解释一:

解释二:
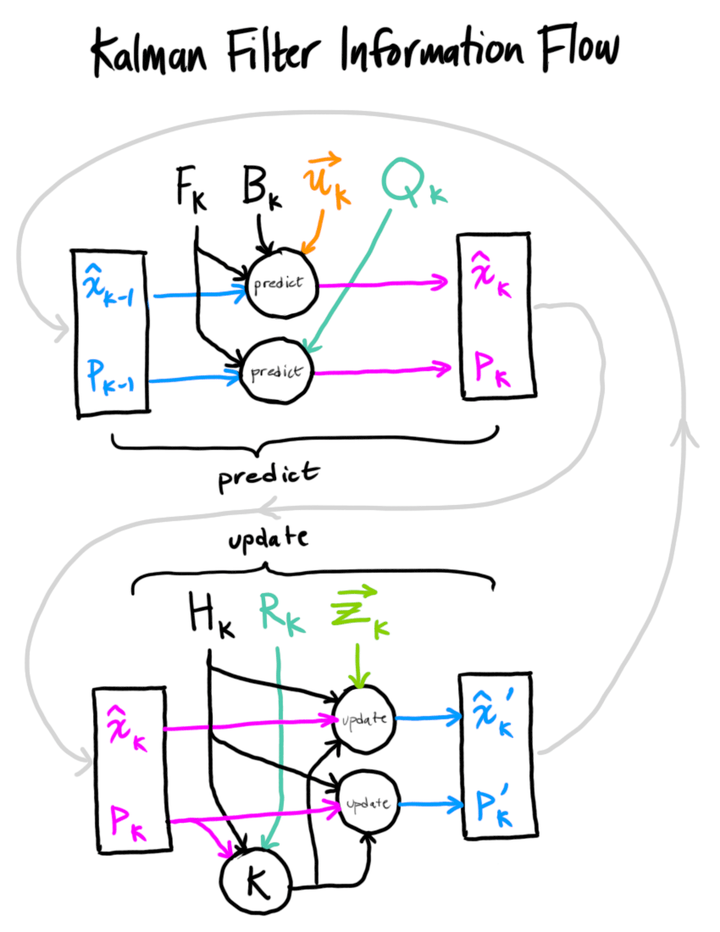
冗长一点的解释:
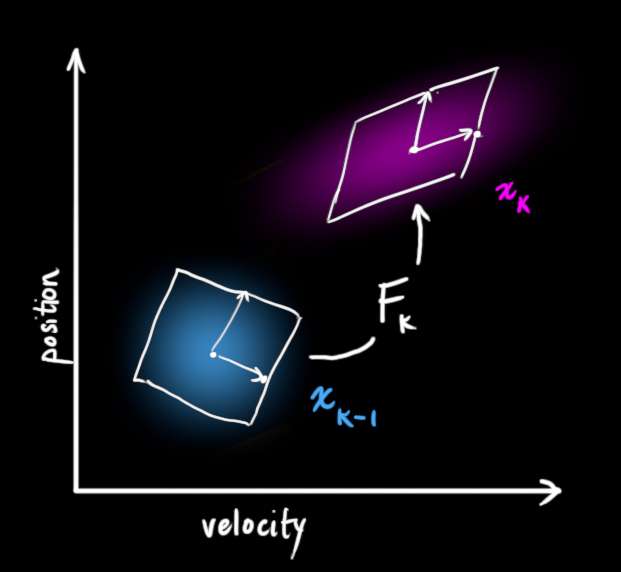
最简单的例子:物体的最简单基本的状态用它的位置和速度描述:
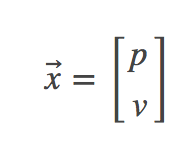
矩阵描述:
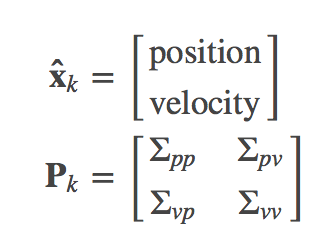
物体的状态是不确定的,假设速度和位置都是随机高斯分布的:

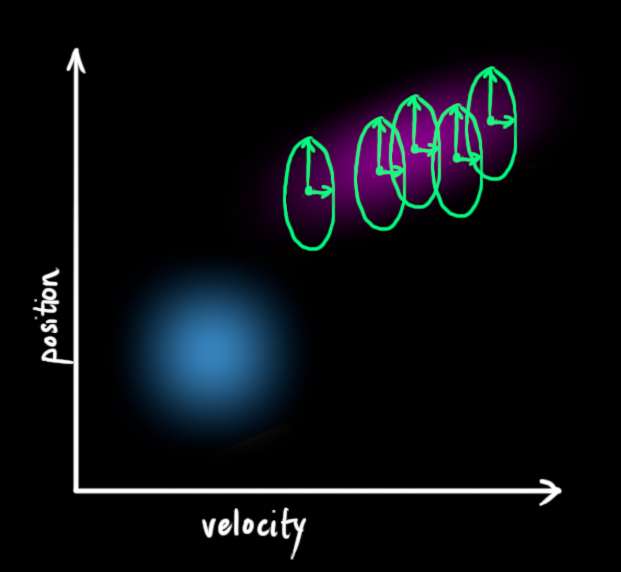
下图所示的速度和位置是不相关的:
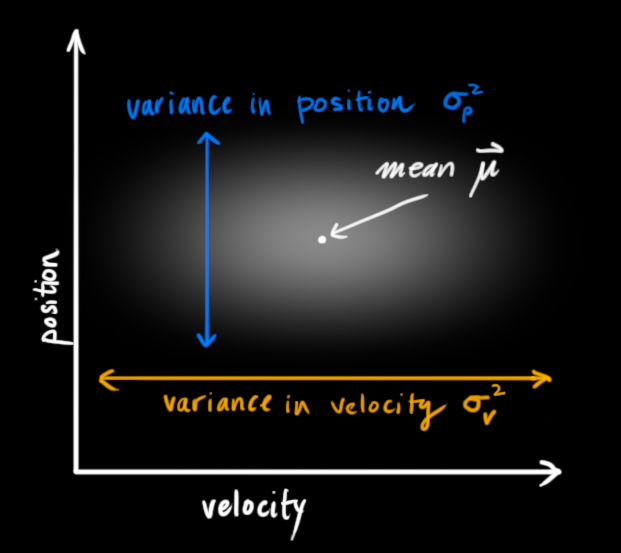
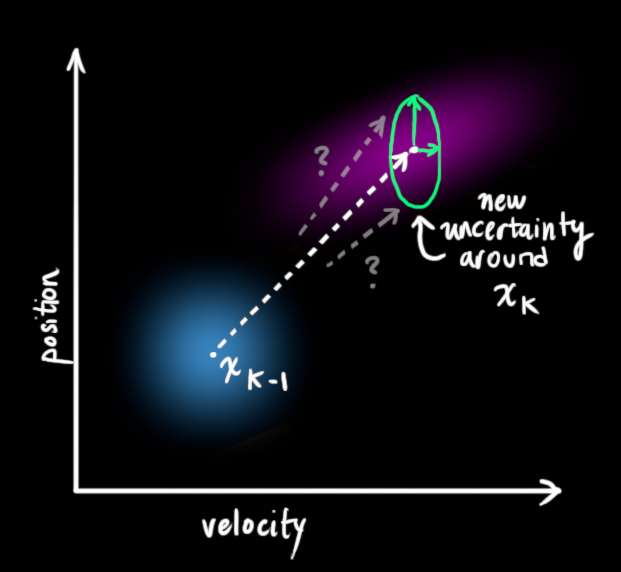
而实际测量中位置和速度是相关的。测量、追踪的目的就是根据已知状态以及相关性来压缩下一步的不确定性:



解释一:
解释二:
冗长一点的解释:
最简单的例子:物体的最简单基本的状态用它的位置和速度描述:
矩阵描述:
物体的状态是不确定的,假设速度和位置都是随机高斯分布的:
下图所示的速度和位置是不相关的:
而实际测量中位置和速度是相关的。测量、追踪的目的就是根据已知状态以及相关性来压缩下一步的不确定性: