本次比赛为DFRobot行业AI开发者大赛,我们参加比赛的作品是数据驱动式的智能抓握系统。用到的硬件有机械臂,数据手套,nano开发板,LattePanda单板计算机以及intel神经计算棒2代。首先是最为基础的机械臂的拼装,但也是非常累的一项,我们选择的是3D打印技术,而打印的材料是尼龙,因为尼龙具有很高的刚性和柔韧性。当打印的产品比较薄时,您的部件将是柔性的,而当打印较厚的物体时,部件将是刚性的。这非常适合生产具有刚性部件和柔性接头的活动铰链等部件。尼龙材料3D打印可用于制作移动和互锁部件,并且使得能够更快地生产高度复杂的物体。而机械臂正是因为这些特点才会选择用尼龙打印。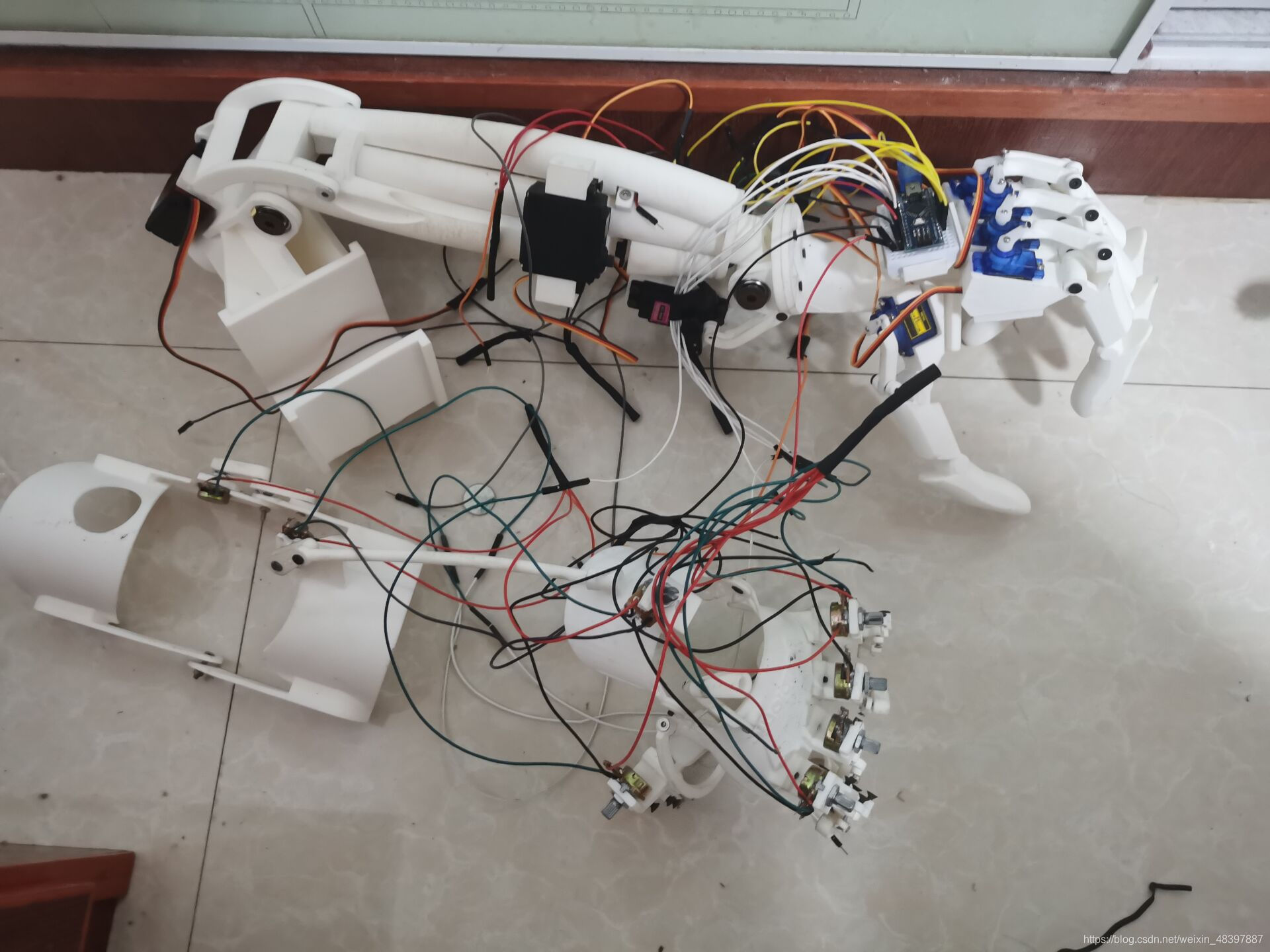
但当我开始组装的时候会发现,打印出来的机械臂,有一些孔它的大小是与图纸不匹配的,这是因为有一些部位,由于太薄,孔眼由于热胀冷缩,导致与图纸参数不匹配。所以我们可以在图纸上修改孔眼参数,当打印小零件时,孔眼大小加1mm,当打印大零件时,孔眼缩小1mm。这样,做出来的机械臂就能比较容易拼装起来。
实际在拼装的过程中,我们需要一些工具,电烙铁,万能表,丝攻。
下面,我来一一解释各个工具的作用,杜邦线和电位器相连,但由于杜邦线母口与电位器接头并不匹配,很容易脱落,这时候我们就需要用到电烙铁把杜邦线焊在电位器上。然后由于机械臂所连接的线很多,我们在全部连完之后,再去检测线路是否存在短路,这是一件非常麻烦的事,所以建议大家每弄完5条线路,用万能表进行一次检查,看是否存在短路。丝攻的作用便是把孔眼太小的,用它来把孔眼钻大,十分快捷方便。