核心要点
- 假设系统噪声和测量噪声符合高斯分布,协方差代表不确定度。
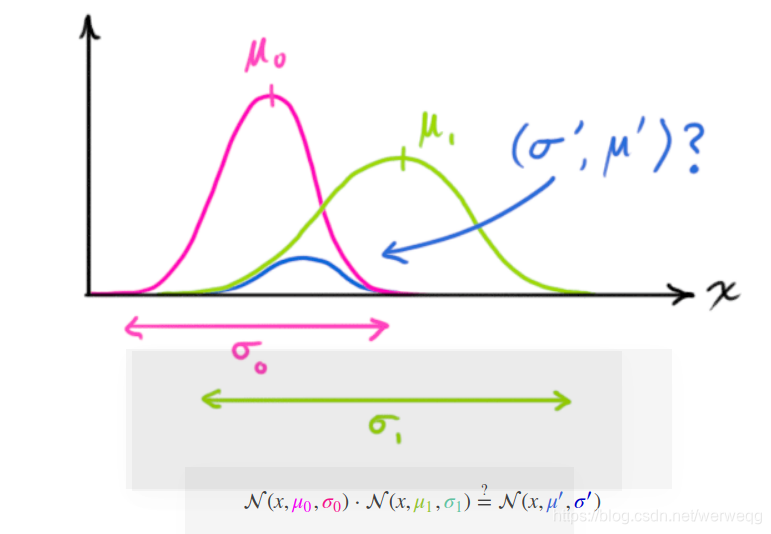
- 两个高斯分布的乘积依然是高斯分布,代表了两个分布的融合

- 所以kalman的核心思想即:综合通过前一时刻得到的预测信息(第一个高斯分布)和当期传感器测量的信息(第二个高斯分布),融合两个高斯分布得到当期系统状态的最佳估计。
(1) 根据上一时刻系统最佳估计和系统状态方程预测当前时刻的系统状态,得到一个预测值的高斯分布prediction;
(2) 根据传感器测量值及其噪声,得到测量值的高斯分布measurement
(3)N1与N2相乘,即得到新的高斯分布,即当前时刻的最佳估计,包括状态估计和不确定度估计。由于传感器测量值与系统状态的尺度不一定相同,所以引入H矩阵变换到同一尺度。
公式理解
分为两个阶段,第一个阶段,状态预测阶段,通过上一个时刻最佳预测和系统方程,得到当前时刻的估计,即得到第一个高斯分布。
阶段1.状态预测
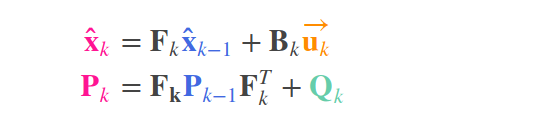
预测包括状态预测Xk,并更新预协方差Pk,即新的不确定度。
(1)状态预测Xk由状态更新矩阵Fk以及系统输入决定,即普通的状态空间方程。
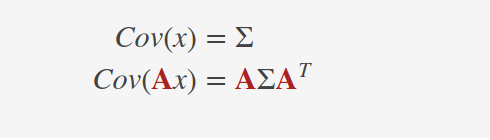
(2)预测新的协方差:将一个分布的所有点乘以矩阵A,则其协方差矩阵变换如下:
由上式子不难理解协方差更新方程的前半部分,而Qk代表外部的不确定性,例如直升机受到风的影响。
对状态更新公式的总结:新的最优估计是根据上一最优估计预测得到的,并加上已知外部控制量的修正。
而新的不确定性由上一不确定性预测得到,并加上外部环境的干扰
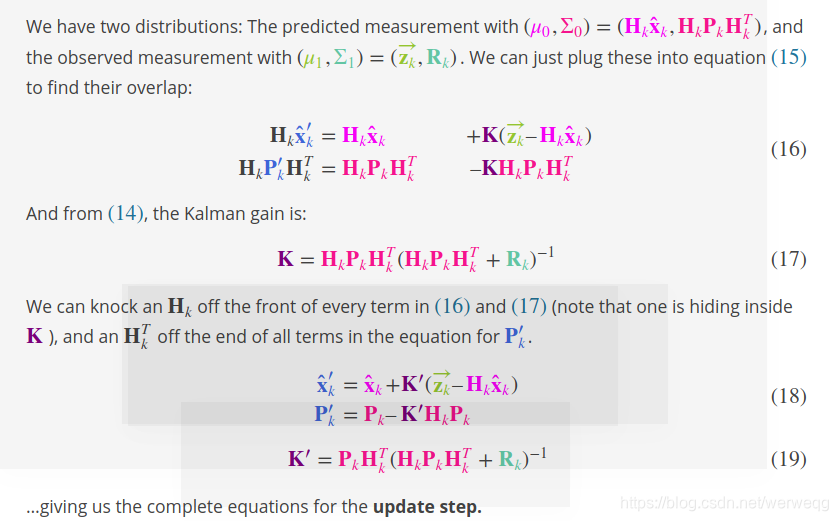
阶段2.通过测量值校正估计
(1)传感器的测量值符合分布N(zk,Rk),此外,传感器的尺度与系统状态不在同一个尺度,通过变换矩阵H变换到同一尺度

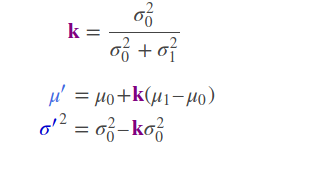
(2)将阶段1的预测分布与传感器的测量分布融合,两个高斯分布相乘即可。
新的分布如下,其中k即为卡尔曼增益的雏形。
最终形式
整体流程

参考文献
[1]Faragher R. Understanding the Basis of the Kalman Filter Via a Simple and Intuitive Derivation [Lecture Notes][J]. IEEE Signal Processing Magazine, 2012, 29(5):128-132.
[2]How a Kalman filter works, in pictures. http://www.bzarg.com/p/how-a-kalman-filter-works-in-pictures/