机器人工具坐标系标定就是确定工具坐标系相对于末端连杆坐标系的变换矩阵
标定步骤
控制机械臂移动工具从不同方位触碰空间中某个固定点,记录N组数据(
n
⩾
3
n \geqslant 3
n ⩾ 3
计算获得工具末端点相对机械臂末端点的位置变换;
标定步骤
完成位置标定;
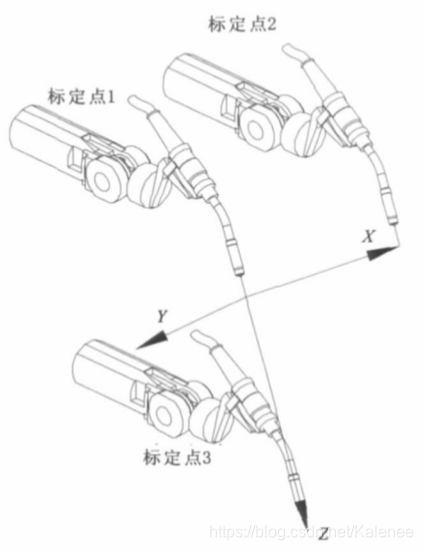
控制工具末端点分别沿x方向和z方向移动一定距离,工具末端点只在该方向上有移动,其它方向上无位移,同时固定初始姿态保持不变。实际操作上可以设置三个固定点(三个固定点满足上述要求,点2和点3相对点1只有一个方向上的移动),使工具末端点分别触碰这三个点然后记录下机械臂末端位姿;
计算获得工具坐标系相对机械臂末端坐标系的姿态变换;
末端连杆坐标系{E}到基坐标系{B}的位姿关系为:
(1)
E
B
T
=
[
E
B
R
B
p
E
0
0
0
0
1
]
=
[
E
B
n
E
B
o
E
B
a
B
p
E
0
0
0
0
1
]
_{E}^{B}\textrm{T} = \begin{bmatrix} _{E}^{B}\textrm{R} & _{}^{B}\textrm{p}_{E_0}\\ 0\ 0\ 0 & 1 \end{bmatrix} = \begin{bmatrix} _{E}^{B}\textrm{n}&_{E}^{B}\textrm{o}&_{E}^{B}\textrm{a} & _{}^{B}\textrm{p}_{E_0}\\ 0& 0& 0 & 1 \end{bmatrix} \tag{1}
E B T = [ E B R 0 0 0 B p E 0 1 ] = [ E B n 0 E B o 0 E B a 0 B p E 0 1 ] ( 1 )
E
B
T
_{E}^{B}\textrm{T}
E B T
E
B
R
_{E}^{B}\textrm{R}
E B R
B
p
E
0
_{}^{B}\textrm{p}_{E_0}
B p E 0
工具坐标系{T}到基坐标系{B}的位姿关系为:
(2)
E
B
T
⋅
T
E
T
=
T
B
T
_{E}^{B}\textrm{T} \cdot _{T}^{E}\textrm{T} = _{T}^{B}\textrm{T} \tag{2}
E B T ⋅ T E T = T B T ( 2 )
在TCP位置标定过程中,第i个标定点的末端连杆坐标系到基坐标系的变换矩阵
E
B
T
_{E}^{B}\textrm{T}
E B T
E
B
T
i
⋅
T
E
T
=
T
B
T
i
_{E}^{B}\textrm{T}_{i} \cdot _{T}^{E}\textrm{T} = _{T}^{B}\textrm{T}_{i}
E B T i ⋅ T E T = T B T i
(3)
[
E
B
R
i
B
p
i
E
o
0
0
0
1
]
⋅
[
T
E
R
B
p
t
c
p
0
0
0
1
]
=
[
E
B
R
i
B
p
t
c
p
0
0
0
1
]
\begin{bmatrix} _{E}^{B}\textrm{R}_{i} & _{}^{B}\textrm{p}_{{iE}_o}\\ 0\ 0\ 0 & 1 \end{bmatrix} \cdot \begin{bmatrix} _{T}^{E}\textrm{R} & _{}^{B}\textrm{p}_{tcp}\\ 0\ 0\ 0 & 1 \end{bmatrix}= \begin{bmatrix} _{E}^{B}\textrm{R}_{i} & _{}^{B}\textrm{p}_{tcp}\\ 0\ 0\ 0 & 1 \end{bmatrix} \tag{3}
[ E B R i 0 0 0 B p i E o 1 ] ⋅ [ T E R 0 0 0 B p t c p 1 ] = [ E B R i 0 0 0 B p t c p 1 ] ( 3 )
E
B
R
i
⋅
B
p
t
c
p
+
B
p
i
E
o
=
B
p
t
c
p
_{E}^{B}\textrm{R}_{i} \cdot _{}^{B}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{{iE}_o} = _{}^{B}\textrm{p}_{tcp}
E B R i ⋅ B p t c p + B p i E o = B p t c p {}^{B}\textrm{p} {tcp}$为确定值。所以,对于所有标定点有如下关系:
E
B
R
1
⋅
B
p
t
c
p
+
B
p
i
E
0
=
E
B
R
2
⋅
B
p
t
c
p
+
B
p
i
E
o
=
⋯
=
E
B
R
n
⋅
B
p
t
c
p
+
B
p
i
E
o
\begin{aligned} _{E}^{B}\textrm{R}_{1} \cdot _{}^{B}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{{iE}_0}&= _{E}^{B}\textrm{R}_{2} \cdot _{}^{B}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{{iE}_o}\\ &=\cdots\\ &= _{E}^{B}\textrm{R}_{n} \cdot _{}^{B}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{{iE}_o} \end{aligned}
E B R 1 ⋅ B p t c p + B p i E 0 = E B R 2 ⋅ B p t c p + B p i E o = ⋯ = E B R n ⋅ B p t c p + B p i E o
写成矩阵形式:
(4)
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
⋮
E
B
R
n
−
1
−
E
B
R
n
]
⋅
E
p
t
c
p
=
[
B
P
2
E
0
−
B
P
1
E
o
B
P
3
E
0
−
B
P
2
E
o
⋮
B
P
n
E
0
−
B
P
n
−
1
E
o
]
\begin{bmatrix} _{E}^{B}\textrm{R}_{1} - _{E}^{B}\textrm{R}_{2}\\ _{E}^{B}\textrm{R}_{2} - _{E}^{B}\textrm{R}_{3}\\ \vdots \\ _{E}^{B}\textrm{R}_{n-1} - _{E}^{B}\textrm{R}_{n} \end{bmatrix} \cdot _{}^{E}\textrm{p}_{tcp} =\begin{bmatrix} _{}^{B}\textrm{P}_{{2}E_0} - _{}^{B}\textrm{P}_{{1}E_o}\\ _{}^{B}\textrm{P}_{{3}E_0} - _{}^{B}\textrm{P}_{{2}E_o}\\ \vdots \\ _{}^{B}\textrm{P}_{{n}E_0} - _{}^{B}\textrm{P}_{{n-1}E_o}\\ \end{bmatrix} \tag{4}
⎣ ⎢ ⎢ ⎢ ⎡ E B R 1 − E B R 2 E B R 2 − E B R 3 ⋮ E B R n − 1 − E B R n ⎦ ⎥ ⎥ ⎥ ⎤ ⋅ E p t c p = ⎣ ⎢ ⎢ ⎢ ⎡ B P 2 E 0 − B P 1 E o B P 3 E 0 − B P 2 E o ⋮ B P n E 0 − B P n − 1 E o ⎦ ⎥ ⎥ ⎥ ⎤ ( 4 )
上式的未知量
E
p
t
c
p
_{}^{E}\textrm{p}_{tcp}
E p t c p
3
(
n
−
1
)
3(n-1)
3 ( n − 1 )
3
(
n
−
1
)
×
3
3(n-1) \times 3
3 ( n − 1 ) × 3
当
n
⩾
3
n \geqslant 3
n ⩾ 3
E
p
t
c
p
=
A
+
⋅
[
B
P
2
E
o
−
B
P
1
E
o
B
P
3
E
o
−
B
P
2
E
o
⋮
B
P
n
E
o
−
B
P
n
−
1
E
o
]
_{}^{E}\textrm{p}_{tcp} =A^+ \cdot \begin{bmatrix} _{}^{B}\textrm{P}_{{2}E_o} - _{}^{B}\textrm{P}_{{1}E_o}\\ _{}^{B}\textrm{P}_{{3}E_o} - _{}^{B}\textrm{P}_{{2}E_o}\\ \vdots \\ _{}^{B}\textrm{P}_{{n}E_o} - _{}^{B}\textrm{P}_{{n-1}E_o}\\ \end{bmatrix}
E p t c p = A + ⋅ ⎣ ⎢ ⎢ ⎢ ⎡ B P 2 E o − B P 1 E o B P 3 E o − B P 2 E o ⋮ B P n E o − B P n − 1 E o ⎦ ⎥ ⎥ ⎥ ⎤
非奇异的"方阵 "才能叫"可逆矩阵 ",奇异的"方阵 "叫"不可逆矩阵 "。
现代应用中为了解决各种线性方程组(系数矩阵是非方阵 和方阵为奇异 ),将逆矩阵的概念推广到"不可逆方阵 "和"长方形矩阵 "上,从而产生了"广义逆矩阵 "的概念
若A为行满秩 ,则
A
+
=
A
H
(
A
A
H
)
−
1
A^+ = A^H(AA^H)^{-1}
A + = A H ( A A H ) − 1
若A为列满秩 ,则
A
+
=
(
A
H
A
)
−
1
A
H
A^+ = (A^{H}A)^{-1}A^H
A + = ( A H A ) − 1 A H
A
+
A^+
A +
A
+
=
(
A
H
A
)
−
1
A
H
A^+ = (A^{H}A)^{-1}A^H
A + = ( A H A ) − 1 A H
(5)
E
p
t
c
p
=
[
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
⋮
E
B
R
n
−
1
−
E
B
R
n
]
T
⋅
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
⋮
E
B
R
n
−
1
−
E
B
R
n
]
]
−
1
⋅
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
⋮
E
B
R
n
−
1
−
E
B
R
n
]
T
⋅
[
B
P
2
E
o
−
B
P
1
E
o
B
P
3
E
o
−
B
P
2
E
o
⋮
B
P
n
E
o
−
B
P
n
−
1
E
o
]
_{}^{E}\textrm{p}_{tcp}= \begin{bmatrix} \begin{bmatrix} _{E}^{B}\textrm{R}_{1} - _{E}^{B}\textrm{R}_{2}\\ _{E}^{B}\textrm{R}_{2} - _{E}^{B}\textrm{R}_{3}\\ \vdots \\ _{E}^{B}\textrm{R}_{n-1} - _{E}^{B}\textrm{R}_{n} \end{bmatrix}^{T} \cdot \begin{bmatrix} _{E}^{B}\textrm{R}_{1} - _{E}^{B}\textrm{R}_{2}\\ _{E}^{B}\textrm{R}_{2} - _{E}^{B}\textrm{R}_{3}\\ \vdots \\ _{E}^{B}\textrm{R}_{n-1} - _{E}^{B}\textrm{R}_{n} \end{bmatrix} \end{bmatrix}^{-1} \cdot \begin{bmatrix} _{E}^{B}\textrm{R}_{1} - _{E}^{B}\textrm{R}_{2}\\ _{E}^{B}\textrm{R}_{2} - _{E}^{B}\textrm{R}_{3}\\ \vdots \\ _{E}^{B}\textrm{R}_{n-1} - _{E}^{B}\textrm{R}_{n} \end{bmatrix}^{T} \cdot \begin{bmatrix} _{}^{B}\textrm{P}_{{2}E_o} - _{}^{B}\textrm{P}_{{1}E_o}\\ _{}^{B}\textrm{P}_{{3}E_o} - _{}^{B}\textrm{P}_{{2}E_o}\\ \vdots \\ _{}^{B}\textrm{P}_{{n}E_o} - _{}^{B}\textrm{P}_{{n-1}E_o}\\ \end{bmatrix} \tag{5}
E p t c p = ⎣ ⎢ ⎢ ⎢ ⎡ ⎣ ⎢ ⎢ ⎢ ⎡ E B R 1 − E B R 2 E B R 2 − E B R 3 ⋮ E B R n − 1 − E B R n ⎦ ⎥ ⎥ ⎥ ⎤ T ⋅ ⎣ ⎢ ⎢ ⎢ ⎡ E B R 1 − E B R 2 E B R 2 − E B R 3 ⋮ E B R n − 1 − E B R n ⎦ ⎥ ⎥ ⎥ ⎤ ⎦ ⎥ ⎥ ⎥ ⎤ − 1 ⋅ ⎣ ⎢ ⎢ ⎢ ⎡ E B R 1 − E B R 2 E B R 2 − E B R 3 ⋮ E B R n − 1 − E B R n ⎦ ⎥ ⎥ ⎥ ⎤ T ⋅ ⎣ ⎢ ⎢ ⎢ ⎡ B P 2 E o − B P 1 E o B P 3 E o − B P 2 E o ⋮ B P n E o − B P n − 1 E o ⎦ ⎥ ⎥ ⎥ ⎤ ( 5 )
根据求得的
E
p
t
c
p
_{}^{E}\textrm{p}_{tcp}
E p t c p
(6)
δ
=
∣
[
E
B
R
1
−
E
B
R
2
E
B
R
2
−
E
B
R
3
⋮
E
B
R
n
−
1
−
E
B
R
n
]
⋅
E
p
t
c
p
−
[
B
P
2
E
o
−
B
P
1
E
o
B
P
3
E
o
−
B
P
2
E
o
⋮
B
P
n
E
o
−
B
P
n
−
1
E
o
]
∣
=
(
∑
n
n
−
1
∣
(
B
E
R
i
−
B
E
R
i
+
1
)
⋅
E
P
t
c
p
−
B
P
(
i
+
1
)
E
o
+
B
P
i
E
o
∣
2
)
1
2
\begin{aligned} \delta &= \begin{vmatrix} \begin{bmatrix} _{E}^{B}\textrm{R}_{1} - _{E}^{B}\textrm{R}_{2}\\ _{E}^{B}\textrm{R}_{2} - _{E}^{B}\textrm{R}_{3}\\ \vdots \\ _{E}^{B}\textrm{R}_{n-1} - _{E}^{B}\textrm{R}_{n} \end{bmatrix} \cdot _{}^{E}\textrm{p}_{tcp} - \begin{bmatrix} _{}^{B}\textrm{P}_{{2}E_o} - _{}^{B}\textrm{P}_{{1}E_o}\\ _{}^{B}\textrm{P}_{{3}E_o} - _{}^{B}\textrm{P}_{{2}E_o}\\ \vdots \\ _{}^{B}\textrm{P}_{{n}E_o} - _{}^{B}\textrm{P}_{{n-1}E_o}\\ \end{bmatrix} \end{vmatrix}\\ &=(\sum_{n}^{n-1}|(_{B}^{E}\textrm{R}_{i}- _{B}^{E}\textrm{R}_{i+1}) \cdot _{}^{E}\textrm{P}_{tcp}-_{}^{B}\textrm{P}_{{(i+1)E}_o}+_{}^{B}\textrm{P}_{{iE}_o}|^{2})^{\frac{1}{2}} \end{aligned} \tag{6}
δ = ∣ ∣ ∣ ∣ ∣ ∣ ∣ ∣ ∣ ⎣ ⎢ ⎢ ⎢ ⎡ E B R 1 − E B R 2 E B R 2 − E B R 3 ⋮ E B R n − 1 − E B R n ⎦ ⎥ ⎥ ⎥ ⎤ ⋅ E p t c p − ⎣ ⎢ ⎢ ⎢ ⎡ B P 2 E o − B P 1 E o B P 3 E o − B P 2 E o ⋮ B P n E o − B P n − 1 E o ⎦ ⎥ ⎥ ⎥ ⎤ ∣ ∣ ∣ ∣ ∣ ∣ ∣ ∣ ∣ = ( n ∑ n − 1 ∣ ( B E R i − B E R i + 1 ) ⋅ E P t c p − B P ( i + 1 ) E o + B P i E o ∣ 2 ) 2 1 ( 6 )
已知TCF状态标定2个标定点的末端连杆坐标系到基坐标系的变换矩阵,可求得工具中心点相对于基坐标系的位置:
B
p
a
t
c
p
=
E
B
R
o
⋅
E
p
t
c
p
+
B
p
o
E
o
B
p
x
t
c
p
=
E
B
R
x
⋅
E
p
t
c
p
+
B
p
x
E
o
_{}^{B}\textrm{p}_{atcp}= _{E}^{B}\textrm{R}_{o} \cdot _{}^{E}\textrm{p}_{tcp} +_{}^{B}\textrm{p}_{oEo}\\ _{}^{B}\textrm{p}_{xtcp}= _{E}^{B}\textrm{R}_{x} \cdot _{}^{E}\textrm{p}_{tcp} +_{}^{B}\textrm{p}_{xEo}
B p a t c p = E B R o ⋅ E p t c p + B p o E o B p x t c p = E B R x ⋅ E p t c p + B p x E o
B
p
z
t
c
p
=
E
B
R
z
⋅
E
p
t
c
p
+
B
p
z
E
o
_{}^{B}\textrm{p}_{ztcp}= _{E}^{B}\textrm{R}_{z} \cdot _{}^{E}\textrm{p}_{tcp} +_{}^{B}\textrm{p}_{zEo}
B p z t c p = E B R z ⋅ E p t c p + B p z E o
这两点所决定的向量为:
(7)
X
v
=
B
p
x
t
c
p
−
B
p
a
t
c
p
Z
v
=
B
p
z
t
c
p
−
B
p
a
t
c
p
_{}^{X}\textrm{v}_{} = _{}^{B}\textrm{p}_{xtcp} - _{}^{B}\textrm{p}_{atcp}\\ _{}^{Z}\textrm{v}_{} = _{}^{B}\textrm{p}_{ztcp} - _{}^{B}\textrm{p}_{atcp} \tag{7}
X v = B p x t c p − B p a t c p Z v = B p z t c p − B p a t c p ( 7 )
X
v
_{}^{X}\textrm{v}_{}
X v
(8)
X
v
=
△
x
⋅
E
B
R
o
⋅
T
E
n
_{}^{X}\textrm{v}_{} = \triangle x \cdot _{E}^{B}\textrm{R}_{o} \cdot _{T}^{E}\textrm{n}_{} \tag{8}
X v = △ x ⋅ E B R o ⋅ T E n ( 8 )
(9)
T
E
n
=
E
B
R
o
−
1
⋅
(
E
B
R
x
⋅
E
p
t
c
p
−
E
B
R
o
⋅
E
p
t
c
p
+
B
p
x
E
o
−
B
p
o
E
o
)
∣
E
B
R
x
⋅
E
p
t
c
p
−
E
B
R
o
⋅
E
p
t
c
p
+
B
p
x
E
o
−
B
p
o
E
o
∣
_{T}^{E}\textrm{n}_{} = \frac{_{E}^{B}\textrm{R}_{o}^{-1} \cdot (_{E}^{B}\textrm{R}_{x} \cdot _{}^{E}\textrm{p}_{tcp} - _{E}^{B}\textrm{R}_{o} \cdot _{}^{E}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{xEo} - _{}^{B}\textrm{p}_{oEo})}{|_{E}^{B}\textrm{R}_{x} \cdot _{}^{E}\textrm{p}_{tcp} - _{E}^{B}\textrm{R}_{o} \cdot _{}^{E}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{xEo} - _{}^{B}\textrm{p}_{oEo}|} \tag{9}
T E n = ∣ E B R x ⋅ E p t c p − E B R o ⋅ E p t c p + B p x E o − B p o E o ∣ E B R o − 1 ⋅ ( E B R x ⋅ E p t c p − E B R o ⋅ E p t c p + B p x E o − B p o E o ) ( 9 )
Z
v
_{}^{Z}\textrm{v}_{}
Z v
(10)
T
E
a
=
E
B
R
o
−
1
⋅
(
E
B
R
z
⋅
E
p
t
c
p
−
E
B
R
o
⋅
E
p
t
c
p
+
B
p
z
E
o
−
B
p
o
E
o
)
∣
E
B
R
z
⋅
E
p
t
c
p
−
E
B
R
o
⋅
E
p
t
c
p
+
B
p
z
E
o
−
B
p
o
E
o
∣
_{T}^{E}\textrm{a}_{} = \frac{_{E}^{B}\textrm{R}_{o}^{-1} \cdot (_{E}^{B}\textrm{R}_{z} \cdot _{}^{E}\textrm{p}_{tcp} - _{E}^{B}\textrm{R}_{o} \cdot _{}^{E}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{zEo} - _{}^{B}\textrm{p}_{oEo})}{|_{E}^{B}\textrm{R}_{z} \cdot _{}^{E}\textrm{p}_{tcp} - _{E}^{B}\textrm{R}_{o} \cdot _{}^{E}\textrm{p}_{tcp} + _{}^{B}\textrm{p}_{zEo} - _{}^{B}\textrm{p}_{oEo}|} \tag{10}
T E a = ∣ E B R z ⋅ E p t c p − E B R o ⋅ E p t c p + B p z E o − B p o E o ∣ E B R o − 1 ⋅ ( E B R z ⋅ E p t c p − E B R o ⋅ E p t c p + B p z E o − B p o E o ) ( 1 0 )
工具坐标系{T}的Y轴相对于末端连杆坐标系{E}的方向余弦为:
(11)
T
E
o
=
T
E
a
×
T
E
n
_{T}^{E}\textrm{o} = _{T}^{E}\textrm{a}\times_{T}^{E}\textrm{n} \tag{11}
T E o = T E a × T E n ( 1 1 )
(12)
T
E
a
=
T
E
n
×
T
E
o
_{T}^{E}\textrm{a} = _{T}^{E}\textrm{n}\times_{T}^{E}\textrm{o} \tag{12}
T E a = T E n × T E o ( 1 2 )
import numpy as np
import pandas as pd
import math
from scipy. spatial. transform import Rotation as R
class tool_cal ( ) :
def __init__ ( self) :
"""
load data from csv
tool_points(0~5) : use robot effectors to touch the same points in the world
and record the pos
tool_poses_tran(0~3):count tanslation
tool_poses_rot(3~5):count rotation
"""
with open ( "tool_data.csv" ) as file :
tool_poses = pd. read_csv( file , header = None )
tool_poses = np. array( tool_poses)
self. tran_tran= [ ]
self. tran_rotm= [ ]
tool_poses_tran = tool_poses[ 0 : 4 , : ]
for pose in tool_poses_tran:
self. tran_tran. append( np. array( [ [ pose[ 0 ] ] , [ pose[ 1 ] ] , [ pose[ 2 ] ] ] ) )
r = R. from_euler( 'xyz' , np. array( [ pose[ 3 ] , pose[ 4 ] , pose[ 5 ] ] ) , degrees= True )
self. tran_rotm. append( r. as_dcm( ) )
tool_tran= self. cal_tran( )
self. rot_tran= [ ]
self. rot_rotm= [ ]
tool_poses_rot = tool_poses[ 3 : 6 , : ]
for pose in tool_poses_rot:
self. rot_tran. append( np. array( [ [ pose[ 0 ] ] , [ pose[ 1 ] ] , [ pose[ 2 ] ] ] ) )
r = R. from_euler( 'xyz' , np. array( [ pose[ 3 ] , pose[ 4 ] , pose[ 5 ] ] ) , degrees= True )
self. rot_rotm. append( r. as_dcm( ) )
tool_rot= self. cal_rotm( tool_tran)
tool_T = np. array( np. zeros( ( 4 , 4 ) ) )
tool_T[ 0 : 3 , 0 : 3 ] = tool_rot
tool_T[ 0 : 3 , 3 : ] = tool_tran
tool_T[ 3 : , : ] = [ 0 , 0 , 0 , 1 ]
print tool_T
def cal_tran ( self) :
tran_data= [ ]
rotm_data= [ ]
for i in range ( len ( self. tran_tran) - 1 ) :
tran_data. append( self. tran_tran[ i+ 1 ] - self. tran_tran[ i] )
rotm_data. append( self. tran_rotm[ i] - self. tran_rotm[ i+ 1 ] )
L = np. array( np. zeros( ( 3 , 3 ) ) )
R = np. array( np. zeros( ( 3 , 1 ) ) )
for i in range ( len ( tran_data) ) :
L = L + np. dot( rotm_data[ i] , rotm_data[ i] )
R = R + np. dot( rotm_data[ i] , tran_data[ i] )
return np. linalg. inv( L) . dot( R)
def cal_rotm ( self, tran) :
P_otcp_To_B = np. dot( self. rot_rotm[ 0 ] , tran) + self. rot_tran[ 0 ]
P_xtcp_To_B = np. dot( self. rot_rotm[ 1 ] , tran) + self. rot_tran[ 1 ]
vector_X = P_xtcp_To_B - P_otcp_To_B
dire_vec_x_o = np. linalg. inv( self. rot_rotm[ 0 ] ) . dot( vector_X) / np. linalg. norm( vector_X)
P_ztcp_To_B = np. dot( self. rot_rotm[ 2 ] , tran) + self. rot_tran[ 2 ]
vector_Z = P_ztcp_To_B - P_otcp_To_B
dire_vec_z_o = np. linalg. inv( self. rot_rotm[ 0 ] ) . dot( vector_Z) / np. linalg. norm( vector_Z)
dire_vec_y_o = np. cross( dire_vec_z_o. T, dire_vec_x_o. T)
dire_vec_z_o = np. cross( dire_vec_x_o. T, dire_vec_y_o)
tool_rot = np. array( np. zeros( ( 3 , 3 ) ) )
tool_rot[ : , 0 ] = dire_vec_x_o. T
tool_rot[ : , 1 ] = dire_vec_y_o
tool_rot[ : , 2 ] = dire_vec_z_o
return tool_rot
if __name__ == "__main__" :
tool_cal( )
机器人工具坐标系TCP标定 四点法原理 与 matlab实现
机器人工具坐标系标定算法研究
广义逆矩阵A+