概述
GNSS的全称为全球导航卫星系统(Global Navigation Satellite System),其含义泛指所有卫星导航系统,包括全球的、区域的和增强的卫星导航系统,如美国的GPS、俄罗斯的GLONASS、欧洲的Galileo、中国的北斗卫星导航系统,以及相关的增强系统。GNSS在室外的机器人定位、自动驾驶等领域都有广泛的应用。这里我们主要介绍一下GNSS与相机、IMU等传感器融合的两种建模方法。
大家都知道,基于相对定位或者递推方法的定位导航,例如惯性导航、视觉SLAM、VIO等系统,随着运行时间的增加会发生大的漂移。而GNSS定位属于绝对定位,它的位置与之前的位置没有关联,因而不存在漂移的影响。但是其定位精度非常有限,一般GPS定位精度在米级。有学者考虑VIO+GNSS的融合方案来实现两种方法的互补,既可以实现全局无漂移的定位,又可以在局部轨迹获得更高的精度。在这里我们介绍两种不同的GNSS建模方法。

第一种方法:直接观测
这种建模方法是最常用的方法,大多数工程实现和论文中VIO+GPS的方案就是用GNSS的直接观测建模。直接观测的意思是直接利用GNSS输出的位置信息,与局部定位算法(比如VO、VIO)输出的局部轨迹进行对齐。即构建如下两个观测方程:

第二种方法: 降级观测
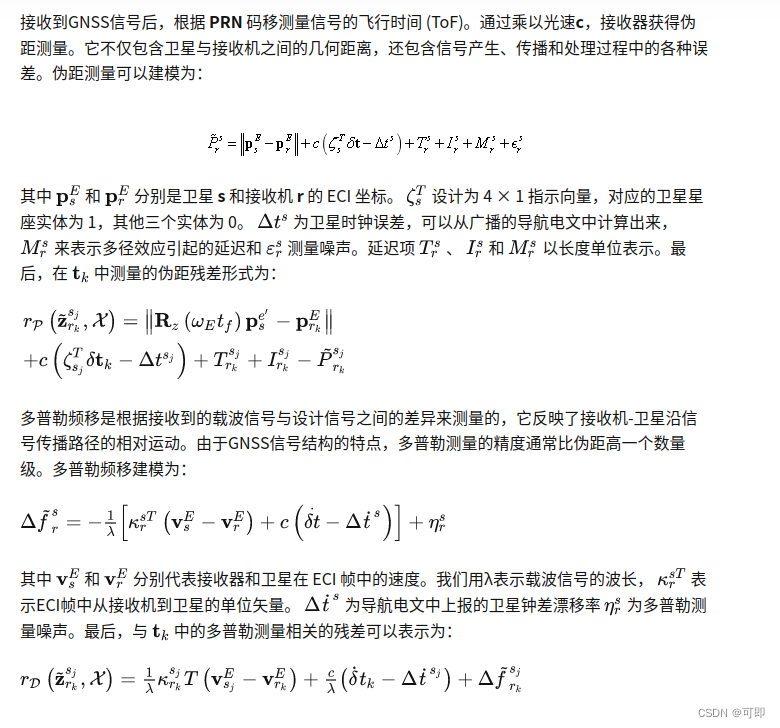
降级观测的意思使用GNSS的原始测量:伪距和多普勒频移。伪距的意思是GPS观测站到卫星的距离,由于尚未对因“卫星时钟与接收机时钟同步误差”的影响加以改正,在所测距离中包含着时钟误差因素在内,故称“伪距”。与上一种方法相比,这种建模方法与相机、IMU等传感器的融合更紧密。在跟踪卫星数量低于 4 的情况下,GPS位置输出不可靠的情况下,该方法仍然可以稳定输出。
两种方法效果对比:
我们来对比一下两种建模方式的在实践中的定位效果,两种方法都采用VIO+GPS的配置。其中直接观测的建模我们以VINS_Fusion[1]为例,降级观测的建模我们以GVINS[2]为例。两种方法都是香港科技大学的工作,并且是开源的.

 从结果可以看出,两种方法都很好地消除了VIO长时间运行的轨迹漂移。直接观测采用松耦合的方式加入GPS观测,而降级观测采用紧耦合的方式从传感器数据层面进行融合。相比来说,降级观测模型更复杂,考虑了更多的参数和约束(伪距约束和多普勒约束),因此能实现精度更高、更鲁棒的系统。在论文中5.9km的行驶距离中报道了4.5m的绝对轨迹误差,定位精度与RTK相当,但是比RTK更鲁棒,因为它能处理没有卫星信号不全时的情况。而直接观测的方法,模型比较简单,从更长期的运行(VIO的协方差超过了GPS协方差)来看,系统的定位误差会收敛到GPS的水平。
从结果可以看出,两种方法都很好地消除了VIO长时间运行的轨迹漂移。直接观测采用松耦合的方式加入GPS观测,而降级观测采用紧耦合的方式从传感器数据层面进行融合。相比来说,降级观测模型更复杂,考虑了更多的参数和约束(伪距约束和多普勒约束),因此能实现精度更高、更鲁棒的系统。在论文中5.9km的行驶距离中报道了4.5m的绝对轨迹误差,定位精度与RTK相当,但是比RTK更鲁棒,因为它能处理没有卫星信号不全时的情况。而直接观测的方法,模型比较简单,从更长期的运行(VIO的协方差超过了GPS协方差)来看,系统的定位误差会收敛到GPS的水平。
从优化算法的层面来讲,两种方法是松耦合和紧耦合的区别,直接观测从位姿图优化的角度出发,降级观测从传感器因子图优化的角度出发。都能获得全局一致估计。值得说明的是,两种都需要严格的时间对准。因为基于卫星的定位都对时间同步要求非常严格。