MoveIt安装
由于我这里是Ubuntu 20.04的,所以会安装noetic版本的软件包
sudo apt install ros-noetic-moveit
如果是Ubuntu 18.04,则运行
sudo apt install ros-melodic-moveit
此处安装需要一点时间。
安装完成后输入
moveit_version
有输出表示安装成功,我这里输出为
1.1.13
安装ccd
从https://github.com/danfis/libccd下载源码,解压缩后进入主文件夹下的src,编译
cd src
修改Makefile,修改内容如下
CFLAGS += -I. -fvisibility=hidden -fPIC
继续执行
make
sudo make install
安装fcl库
从https://github.com/flexible-collision-library/fcl下载源码,解压缩后进入主文件夹进行编译安装
mkdir build
cd build
cmake ..
make
sudo make install
创建机械臂模型
URDF建模原理
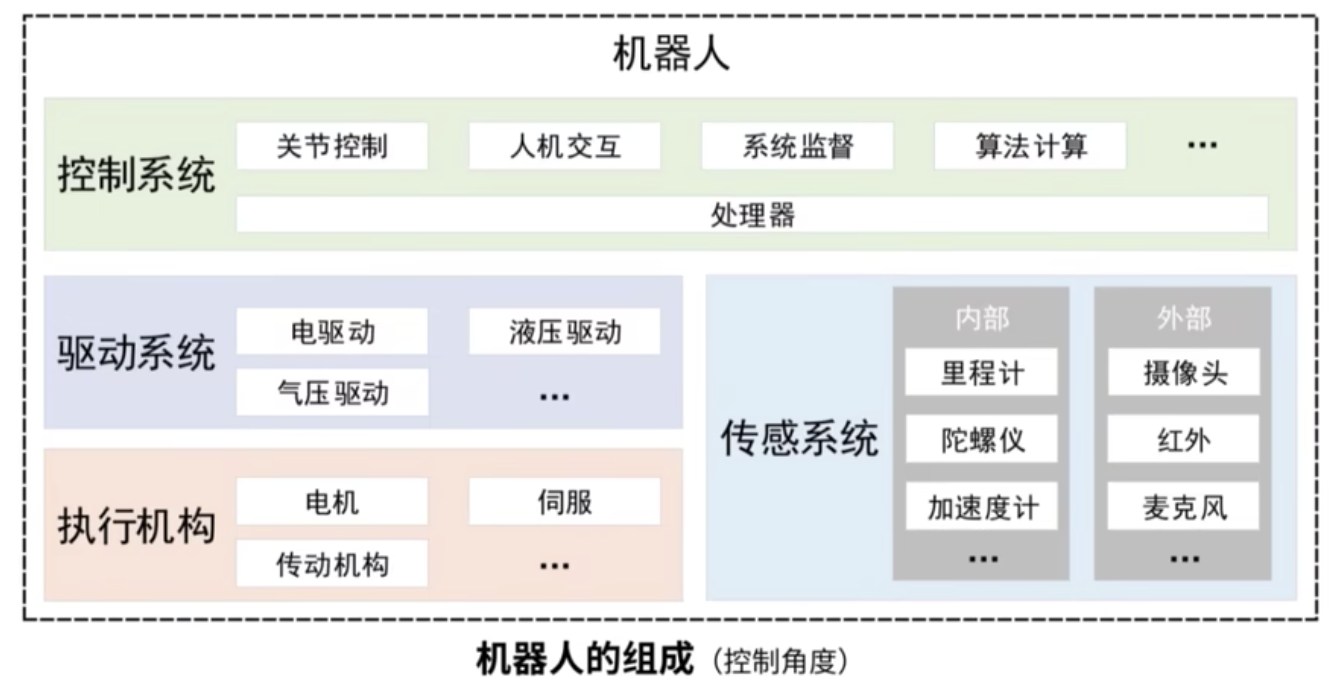
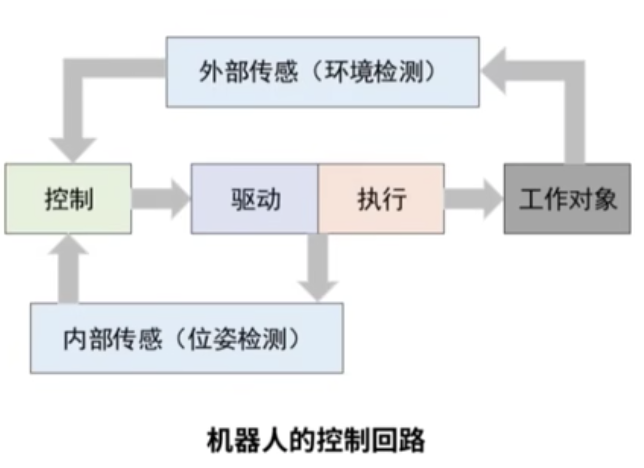
机器人主要分为控制系统、驱动系统、执行机构、传感系统。
- 控制系统:相当于人的大脑,实现任务及信息的处理,输出控制命令信号。
- 驱动系统:相当于人的肌肉和经络,负责驱动执行机构,将控制系统下达的命令转换成执行机构需要的信号。
- 执行机构:相当于人的手和脚,直接干活的机械装置。
- 传感系统:相当于人的感官和神经,完成信号的输入和反馈,包括内部传感系统(感知机器人内部状态,如姿态传感器,里程计)和外部传感系统(感知外部环境,如激光雷达)。
这里说的建模指的是对执行机构(机械装置)进行建模。
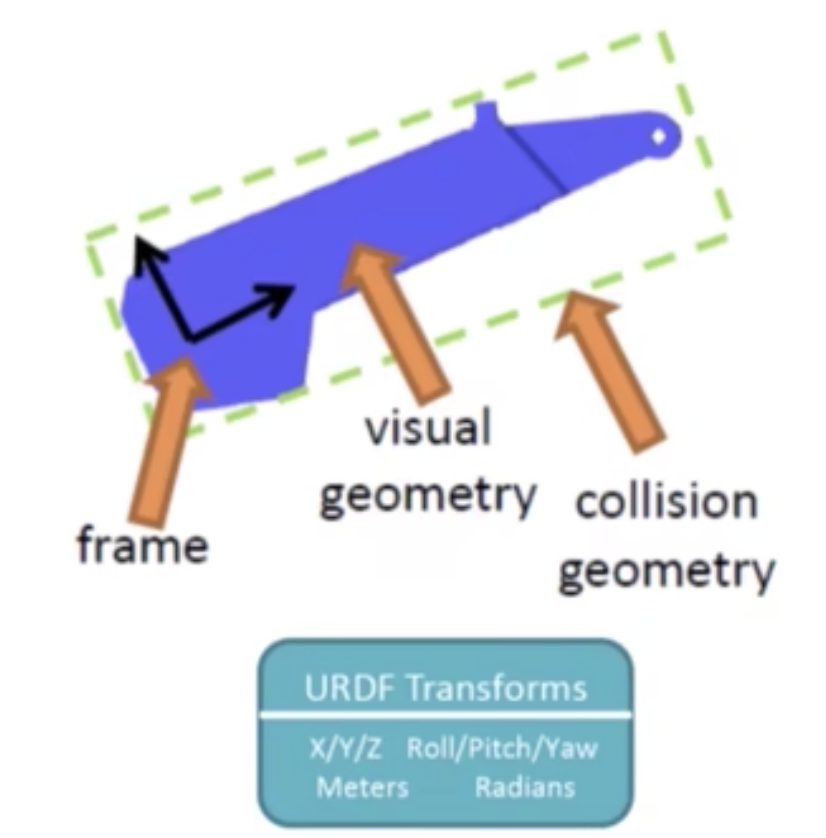
URDF:一种使用XML格式描述的机器人模型文件。

对上图的机械臂来讲,分为大臂、小臂以及中间的关节。无论是大臂、小臂,我们都称为刚体连杆(links),中间的关节称为joint。在模型文件中包含
- Links:坐标系与几何关系。
- Joints:Links之间的连接关系。
URDF不仅可以对机械臂进行建模,还可以对外接场景进行建模。比如上图中的桌子,它其实就是一个刚体部分,所以也是一个link。
<link>
- 描述机器人某个刚体部分的外观和物理属性;
- 描述连杆尺寸(size),颜色(color),形状(shape),惯性矩阵(inertial matrix),碰撞参数(collsion properties)等;
- 每个Link会成为一个坐标系
<link name="link_4">
<visual>
<geometry>
<mesh filename="link_4.stl" />
</geometry>
</visual>
<collision>
<geometry>
<cylinder length="0.5" radius="0.1" />
</geometry>
<origin xyz="0 0 -0.05" rpy="0 0 0" />
</collision>
</link>
MoveIt核心功能以及Rivz控制
在不同的命令行窗口执行
roscore
rosrun moveit_setup_assistant moveit_setup_assistant
会弹出一个窗口,上面有两个按钮——Create New MoveIt Configuration Package(创建一个新的包)、Edit Existing MoveIt Configuration Package(编辑已有的包)。
全国首款支持多环境开发的 IDE —— CEC-IDE 微软已将 Python 集成到 Excel,龟叔参与架构制定 中国程序员拒写赌博程序被拔 14 颗牙,全身损伤达 88% 朱雀仿宋 —— 首款开源仿宋字体 Podman Desktop 突破 50 万下载量 自动跳过开屏广告应用「李跳跳」无限期停止更新 System Initiative 宣布将其所有软件全部开源 Unity 引擎中国版“团结引擎”正式发布 Windows QQ 客户端存在远程代码执行漏洞 小米备案 mios.cn 网站域名
{{o.name}}
{{m.name}}