机器人抓取系列——姿态估计
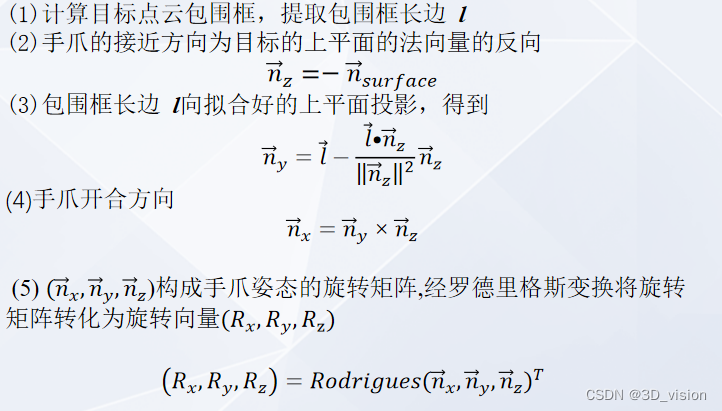 这样物体的6D姿态信息就可以得到了。
这样物体的6D姿态信息就可以得到了。猜你喜欢
转载自blog.csdn.net/toCVer/article/details/125292358
今日推荐
周排行