本代码包含Matlab和Simulink Robotics Arena“行走机器人”的所有文件。
This entry contains all the files for the “Walking Robots” episodes of the MATLAB and Simulink Robotics Arena.
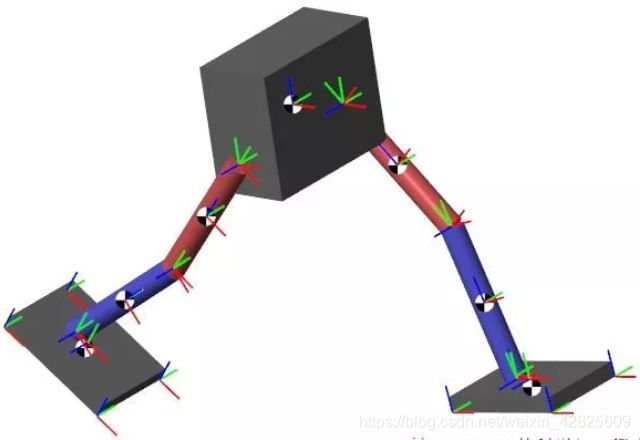
包含行走机器人的Simscape模型,以及不同级别执行器细节的变体形式。
This entry contains Simscape models of a walking robot, including variants for different levels of actuator detail.
此外,您还能够找到一个优化的脚本,该脚本使用遗传算法(全局优化工具箱)寻找最佳行走轨迹,显示腿部的逆向运动学、位置控制和模型预测控制(MPC)的轨迹生成模型。
In addition, you will find an optimization script that uses a genetic algorithm (Global Optimization Toolbox) to find an optimal walking trajectory, as well as models showing leg inverse kinematics, position control, and trajectory generation with Model Predictive Control (MPC).
注意:最初的行走模型是基于MATLAB R2017a。
NOTE: The original walking models work with MATLAB R2017a and onwards.
然而,三维行走模型至少需要MATLAB R2018a ,并有额外的工具箱要求。
However, the 3D walking models require at least MATLAB R2018a and have additional toolbox requirements.
行走机器人的CAD模型可以在下面的网址找到:
The CAD model for the walking robot can be found at https://cad.onshape.com/documents/5fe92a55bb0eaf8b1a0ed6c2/w/58d64f59407477ebd625e16e/e/5295d0860871d6a3d51ca630
为方便起见,还提供了Simscape多体多物理库和Simscape多体接触力库的拷贝副本。
For convenience, local copies of the Simscape Multibody Multiphysics Library and Simscape Multibody Contact Forces Library have been included with this submission.
如果要安装这些工具库的最新版本,可以在下面找到它们:
If you would like to install the latest version of these libraries, you can find them below:
Simscape多体多物理库
- Simscape Multibody Multiphysics Library: https://www.mathworks.com/matlabcentral/fileexchange/37636-simscape-multibody-multiphysics-library
Simscape多体接触力库
- Simscape Multibody Contact Forces Library: https://www.mathworks.com/matlabcentral/fileexchange/47417-simscape-multibody-contact-forces-library
源代码下载地址:
http://page2.dfpan.com/fs/9l7c1j0202c1e229163/
更多精彩文章请关注微信号: