前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础。
一、创建硬件描述包
roscreat-pkg smartcar_description urdf
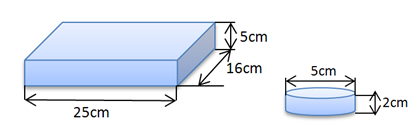
二、智能车尺寸数据
因为建立的是一个非常简单的机器人,所以我们尽量使用简单的元素:使用长方体代替车模,使用圆柱代替车轮,具体尺寸如下:
三、建立urdf文件
在smartcar_description文件夹下建立urdf文件夹,创建智能车的描述文件smartcar.urdf,描述代码如下:

四、建立launch命令文件
在smartcar_description文件夹下建立launch文件夹,创建智能车的描述文件 base.urdf.rviz.launch,描述代码如下:

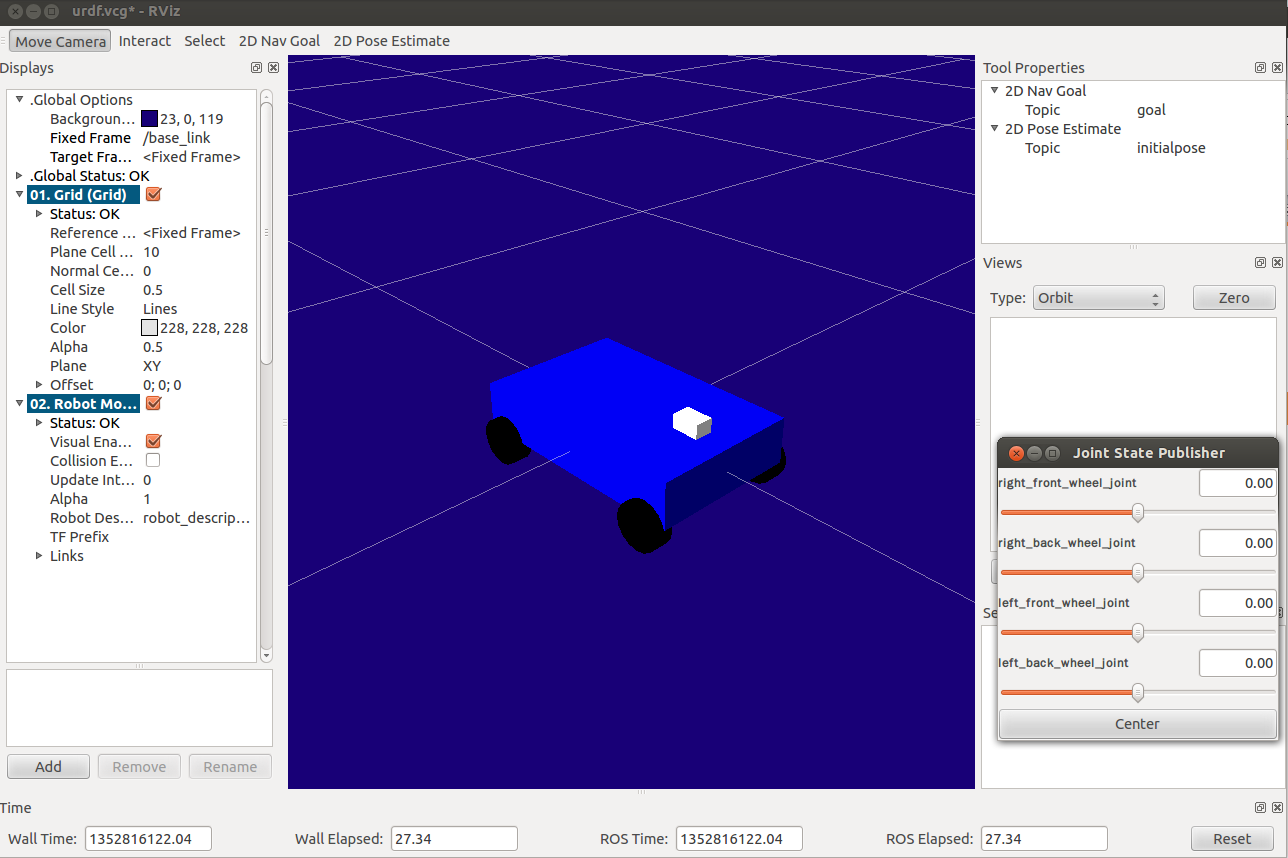
五、效果演示
在终端中输入显示命令:
roslaunch smartcar_description base.urdf.rviz.launch gui:=true
显示效果如下图所示,使用gui中的控制bar可以控制四个轮子单独旋转。
----------------------------------------------------------------
欢迎大家转载我的文章。
转载请注明:转自古-月
欢迎继续关注我的博客
个人分类: ROS
所属专栏: ROS探索总结