一、相机标定基本理论
1、相机成像系统介绍
2、相机内参介绍
3、相机外参介绍
二、相机标定方法
1、采样标准pattern模板图像若干
1 import cv2 2 cap = cv2.VideoCapture(0) 3 count = 0 4 while True: 5 ret, frame = cap.read() 6 cv2.imshow(winname='Video_Show', mat=frame) 7 8 if cv2.waitKey(1) & 0xFF == ord('q'): 9 break 10 if cv2.waitKey(1) & 0xFF == ord('r'): 11 cv2.imwrite('ResPic' + str(count) + '.jpg', frame) 12 count += 1 13 print 'Get new pic!' 14 cap.release()
1)系统实际拍摄场景 2)硬件设备Logitech_Camera


3)捕获素材如下所示(部分图像)

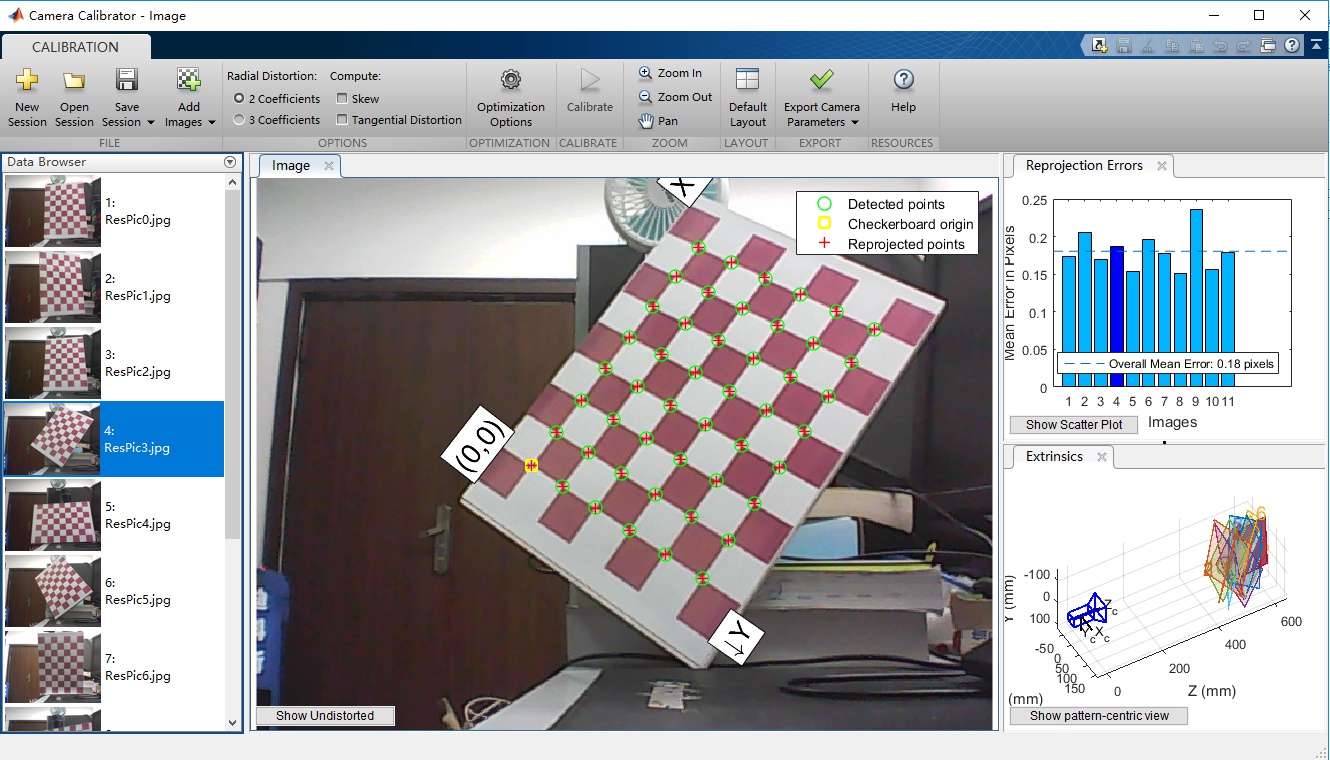
2、使用MATLAB工具箱进行相机标定
1)使用流程:
step1:打开Matlab 2015软件,上方栏目有一个应用程序,在应用程序下有一个工具箱,Camera Calibrator.
step2:打开工具箱,单击左上角的Add Images,选中捕获的所有的ResPic?.jpg,打开之后需要选择方块大小,取d=30mm.
step3:点击工具箱中间的绿色按钮Calibrate,单击开始我们的内参以及外参的计算和仿真,之后控制台输出Camera参数.
step4:我们可以选择到处MATLAB Script来分析Camera的标定流程.
2)仿真结果:
MATLAB导出的脚本代码:Camera_Calibrator.m


1 % Auto-generated by cameraCalibrator app on 13-Mar-2019 2 %------------------------------------------------------- 3 4 5 % Define images to process 6 imageFileNames = {'D:\PythonDevelopment\Opencv_Test\data\ResPic0.jpg',... 7 'D:\PythonDevelopment\Opencv_Test\data\ResPic1.jpg',... 8 'D:\PythonDevelopment\Opencv_Test\data\ResPic2.jpg',... 9 'D:\PythonDevelopment\Opencv_Test\data\ResPic3.jpg',... 10 'D:\PythonDevelopment\Opencv_Test\data\ResPic4.jpg',... 11 'D:\PythonDevelopment\Opencv_Test\data\ResPic5.jpg',... 12 'D:\PythonDevelopment\Opencv_Test\data\ResPic6.jpg',... 13 'D:\PythonDevelopment\Opencv_Test\data\ResPic7.jpg',... 14 'D:\PythonDevelopment\Opencv_Test\data\ResPic8.jpg',... 15 'D:\PythonDevelopment\Opencv_Test\data\ResPic9.jpg',... 16 'D:\PythonDevelopment\Opencv_Test\data\ResPic10.jpg',... 17 }; 18 19 % Detect checkerboards in images 20 [imagePoints, boardSize, imagesUsed] = detectCheckerboardPoints(imageFileNames); 21 imageFileNames = imageFileNames(imagesUsed); 22 23 % Generate world coordinates of the corners of the squares 24 squareSize = 30; % in units of 'mm' 25 worldPoints = generateCheckerboardPoints(boardSize, squareSize); 26 27 % Calibrate the camera 28 [cameraParams, imagesUsed, estimationErrors] = estimateCameraParameters(imagePoints, worldPoints, ... 29 'EstimateSkew', false, 'EstimateTangentialDistortion', false, ... 30 'NumRadialDistortionCoefficients', 2, 'WorldUnits', 'mm', ... 31 'InitialIntrinsicMatrix', [], 'InitialRadialDistortion', []); 32 33 % View reprojection errors 34 h1=figure; showReprojectionErrors(cameraParams, 'BarGraph'); 35 36 % Visualize pattern locations 37 h2=figure; showExtrinsics(cameraParams, 'CameraCentric'); 38 39 % Display parameter estimation errors 40 displayErrors(estimationErrors, cameraParams); 41 42 % For example, you can use the calibration data to remove effects of lens distortion. 43 originalImage = imread(imageFileNames{1}); 44 undistortedImage = undistortImage(originalImage, cameraParams); 45 46 % See additional examples of how to use the calibration data. At the prompt type: 47 % showdemo('MeasuringPlanarObjectsExample') 48 % showdemo('StructureFromMotionExample')
3、采用Python及Opencv进行相机标定
三、其他扩展内容
四、参考文献&参看链接
相机标定Reference01:https://www.cnblogs.com/Jessica-jie/p/6596450.html
相机标定Reference02:https://www.cnblogs.com/Undo-self-blog/p/8448500.html
相关文件参考我的博客园文件:https://files.cnblogs.com/files/uestc-mm/Camera_calibration.7z