我们先给一个例子:
【hdu3507】给定n个正数与M(n∈[1,500000]),将它们分成若干段输出。输出一段的费用按下法计算:
求最小的
。
如果n小一些,这个题就应该属于DP入门题的那一类了吧:
令
为输出前
段的最小费用,则有:
时间复杂度为
,绝壁TLE!
自闭ing…TAT
自闭够了,接着想办法优化
观察这个DP式(假设j为一个决策点,即要更新
的点):
令
为前i项之和,则有:
假设还有另一决策点k:
它比j更优,则有:
打开括号,消去相同项:
整理一下:
令
。因为
都是正数,所以
单增。
若
,则:
等价于k比j优。
若
,则:
等价于k比j优。
综上,若编号小的更优,则
,反之,
。(这个结论很重要,请记一下)
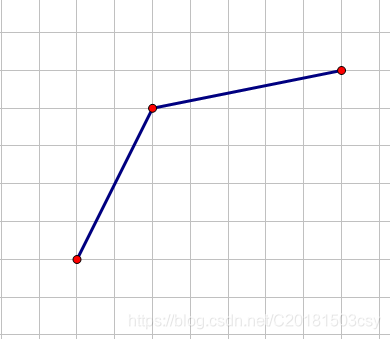
看见这个式子,我们自然地容易与斜率联系在一起(这点很重要!!!并且为了方便大家看出,已对柿子进行改写)。于是,我们把它搬到坐标系上:
由于忘了命名了, 规定由下往上依次为
,
,
。
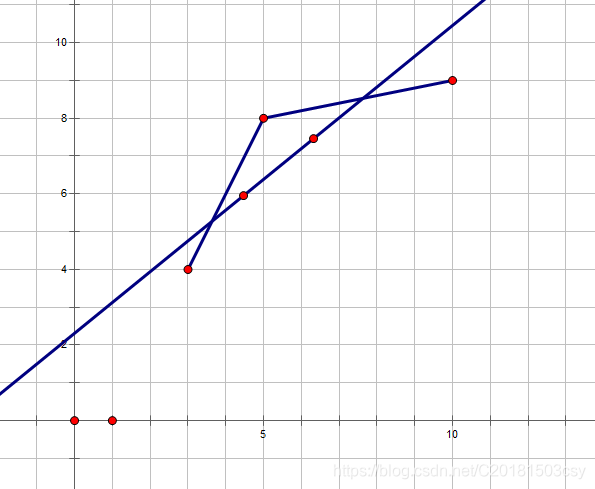
然后我们证明一个东西:若
,则
一定不是最佳决策点。理由如下:
依旧以上面的问题为例:
若
:
则
比
优,
比
优
若
则
比
优,
比
优
若
则
比
优,
比
优
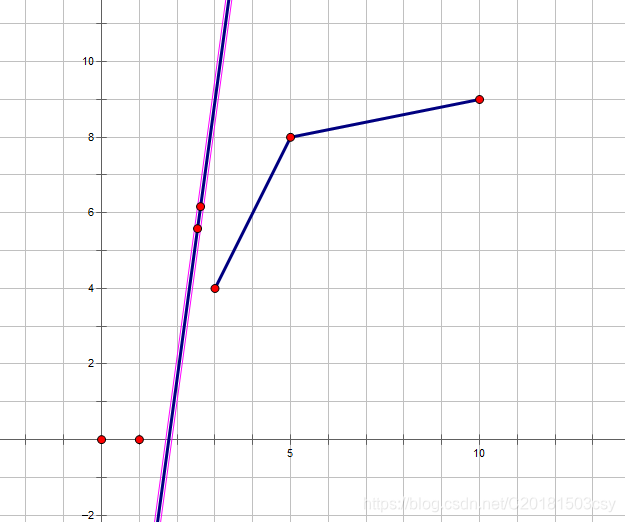
综上,j一定不是最佳决策点。于是,如果将最佳决策点用线连起来,就形成了一个下凸包:
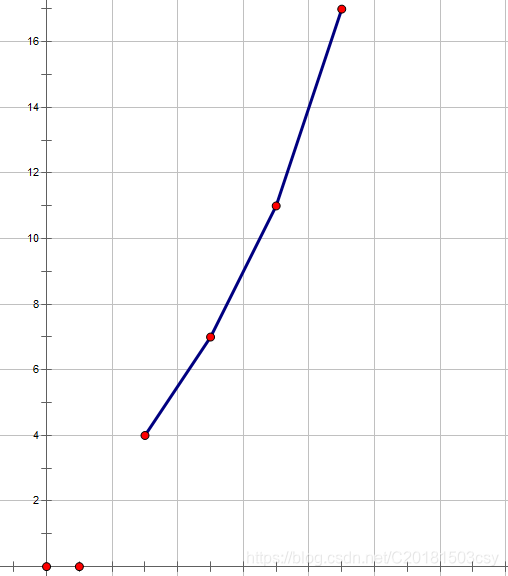
所以
单调队列!
!
由于
单增,所以我们可以不断地将队头小于
的踢出队列,最后剩下的队头即是最佳决策点。
然而,计算
的值需要用除法,于是就要考虑精度的问题。这恶心的东西显然是我们想回避掉的。于是,我们在这里介绍一些判断下凸包的方法。
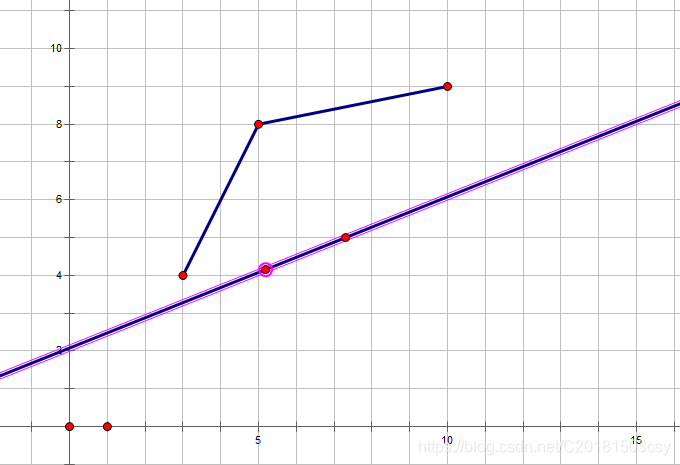
【法1】
如果我们将
看做
,
看做
。我们将它们平移到同一点(原点)(
角不小心画反了,请谅解):
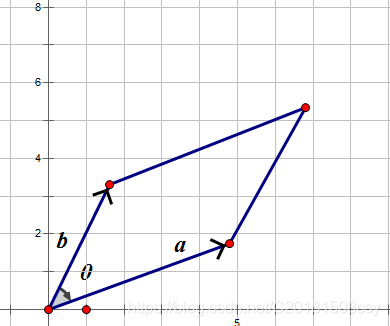
在这种情况下,原图形是一个下凸包。由平行四边形的面积公式:
由于
,故面积大于0。
而如果是这样:

在这种情况下,原图形是一个上凸包。由平行四边形的面积公式:
由于
,故面积小于0。
于是,我们可以根据这个方法,就可以判断下凸包了。
但是,由于涉及到三角函数,又得使用浮点数,还是得考虑精度问题。这样一来,上述分析好像就没啥卵用了耶!
两个向量a和b的叉积
于是我们成功避开了精度问题。
(P.S.:由上述分析可知,
为
,
为
)
【终于可以粘代码了】
#include<cstdio>
#include<cstring>
#include<algorithm>
#define ll long long
using namespace std;
const int mn = 500005;
struct point{
ll x, y;
int p;
}q[mn];
ll f[mn], s[mn];
int h, t;
inline ll cdot(ll x1, ll x2, ll y1, ll y2)
{
return x1 * y2 - x2 * y1;
}
int main()
{
int n, m, i;
while(~scanf("%d%d", &n, &m))
{
for(i = 1; i <= n; i++)
scanf("%lld", &s[i]), s[i] += s[i-1];
h = t = 1, f[1] = s[1] * s[1] + m, q[1] = (point){s[1] << 1, s[1] * s[1] + f[1], 1};
for(i = 2; i <= n; i++)
{
f[i] = s[i] * s[i] + m;
while(t - h > 0 && cdot(q[h].x, s[i] * q[h].x, q[h+1].x - q[h].x, q[h+1].y - q[h].y) <= 0)
h++;
f[i] = min(f[i], f[q[h].p] + (s[i] - s[q[h].p]) * (s[i] - s[q[h].p]) + m);
point tmp = (point) {s[i] << 1, s[i] * s[i] + f[i], i};
while(t - h > 0 && cdot(q[t].x - q[t-1].x, q[t].y - q[t-1].y, tmp.x - q[t].x, tmp.y - q[t].y) <= 0)
t--;
q[++t] = tmp;
}
printf("%lld\n", f[n]);
}
}
【法2】
我们要维护k的单调不下降队列,即队中元素满足:
交叉相乘:
用这个关系维护单调队列即可。
其实,【法2】更简单,运用得更多。若想看看这种方法的运用和实现,看这道题。