目的:在传统的向量叉乘计算中,常常遇到叉乘。定义为向量。其这个向量方向满足右手定则。它的模大小,一般被忽略。因此推测一下。
向量叉乘定义:
外积(英语:Cross product)又称向量积(英语:Vector product),是对三维空间中的两个向量的二元运算,用符号: × \times ×表示。可以定义为:
a → × b → = c → ( 1 ) \overrightarrow{a} \times \overrightarrow{b} = \overrightarrow{c} \space \space \space \space(1) a×b=c (1)
假设两个向量 a → × b → \overrightarrow{a} \times \overrightarrow{b} a×b外积,它的方向为 c → \overrightarrow{c} c。其方向由右手定则决定。模长等于这两个向量边的平行四边形的面积。
它的定义也可以写成:
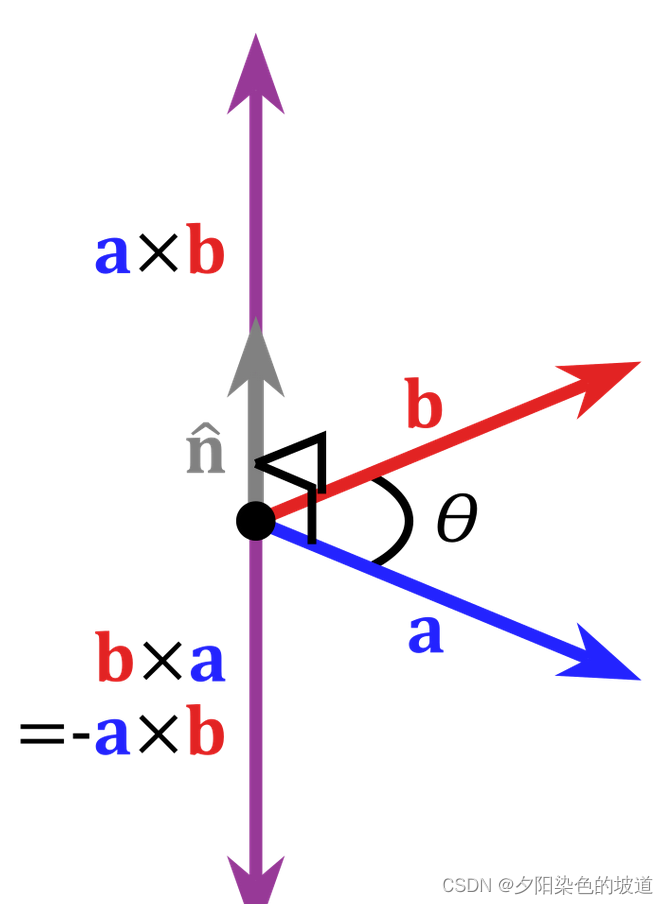
a → × b → = ∣ a → ∣ ∣ b → ∣ s i n ( θ ) n → ( 2 ) \overrightarrow{a} \times \overrightarrow{b} = |\overrightarrow{a}||\overrightarrow{b}|sin(\theta)\overrightarrow{n} \space \space \space \space(2) a×b=∣a∣∣b∣sin(θ)n (2)
其中 θ \theta θ为两个向量的夹角 0 ≤ θ ≤ 180 0\le \theta \le 180 0≤θ≤180; ∣ a → ∣ ∣ b → ∣ |\overrightarrow{a}||\overrightarrow{b}| ∣a∣∣b∣分别为两个向量 a → b → \overrightarrow{a} \overrightarrow{b} ab的模长。 n → \overrightarrow{n} n为垂直于 a → b → \overrightarrow{a} \overrightarrow{b} ab所在平面的法向量,且它满足右手定则。如下图:
上面的定义很好理解。但是一般在代数计算两个向量的叉乘,会用到行列式计算。就如一组单位积 ( i → , j → , k → ) (\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}) (i,j,k);其中 a → = a 0 i → + a 1 j → + a 2 k → \overrightarrow{a}=a_0\overrightarrow{i}+a_1\overrightarrow{j}+a_2\overrightarrow{k} a=a0i+a1j+a2k; b → = b 0 i → + b 1 j → + b 2 k → \overrightarrow{b}=b_0\overrightarrow{i}+b_1\overrightarrow{j}+b_2\overrightarrow{k} b=b0i+b1j+b2k
在计算两个向量的叉乘时候,一般用代数方法为:
a → × b → = ( a 0 i → + a 1 j → + a 2 k → ) × ( b → = b 0 i → + b 1 j → + b 2 k → ) = a 0 b 0 ( i → × i → ) + a 0 b 1 ( i → × j → ) + a 0 b 2 ( i → × k → ) + a 1 b 0 ( j → × i → ) + a 1 b 1 ( j → × j → ) + a 1 b 2 ( j → × k → ) + a 2 b 0 ( k → × i → ) + a 2 b 1 ( k → × j → ) + a 2 b 2 ( k → × k → ) ( 3 ) \overrightarrow{a} \times \overrightarrow{b} = (a_0\overrightarrow{i}+a_1\overrightarrow{j}+a_2\overrightarrow{k}) \times(\overrightarrow{b}=b_0\overrightarrow{i}+b_1\overrightarrow{j}+b_2\overrightarrow{k}) \\ = a_0b_0(\overrightarrow{i} \times \overrightarrow{i}) + a_0b_1(\overrightarrow{i} \times \overrightarrow{j}) + a_0b_2(\overrightarrow{i} \times \overrightarrow{k})+ \\ a_1b_0(\overrightarrow{j} \times \overrightarrow{i}) + a_1b_1(\overrightarrow{j} \times \overrightarrow{j}) + a_1b_2(\overrightarrow{j} \times \overrightarrow{k}) + \\ a_2b_0(\overrightarrow{k} \times \overrightarrow{i}) + a_2b_1(\overrightarrow{k} \times \overrightarrow{j}) + a_2b_2(\overrightarrow{k} \times \overrightarrow{k}) \space \space \space \space(3) a×b=(a0i+a1j+a2k)×(b=b0i+b1j+b2k)=a0b0(i×i)+a0b1(i×j)+a0b2(i×k)+a1b0(j×i)+a1b1(j×j)+a1b2(j×k)+a2b0(k×i)+a2b1(k×j)+a2b2(k×k) (3)
因为基向量 ( i → , j → , k → ) (\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}) (i,j,k)两两垂直,且为单位向量。 0 → \overrightarrow{0} 0 表示都为 0 0 0的向量。所以得到:
i → × i → = 0 → ( 4 ) j → × j → = 0 → ( 5 ) k → × k → = 0 → ( 6 ) i → × j → = k → ( 7 ) j → × k → = i → ( 8 ) k → × i → = j → ( 9 ) \overrightarrow{i} \times \overrightarrow{i}= \overrightarrow{0} \space \space \space \space(4) \\ \overrightarrow{j} \times \overrightarrow{j}= \overrightarrow{0} \space \space \space \space(5) \\ \overrightarrow{k} \times \overrightarrow{k}=\overrightarrow{0} \space \space \space \space(6) \\ \overrightarrow{i} \times \overrightarrow{j}= \overrightarrow{k} \space \space \space \space(7) \\ \overrightarrow{j} \times \overrightarrow{k}= \overrightarrow{i} \space \space \space \space(8)\\ \overrightarrow{k} \times \overrightarrow{i}= \overrightarrow{j} \space \space \space \space(9) i×i=0 (4)j×j=0 (5)k×k=0 (6)i×j=k (7)j×k=i (8)k×i=j (9)
将 ( 4 ) ( 5 ) ( 6 ) ( 7 ) ( 8 ) ( 9 ) (4)(5)(6)(7)(8)(9) (4)(5)(6)(7)(8)(9)代入公式 ( 3 ) (3) (3)得到如下:
a → × b → = − a 0 b 0 0 → + a 0 b 1 k → − a 0 b 2 j → − a 1 b 0 k → − a 1 b 1 0 → + a 1 b 2 i → + a 2 b 0 j → − a 2 b 1 i → − a 2 b 2 0 → = ( a 1 b 2 − a 2 b 1 ) i → + ( a 2 b 0 − a 0 b 2 ) j → + ( a 0 b 1 − a 1 b 0 ) k → ( 10 ) \overrightarrow{a} \times \overrightarrow{b} = -a_0b_0\overrightarrow{0}+a_0b_1\overrightarrow{k}-a_0b_2\overrightarrow{j} \\ - a_1b_0\overrightarrow{k}-a_1b_1\overrightarrow{0} +a_1b_2\overrightarrow{i} \\ +a_2b_0 \overrightarrow{j} - a_2b_1\overrightarrow{i} -a_2b_2\overrightarrow{0}\\ =(a_1b_2-a_2b_1)\overrightarrow{i} + (a_2b_0-a_0b_2)\overrightarrow{j} +(a_0b_1-a_1b_0)\overrightarrow{k} \space \space \space \space(10) a×b=−a0b00+a0b1k−a0b2j−a1b0k−a1b10+a1b2i+a2b0j−a2b1i−a2b20=(a1b2−a2b1)i+(a2b0−a0b2)j+(a0b1−a1b0)k (10)
公式的 ( 10 ) (10) (10),在日常用行列式计算表达。使用 ( i → , j → , k → ) (\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}) (i,j,k)的矩阵余子式计算方式。它和代数计算方式相等。
a → × b → = [ i → j → k → a 0 a 1 a 2 b 0 b 1 b 2 ] = ( a 1 b 2 − a 2 b 1 ) i → + ( a 2 b 0 − a 0 b 2 ) j → + ( a 0 b 1 − a 1 b 0 ) k → \overrightarrow{a} \times \overrightarrow{b} =\begin{bmatrix} \overrightarrow{i} & \overrightarrow{j} & \overrightarrow{k} \\ a_0& a_1 & a_2 \\ b_0& b_1 & b_2 \end{bmatrix} = (a_1b_2-a_2b_1)\overrightarrow{i} + (a_2b_0-a_0b_2)\overrightarrow{j} +(a_0b_1-a_1b_0)\overrightarrow{k} a×b=⎣
⎡ia0b0ja1b1ka2b2⎦
⎤=(a1b2−a2b1)i+(a2b0−a0b2)j+(a0b1−a1b0)k
因为它为基向量,在欧式几何中,它的表达为:
i → = [ 1 0 0 ] ; j → = [ 0 1 0 ] ; k → = [ 0 0 1 ] ( 11 ) \overrightarrow{i}=\begin{bmatrix} 1 \\ 0 \\ 0 \end{bmatrix}; \overrightarrow{j}=\begin{bmatrix} 0 \\ 1 \\ 0 \end{bmatrix};\overrightarrow{k}=\begin{bmatrix} 0 \\ 0 \\ 1 \end{bmatrix} \space \space \space \space(11) i=⎣
⎡100⎦
⎤;j=⎣
⎡010⎦
⎤;k=⎣
⎡001⎦
⎤ (11)
因此 ( 11 ) (11) (11)代入到 ( 10 ) (10) (10)得到:
a → × b → = [ a 1 b 2 − a 2 b 1 a 2 b 0 − a 0 b 2 a 0 b 1 − a 1 b 0 ] ( 12 ) \overrightarrow{a} \times \overrightarrow{b} = \begin{bmatrix} a_1b_2-a_2b_1 \\ a_2b_0-a_0b_2 \\ a_0b_1-a_1b_0 \end{bmatrix} \space \space \space \space(12) a×b=⎣
⎡a1b2−a2b1a2b0−a0b2a0b1−a1b0⎦
⎤ (12)
上面是基于基向量的表达,它和上面的公式对应,因此可以得到:
a → × b → = ∣ a → ∣ ∣ b → ∣ s i n ( θ ) n → = [ a 1 b 2 − a 2 b 1 a 2 b 0 − a 0 b 2 a 0 b 1 − a 1 b 0 ] ( 13 ) \overrightarrow{a} \times \overrightarrow{b} = |\overrightarrow{a}||\overrightarrow{b}|sin(\theta)\overrightarrow{n} =\begin{bmatrix} a_1b_2-a_2b_1 \\ a_2b_0-a_0b_2 \\ a_0b_1-a_1b_0 \end{bmatrix} \space \space \space \space(13) a×b=∣a∣∣b∣sin(θ)n=⎣
⎡a1b2−a2b1a2b0−a0b2a0b1−a1b0⎦
⎤ (13)
在一些应用,经常向量的表示转化为矩阵的运算。因此(13)公式可以表示矩阵和向量的乘法。
a → × b → = ∣ a → ∣ ∣ b → ∣ s i n ( θ ) n → = [ a 1 b 2 − a 2 b 1 a 2 b 0 − a 0 b 2 a 0 b 1 − a 1 b 0 ] = [ 0 − a 2 a 1 a 2 0 − a 0 − a 1 a 0 0 ] [ b 0 b 1 b 2 ] = a → × b → ( 14 ) \overrightarrow{a} \times \overrightarrow{b} = |\overrightarrow{a}||\overrightarrow{b}|sin(\theta)\overrightarrow{n} =\begin{bmatrix} a_1b_2-a_2b_1 \\ a_2b_0-a_0b_2 \\ a_0b_1-a_1b_0 \end{bmatrix} = \begin{bmatrix} 0 & -a_2 & a_1 \\ a_2& 0 & -a_0 \\ -a_1& a_0 & 0 \end{bmatrix} \begin{bmatrix} b_0 \\ b_1 \\ b_2 \end{bmatrix} = \overrightarrow{a} \times \overrightarrow{b} \space \space \space \space(14) a×b=∣a∣∣b∣sin(θ)n=⎣
⎡a1b2−a2b1a2b0−a0b2a0b1−a1b0⎦
⎤=⎣
⎡0a2−a1−a20a0a1−a00⎦
⎤⎣
⎡b0b1b2⎦
⎤=a×b (14)
两个向量的叉乘仅仅在三维空间有定义。在二维空间没有定义。
下面介绍向量的行列式和向量组成的平行四边形面积的关系。
假设 a → , b → \overrightarrow{a} ,\overrightarrow{b} a,b为二维向量。这样易于解释。因此画图如下:
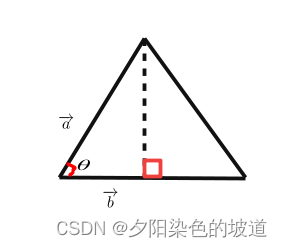
计算三角形面积为:
∣ a r e a ∣ = 1 2 ∣ a → ∣ ∣ b → ∣ s i n ( θ ) ( 15 ) |area|=\cfrac{1}{2}|\overrightarrow{a}||\overrightarrow{b}|sin(\theta) \space \space \space \space(15) ∣area∣=21∣a∣∣b∣sin(θ) (15)
转化一下表达,因为 s i n ( θ ) sin(\theta) sin(θ)不好计算,需要计算 c o s ( θ ) cos(\theta) cos(θ)。
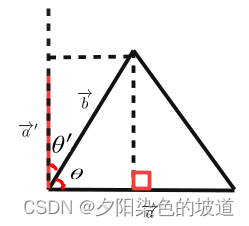
其中 ∣ a → ′ ∣ = ∣ a → ∣ |\overrightarrow{a}'|=|\overrightarrow{a}| ∣a′∣=∣a∣; ∣ b → ∣ s i n ( θ ) = ∣ b → ′ ∣ c o s ( θ ′ ) |\overrightarrow{b}|sin(\theta)=|\overrightarrow{b}'|cos(\theta') ∣b∣sin(θ)=∣b′∣cos(θ′);
∣ a r e a ∣ = 1 2 ∣ a → ∣ ∣ b → ∣ s i n ( θ ) = 1 2 ∣ b → ∣ ∣ a → ∣ c o s ( θ ′ ) ( 16 ) |area|=\cfrac{1}{2}|\overrightarrow{a}||\overrightarrow{b}|sin(\theta)=\cfrac{1}{2}|\overrightarrow{b}||\overrightarrow{a}|cos(\theta') \space \space \space \space(16) ∣area∣=21∣a∣∣b∣sin(θ)=21∣b∣∣a∣cos(θ′) (16)
其中 θ ′ + θ = 90 \theta'+\theta=90 θ′+θ=90.且 ∣ a → ′ ∣ = ∣ a → ∣ |\overrightarrow{a}'|=|\overrightarrow{a}| ∣a′∣=∣a∣,容易得到公式简化,简化上述等式为:
∣ a r e a ∣ = 1 2 ∣ b → ∣ ∣ a → ′ ∣ c o s ( θ ′ ) = 1 2 b → ⋅ a → ′ = 1 2 a → ′ ⋅ b → ( 17 ) |area|=\cfrac{1}{2}|\overrightarrow{b}||\overrightarrow{a}'|cos(\theta')=\cfrac{1}{2}\overrightarrow{b} \cdot \overrightarrow{a}'=\cfrac{1}{2}\overrightarrow{a}' \cdot \overrightarrow{b} \space \space \space \space(17) ∣area∣=21∣b∣∣a′∣cos(θ′)=21b⋅a′=21a′⋅b (17)
因为 a → ′ \overrightarrow{a}' a′是通过 a → \overrightarrow{a} a旋转90度得到的,如下图。
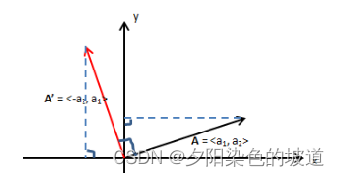
因此假设 a → = [ a 0 a 1 ] \overrightarrow{a}=\begin{bmatrix} a_0 \\ a_1 \end{bmatrix} a=[a0a1] 得到 a → ′ = [ − a 1 a 0 ] \overrightarrow{a}'=\begin{bmatrix} -a_1 \\ a_0 \end{bmatrix} a′=[−a1a0]
因此得到公式:
2 ∣ a r e a ∣ = a → ′ ⋅ b → = [ − a 1 a 0 ] ⋅ [ b 0 b 1 ] = a 0 b 1 − a 1 b 0 ( 18 ) 2|area|=\overrightarrow{a}' \cdot \overrightarrow{b}=\begin{bmatrix} -a_1 \\ a_0 \end{bmatrix} \cdot \begin{bmatrix} b_0 \\ b_1 \end{bmatrix} = a_0b_1-a_1b_0 \space \space \space \space(18) 2∣area∣=a′⋅b=[−a1a0]⋅[b0b1]=a0b1−a1b0 (18)
可以看到行列式是面积的表达。
2 ∣ a r e a ∣ = ∣ a 0 a 1 b 0 b 1 ∣ 2|area|=\begin{vmatrix} a_0 & a_1 \\ b_0 & b_1 \end{vmatrix} 2∣area∣=∣
∣a0b0a1b1∣
∣