1.分析法
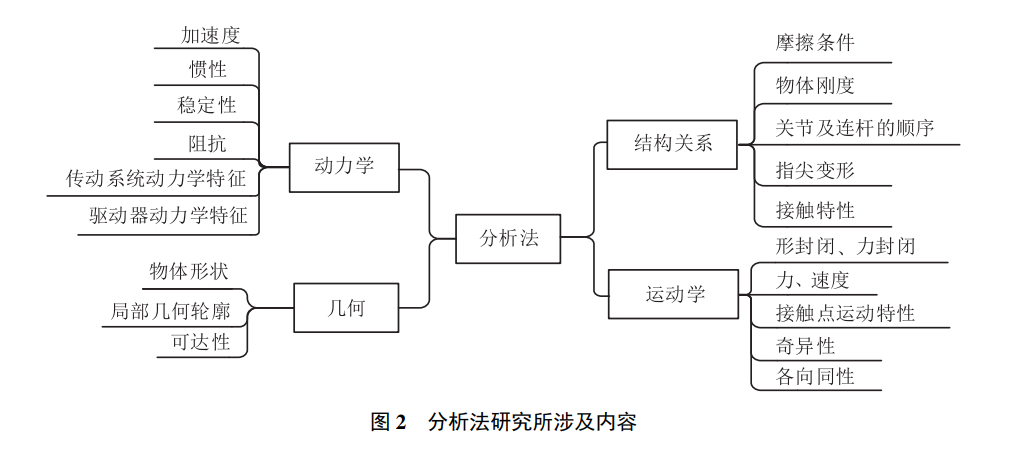 图 1 为分析法在进行抓取检测时所采用的 一般策略[3]
图 1 为分析法在进行抓取检测时所采用的 一般策略[3]
[3]Sahbani A, El-Khoury S, Bidaud P. An overview of 3D object grasp synthesis algorithms[J]. Robotics and Autonomous Systems, 2012, 60(3): 326-336.
首先,基于环境限制和机械手与物体模 型进行抓取检测,抓取检测是指找到满足与抓取任 务相关的一组候选抓取位姿的过程;然后,基于一定的选择标准和任务导向对场景输出的一组抓取位姿 进行选择,输出最佳抓取位姿;最后,传递给机器人执 行抓取. 实际应用时不一定包含图1中介绍的所有元 素. 图2就分析法所涉及的动力学、运动学、几何、结 构关系进行了详细的展开说明. 在阅读文献的过程 中发现,因为计算困难,当下应用的分析法多数没有 考虑到任务约束,实际情况大多是基于任务导向的; 分析法还有一个主要缺点,它要求对象参数是已知 的,因此分析法不适合在非结构环境下广泛使用.

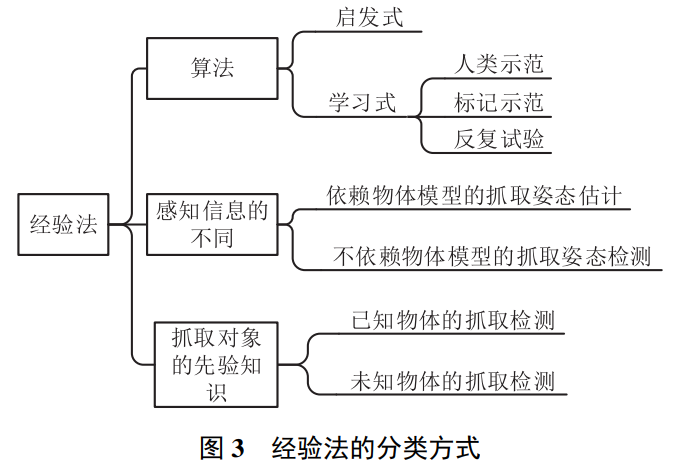
2.经验法
已知物体抓取流程:
已知物体抓取参考:Bohg J, Morales A, Asfour T, et al. Data-driven grasp synthesis— A survey[J]. IEEE Transactions on Robotics, 2014, 30(2): 289-309.
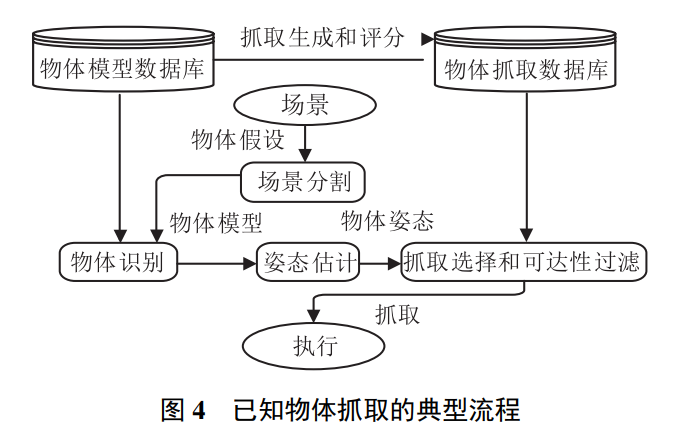
在离线阶段,对物体模型数据库的每个物体进行处理,生成候选抓取位姿,基于一定的选择标准进行评分排序,将抓取位姿存入抓取经验数据库,与物体模型数据库进行一一对应,以便检索
在在线阶段,将场景进行分割,识别出物体,找 到物体模型数据库中的物体与之对应,然后进行物体 姿态估计,根据位姿检索找到抓取经验数据库中的抓 取位姿,最后进行抓取选择和可达性过滤,执行抓取.
基于感知方法对未知物体抓取检测的流程:
对于未知对象,该方 法基于启发式将感知数据中的结构与候选抓取姿态 直接链接起来,根据使用数据特征的不同将这类方法 分为两种:一是提取分割后的点云或图片数据中的 二维或三维特征,基于启发式进行抓取规划[26-29];二 是根据已经分割好的点云直接拟合或估计基本几何 形状,进而根据该几何形状进行抓取规划[30-31] .

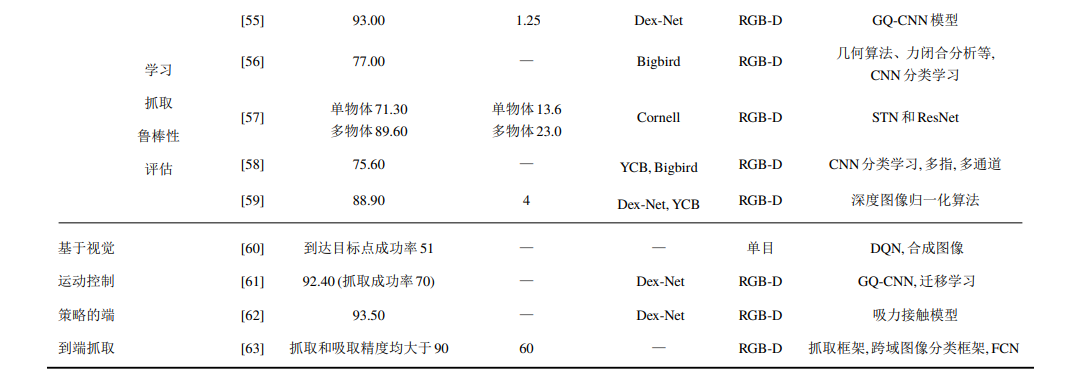
基于学习方法进行抓取的分类:
使用学习的方法检测抓取可分为两大类,如图6 所示:一是基于抓取检测的抓取方法(需要一个单独 抓取规划控制系统),通过抓取检测方法生成抓取位 姿,再使用单独的规划控制系统基于轨迹规划生成轨 迹,实现完整的抓取;二是基于视觉运动控制策略的 端到端抓取方法,实现从图像直接到抓取动作的映 射. 其中,第1类按照学习内容的不同又包含两种方法,一种是学习抓取表示的结构化输出,例如抓取框 等;另一种是学习抓取鲁棒性评估[2] . 表1列出了基 于学习的抓取检测方法的分类以及相关文献的检测 准确率、速度等结果,并展示了文献所采用的数据集 和算法,下文将紧紧围绕表1进行详细说明.