历史地位
2012 年,Alex Krizhevsky、Ilya Sutskever 在多伦多大学 Geoff Hinton 的实验室设计出了一个深层的卷积神经网络 AlexNet,夺得了 2012 年 ImageNet LSVRC 的冠军,且准确率远超第二名(top5 错误率为 15.3%,第二名为 26.2%),引起了很大的轰动。AlexNet 可以说是具有历史意义的一个网络结构,在此之前,深度学习已经沉寂了很长时间,自 2012 年 AlexNet 诞生之后,后面的 ImageNet 冠军都是用卷积神经网络(CNN)来做的,并且层次越来越深,使得 CNN 成为在图像识别分类的核心算法模型,带来了深度学习的大爆发。
基本原理
一、AlexNet 模型的特点
AlexNet 之所以能够成功,跟这个模型设计的特点有关,主要有:
使用了非线性激活函数:ReLU
防止过拟合的方法:Dropout,数据扩充(Data augmentation)
其他:多 GPU 实现,LRN 归一化层的使用
AlexNet 的特点和创新之处,主要如下:

使用 ReLU 激活函数
传统的神经网络普遍使用 Sigmoid 或者 tanh 等非线性函数作为激励函数,然而它们容易出现梯度弥散或梯度饱和的情况。以 Sigmoid 函数为例,当输入的值非常大或者非常小的时候,这些神经元的梯度接近于 0(梯度饱和现象),如果输入的初始值很大的话,梯度在反向传播时因为需要乘上一个 Sigmoid 导数,会造成梯度越来越小,导致网络变的很难学习。(详见本公博客的文章:深度学习中常用的激励函数)。
在 AlexNet 中,使用了 ReLU (Rectified Linear Units,矫正线性函数)激励函数,该函数的公式为: f ( x ) = max ( 0 , x ) f(x)=\max (0, x) f(x)=max(0,x),当输入信号 < 0 时,输出都是 0,当输入信号 > 0 时,输出等于输入,如下图所示:
局部归一化(Local Response Normalization,简称 LRN)
在神经生物学有一个概念叫做 “侧抑制”(lateral inhibitio),指的是被激活的神经元抑制相邻神经元。归一化(normalization)的目的是 “抑制”,局部归一化就是借鉴了 “侧抑制” 的思想来实现局部抑制,尤其当使用 ReLU 时这种 “侧抑制” 很管用,因为 ReLU 的响应结果是无界的(可以非常大),所以需要归一化。使用局部归一化的方案有助于增加泛化能力。
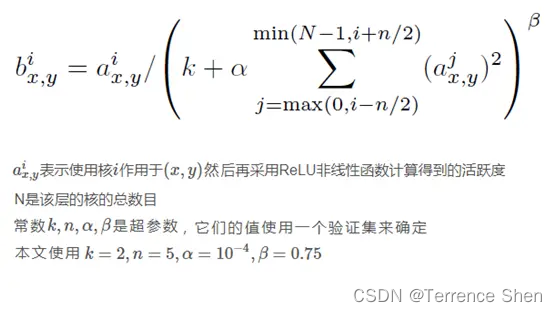
LRN 的公式如下,核心思想就是利用临近的数据做归一化,这个策略贡献了 1.2% 的 Top-5 错误率。
b x , y i = a x , y i / ( k + α ∑ j = max ( 0 , i − n / 2 ) min ( N − 1 , i + n / 2 ) ( a x , y j ) 2 ) β b_{x, y}^i=a_{x, y}^i /\left(k+\alpha \sum_{j=\max (0, i-n / 2)}^{\min (N-1, i+n / 2)}\left(a_{x, y}^j\right)^2\right)^\beta bx,yi=ax,yi/
k+αj=max(0,i−n/2)∑min(N−1,i+n/2)(ax,yj)2
β
Dropout
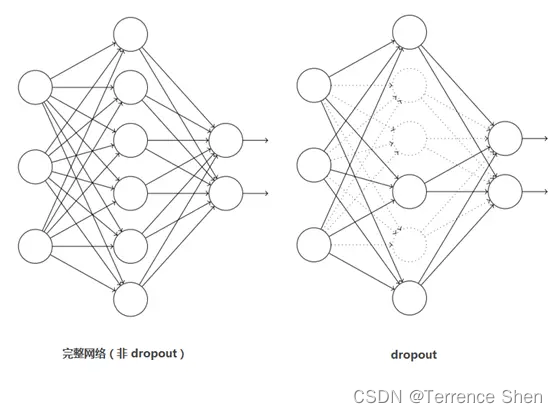
引入 Dropout 主要是为了防止过拟合。在神经网络中 Dropout 通过修改神经网络本身结构来实现,对于某一层的神经元,通过定义的概率将神经元置为 0,这个神经元就不参与前向和后向传播,就如同在网络中被删除了一样,同时保持输入层与输出层神经元的个数不变,然后按照神经网络的学习方法进行参数更新。在下一次迭代中,又重新随机删除一些神经元(置为 0),直至训练结束。
Dropout 应该算是 AlexNet 中一个很大的创新,以至于 “神经网络之父” Hinton 在后来很长一段时间里的演讲中都拿 Dropout 说事。Dropout 也可以看成是一种模型组合,每次生成的网络结构都不一样,通过组合多个模型的方式能够有效地减少过拟合,Dropout 只需要两倍的训练时间即可实现模型组合(类似取平均)的效果,非常高效。
如下图所示:
重叠池化 (Overlapping Pooling)
一般的池化(Pooling)是不重叠的,池化区域的窗口大小与步长相同,如下图所示:
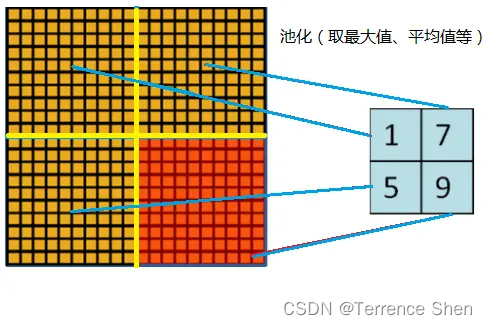
在 AlexNet 中使用的池化(Pooling)却是可重叠的,也就是说,在池化的时候,每次移动的步长小于池化的窗口长度。AlexNet 池化的大小为 3×3 的正方形,每次池化移动步长为 2,这样就会出现重叠。重叠池化可以避免过拟合,这个策略贡献了 0.3% 的 Top-5 错误率。
多 GPU 训练
AlexNet 当时使用了 GTX580 的 GPU 进行训练,由于单个 GTX 580 GPU 只有 3GB 内存,这限制了在其上训练的网络的最大规模,因此他们在每个 GPU 中放置一半核(或神经元),将网络分布在两个 GPU 上进行并行计算,大大加快了 AlexNet 的训练速度。
数据扩充(Data augmentation)
有一种观点认为神经网络是靠数据喂出来的,如果能够增加训练数据,提供海量数据进行训练,则能够有效提升算法的准确率,因为这样可以避免过拟合,从而可以进一步增大、加深网络结构。而当训练数据有限时,可以通过一些变换从已有的训练数据集中生成一些新的数据,以快速地扩充训练数据。
其中,最简单、通用的图像数据变形的方式:水平翻转图像,从原始图像中随机裁剪、平移变换,颜色、光照变换,如下图所示:

AlexNet 在训练时,在数据扩充(data augmentation)这样处理:
(1)随机裁剪,对 256×256 的图片进行随机裁剪到 224×224,然后进行水平翻转,相当于将样本数量增加了((256-224)^2)×2=2048 倍;
(2)测试的时候,对左上、右上、左下、右下、中间分别做了 5 次裁剪,然后翻转,共 10 个裁剪,之后对结果求平均。作者说,如果不做随机裁剪,大网络基本上都过拟合;
(3)对 RGB 空间做 PCA(主成分分析),然后对主成分做一个(0, 0.1)的高斯扰动,也就是对颜色、光照作变换,结果使错误率又下降了 1%。
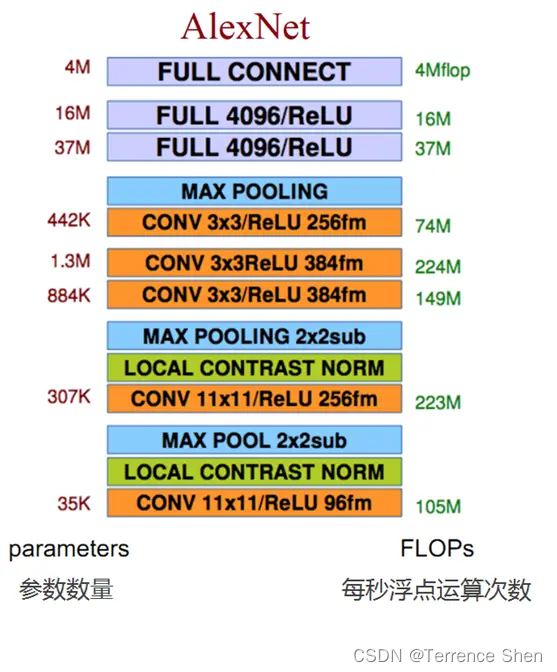
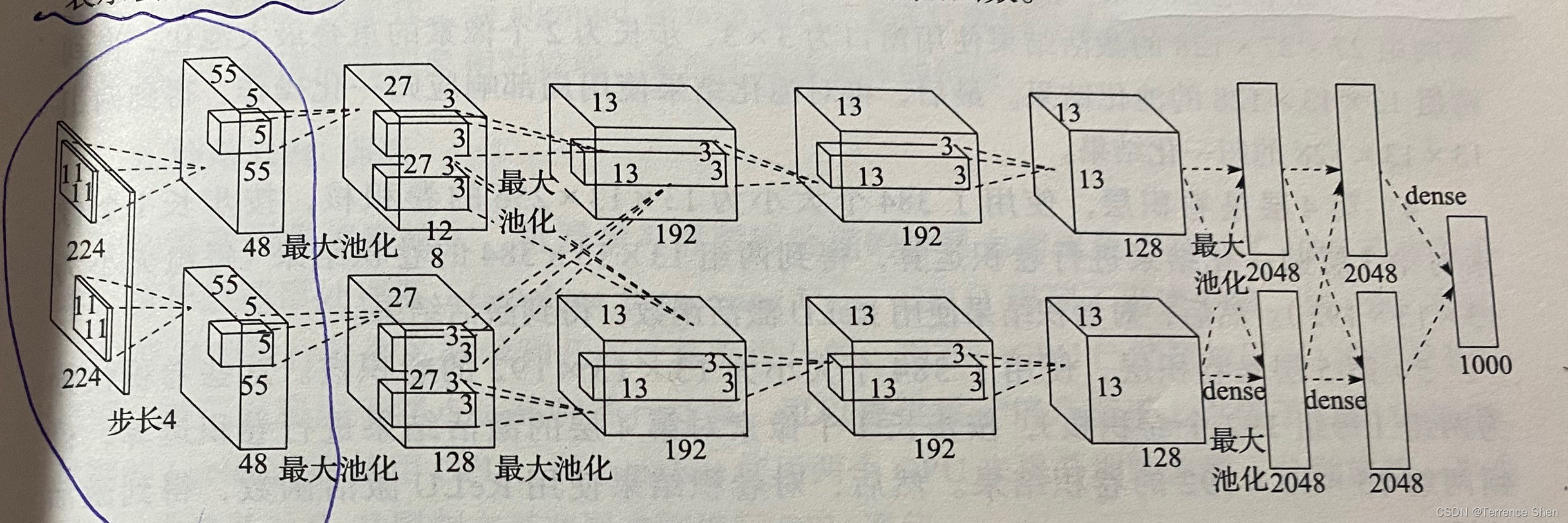
AlexNet 网络结构共有 8 层,前面 5 层是卷积层,后面 3 层是全连接层,最后一个全连接层的输出传递给一个 1000 路的 softmax 层,对应 1000 个类标签的分布。
由于 AlexNet 采用了两个 GPU 进行训练,因此,该网络结构图由上下两部分组成,一个 GPU 运行图上方的层,另一个运行图下方的层,两个 GPU 只在特定的层通信。例如第二、四、五层卷积层的核只和同一个 GPU 上的前一层的核特征图相连,第三层卷积层和第二层所有的核特征图相连接,全连接层中的神经元和前一层中的所有神经元相连接。

AlexNet 结构:
下图是 AlexNet 的网络结构图:
AlexNet 网络结构共有 8 层,前面 5 层是卷积层,后面 3 层是全连接层,最后一个全连接层的输出传递给一个 1000 路的 softmax 层,对应 1000 个类标签的分布。
由于 AlexNet 采用了两个 GPU 进行训练,因此,该网络结构图由上下两部分组成,一个 GPU 运行图上方的层,另一个运行图下方的层,两个 GPU 只在特定的层通信。例如第二、四、五层卷积层的核只和同一个 GPU 上的前一层的核特征图相连,第三层卷积层和第二层所有的核特征图相连接,全连接层中的神经元和前一层中的所有神经元相连接。
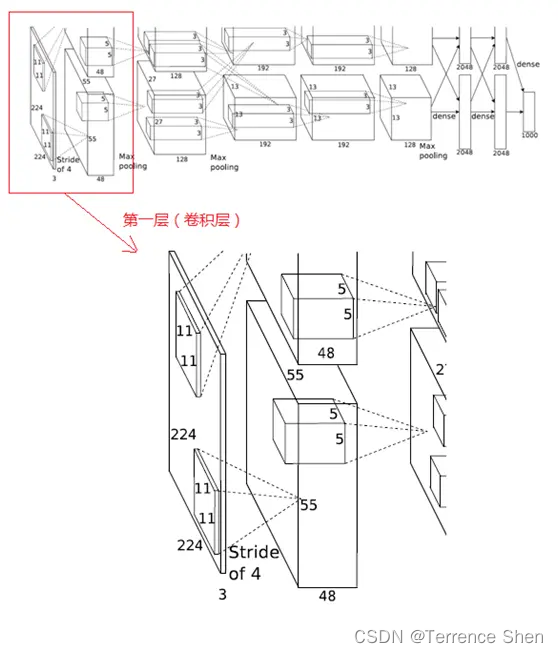
1、第一层(卷积层)
使用了96个大小为11X11的卷积核。
这些卷积核分为两组(每组48个卷积核),按照步长4个像素对输入层的图像进行卷积运算,得到两组55X55X48的卷积结果。
接着,进行激活函数的使用,
再对两组55X55X48的激活结果进行窗口为3X3、步长为2的重叠最大池化。
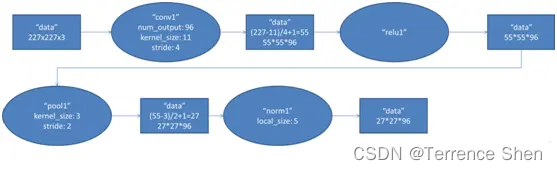
该层处理流程:卷积 -> ReLU -> 池化 -> 归一化,如下
(1)卷积
输入的原始图像大小为 224×224×3(RGB 图像),在训练时会经过预处理变为 227×227×3。在本层使用 96 个 11×11×3 的卷积核进行卷积计算,生成新的像素。由于采用了两个 GPU 并行运算,因此,网络结构图中上下两部分分别承担了 48 个卷积核的运算。
卷积核沿图像按一定的步长往 x 轴方向、y 轴方向移动计算卷积,然后生成新的特征图,其大小为:floor ((img_size - filter_size)/stride) +1 = new_feture_size,其中 floor 表示向下取整,img_size 为图像大小,filter_size 为核大小,stride 为步长,new_feture_size 为卷积后的特征图大小,这个公式表示图像尺寸减去卷积核尺寸除以步长,再加上被减去的核大小像素对应生成的一个像素,结果就是卷积后特征图的大小。
AlexNet 中本层的卷积移动步长是 4 个像素,卷积核经移动计算后生成的特征图大小为 (227-11)/4+1=55,即 55×55。
(2)ReLU
卷积后的 55×55 像素层经过 ReLU 单元的处理,生成激活像素层,尺寸仍为 2 组 55×55×48 的像素层数据。
(3)池化
RuLU 后的像素层再经过池化运算,池化运算的尺寸为 3×3,步长为 2,则池化后图像的尺寸为 (55-3)/2+1=27,即池化后像素的规模为 27×27×96
(4)归一化
池化后的像素层再进行归一化处理,归一化运算的尺寸为 5×5,归一化后的像素规模不变,仍为 27×27×96,这 96 层像素层被分为两组,每组 48 个像素层,分别在一个独立的 GPU 上进行运算。
2、第二层(卷积层)
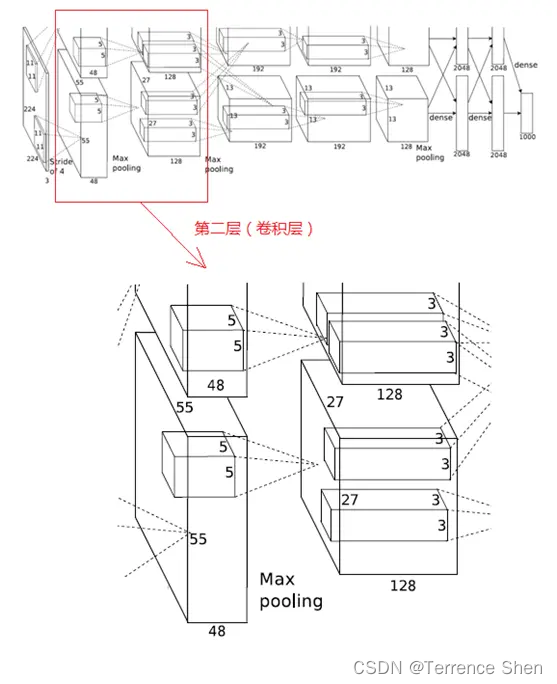
该层与第一层类似,处理流程为:卷积 -->ReLU–> 池化 --> 归一化,流程图如下:
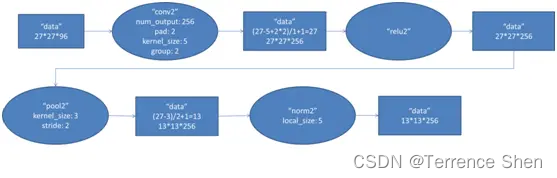
(1)卷积
第二层的输入数据为第一层输出的 27×27×96 的像素层(被分成两组 27×27×48 的像素层放在两个不同 GPU 中进行运算),为方便后续处理,在这里每幅像素层的上下左右边缘都被填充了 2 个像素(填充 0),即图像的大小变为 (27+2+2) ×(27+2+2)。第二层的卷积核大小为 5×5,移动步长为 1 个像素,跟第一层第(1)点的计算公式一样,经卷积核计算后的像素层大小变为 (27+2+2-5)/1+1=27,即卷积后大小为 27×27。
本层使用了 256 个 5×5×48 的卷积核,同样也是被分成两组,每组为 128 个,分给两个 GPU 进行卷积运算,结果生成两组 27×27×128 个卷积后的像素层。
(2)ReLU
这些像素层经过 ReLU 单元的处理,生成激活像素层,尺寸仍为两组 27×27×128 的像素层。
(3)池化
再经过池化运算的处理,池化运算的尺寸为 3×3,步长为 2,池化后图像的尺寸为 (57-3)/2+1=13,即池化后像素的规模为 2 组 13×13×128 的像素层
(4)归一化
然后再经归一化处理,归一化运算的尺度为 5×5,归一化后的像素层的规模为 2 组 13×13×128 的像素层,分别由 2 个 GPU 进行运算。
3、第三层(卷积层)
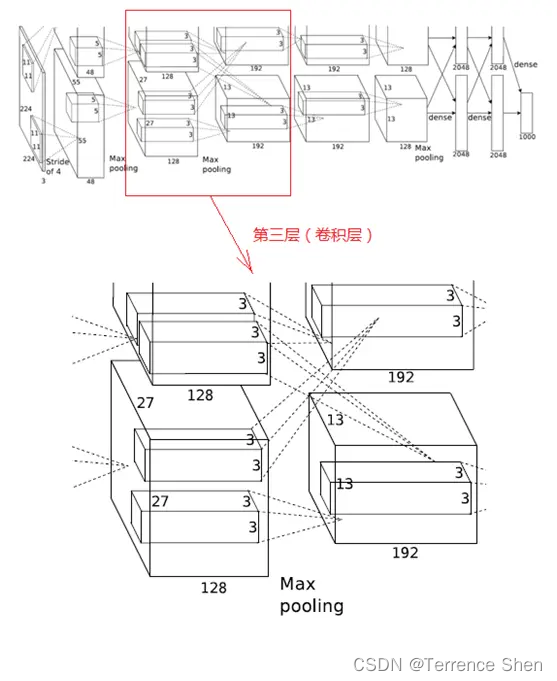
第三层的处理流程为:卷积 -->ReLU
(1)卷积
第三层输入数据为第二层输出的 2 组 13×13×128 的像素层,为便于后续处理,每幅像素层的上下左右边缘都填充 1 个像素,填充后变为 (13+1+1)×(13+1+1)×128,分布在两个 GPU 中进行运算。
这一层中每个 GPU 都有 192 个卷积核,每个卷积核的尺寸是 3×3×256。因此,每个 GPU 中的卷积核都能对 2 组 13×13×128 的像素层的所有数据进行卷积运算。如该层的结构图所示,两个 GPU 有通过交叉的虚线连接,也就是说每个 GPU 要处理来自前一层的所有 GPU 的输入。
本层卷积的步长是 1 个像素,经过卷积运算后的尺寸为 (13+1+1-3)/1+1=13,即每个 GPU 中共 13×13×192 个卷积核,2 个 GPU 中共有 13×13×384 个卷积后的像素层。
(2)ReLU
卷积后的像素层经过 ReLU 单元的处理,生成激活像素层,尺寸仍为 2 组 13×13×192 的像素层,分配给两组 GPU 处理。
4、第四层(卷积层)
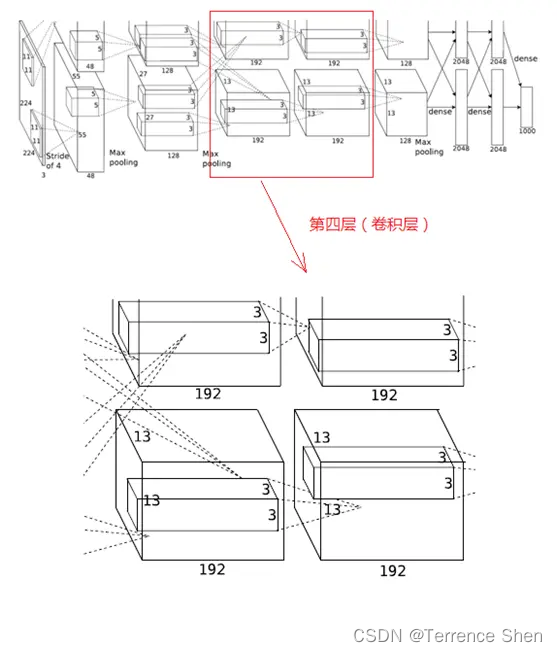
与第三层类似,第四层的处理流程为:卷积 -->ReLU

(1)卷积
第四层输入数据为第三层输出的 2 组 13×13×192 的像素层,类似于第三层,为便于后续处理,每幅像素层的上下左右边缘都填充 1 个像素,填充后的尺寸变为 (13+1+1)×(13+1+1)×192,分布在两个 GPU 中进行运算。
这一层中每个 GPU 都有 192 个卷积核,每个卷积核的尺寸是 3×3×192(与第三层不同,第四层的 GPU 之间没有虚线连接,也即 GPU 之间没有通信)。卷积的移动步长是 1 个像素,经卷积运算后的尺寸为 (13+1+1-3)/1+1=13,每个 GPU 中有 13×13×192 个卷积核,2 个 GPU 卷积后生成 13×13×384 的像素层。
(2)ReLU
卷积后的像素层经过 ReLU 单元处理,生成激活像素层,尺寸仍为 2 组 13×13×192 像素层,分配给两个 GPU 处理。
5、第五层(卷积层)
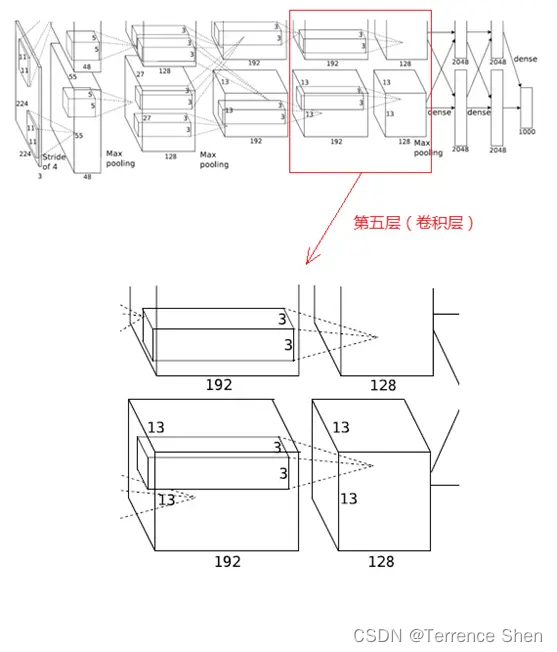
第五层的处理流程为:卷积 -->ReLU–> 池化
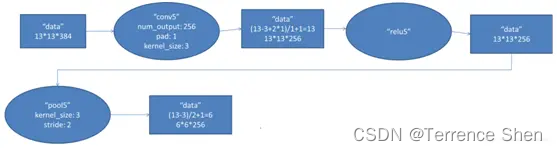
(1)卷积
第五层输入数据为第四层输出的 2 组 13×13×192 的像素层,为便于后续处理,每幅像素层的上下左右边缘都填充 1 个像素,填充后的尺寸变为 (13+1+1)×(13+1+1) ,2 组像素层数据被送至 2 个不同的 GPU 中进行运算。
这一层中每个 GPU 都有 128 个卷积核,每个卷积核的尺寸是 3×3×192,卷积的步长是 1 个像素,经卷积后的尺寸为 (13+1+1-3)/1+1=13,每个 GPU 中有 13×13×128 个卷积核,2 个 GPU 卷积后生成 13×13×256 的像素层。
(2)ReLU
卷积后的像素层经过 ReLU 单元处理,生成激活像素层,尺寸仍为 2 组 13×13×128 像素层,由两个 GPU 分别处理。
(3)池化(重叠最大池化)
2 组 13×13×128 像素层分别在 2 个不同 GPU 中进行池化运算处理,池化运算的尺寸为 3×3,步长为 2,池化后图像的尺寸为 (13-3)/2+1=6,即池化后像素的规模为两组 6×6×128 的像素层数据,共有 6×6×256 的像素层数据。
6、第六层(全连接层)
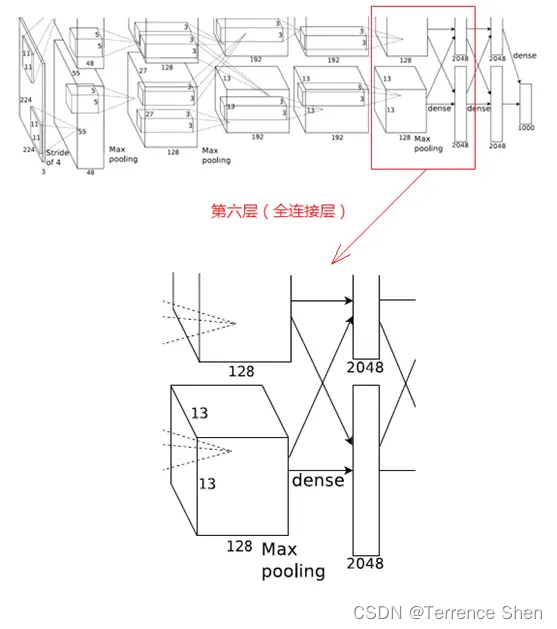
第六层的处理流程为:卷积(全连接)–>ReLU–>Dropout

(1)卷积(全连接)
第六层输入数据是第五层的输出,尺寸为 6×6×256。本层共有 4096 个卷积核,每个卷积核的尺寸为 6×6×256,由于卷积核的尺寸刚好与待处理特征图(输入)的尺寸相同,即卷积核中的每个系数只与特征图(输入)尺寸的一个像素值相乘,一一对应,因此,该层被称为全连接层。由于卷积核与特征图的尺寸相同,卷积运算后只有一个值,因此,卷积后的像素层尺寸为 4096×1×1,即有 4096 个神经元。
(2)ReLU
这 4096 个运算结果通过 ReLU 激活函数生成 4096 个值。
(3)Dropout
然后再通过 Dropout 运算,输出 4096 个结果值。
7、第七层(全连接层)
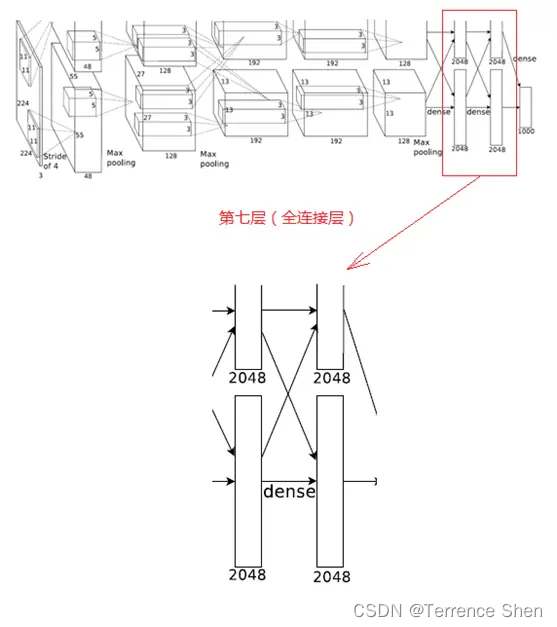
第七层的处理流程为:全连接 -->ReLU–>Dropout
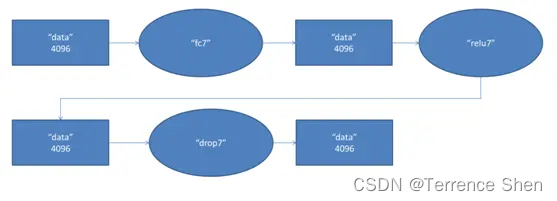
第六层输出的 4096 个数据与第七层的 4096 个神经元进行全连接,然后经 ReLU 进行处理后生成 4096 个数据,再经过 Dropout 处理后输出 4096 个数据。
8、第八层(全连接层)
第七层输出的 4096 个数据与第八层的 1000 个神经元进行全连接,经过训练后输出 1000 个 float 型的值,这就是预测结果。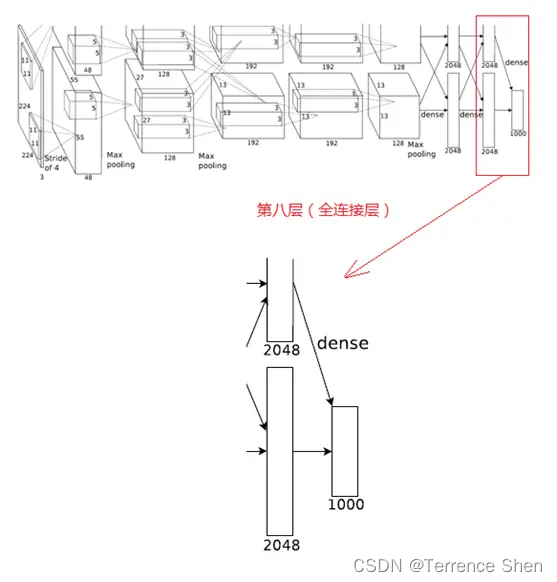
一张简图: