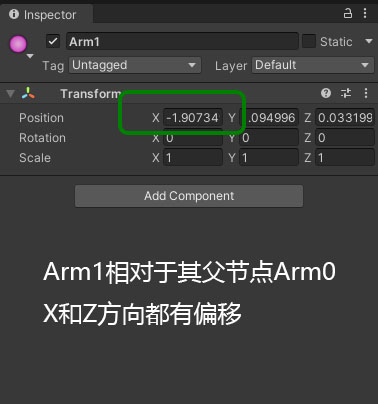
将这几个旋转节点单独拿出来观察,从XY平面来看,在机械臂的初始状态,Arm0到Arm1,以及Arm1到Hand,并不是完全地与Y轴平行的,XZ平面也是如此。这一点从Arm0和Arm1的本地坐标上也能看出来。但上述数学模型是简化了的,没有考虑到这些问题。

因此,在一开始还需要计算出初始角度,并在之后实际旋转时减去。sita_L1和sita_L2分别是两条手臂L1和L2的初始偏移角度。
sita_L1 =(Mathf.Asin(Arm1.localPosition.x / L1))*Mathf.Rad2Deg;
var temp = Hand.position.x - Arm1.position.x;
sita_L2=(Mathf.Asin(temp/ L2)) * Mathf.Rad2Deg;5. 最终实现
完整代码如下:
public Transform Base,Arm0,Arm1,Hand,Target;
float X, Y, Z; //记录目标Target的位置,相对于Base
float x_plus, y_plus, z_plus; //Target的位置,相对于Arm0
private float L1,L2;
private float sita_1, sita_2, sita_3, sita_T, W, A;
private float sita_L1, sita_L2;//L1、L2初始位置的偏移角
void Start()
{ //在ABB机械臂中,L1改成(S_Axis_2)到Arm1节点(U_Axis_3)的距离
L1 = Vector3.Distance(Arm0.position, Arm1.position);
L2 = Vector3.Distance(Arm1.position, Hand.position);
sita_L1 =(Mathf.Asin(Arm1.localPosition.x / L1))*Mathf.Rad2Deg;
var temp = Hand.position.x - Arm1.position.x;
sita_L2=(Mathf.Asin(temp/ L2)) * Mathf.Rad2Deg;
Debug.Log(String.Format("{0:N6}",sita_L1));//保留六位小数
Debug.Log(String.Format("{0:N6}", sita_L2));
}
void Update()
{
X = Target.position.x - Base.transform.position.x;
Y = Target.position.y - Base.transform.position.y;
Z = Target.position.z - Base.transform.position.z;
sita_3 = Mathf.Atan2(X, Z);
sita_3 = Mathf.Rad2Deg * sita_3;
Vector3 Euler3 = transform.localEulerAngles;
Euler3.y = sita_3-90;//实际是从z轴正方向开始的旋转
Base.transform.localEulerAngles = Euler3;
//Sita_3旋转完成后,开始计算从Arm0为坐标原点的sita_1和sita_2
x_plus = Target.position.x - Arm0.position.x;
y_plus = Target.position.y - Arm0.position.y;
z_plus = Target.position.z - Arm0.position.z;
//重新计算W和A
W = Mathf.Sqrt(square(x_plus) + square(z_plus));
A = Mathf.Sqrt(square(W) + square(y_plus)); //A的长度=根号(W平方+Y平方)
sita_T = Mathf.Acos(W / A); //辅助角T
sita_1 = Mathf.Acos((square(L1) + square(W) + square(y_plus) - square(L2)) / (2 * L1 * A)) + sita_T;
sita_2 = Mathf.Acos((square(W) + square(y_plus) - square(L1) - square(L2)) / (2 * L1 * L2));
sita_1 *= Mathf.Rad2Deg;
sita_2 *= Mathf.Rad2Deg;
Vector3 euler1 = Arm0.transform.localEulerAngles;
euler1.z = -(90-sita_1+sita_L1);
Arm0.localEulerAngles = euler1;
Vector3 euler2 = Arm1.transform.localEulerAngles;
euler2.z = -(sita_2- sita_L2);
Arm1.localEulerAngles = euler2;
Debug.Log("hand的位置:"+Hand.position);
}
static float square(float f)
{
return f * f;
}
或者在旋转时加入球形插值,让它转得丝滑一些。