软件:
Matlab 2014a,VS 2013
棋盘格标定板:
方格边长0.5mm,横向角点数19个,纵向角点数15个。
相机内参估算
其实在已知相机的某些参数后,不进行标定也可以估计出大致的内参矩阵。
根据上一篇博文中对图像坐标系、相机坐标系和世界坐标系的学习,可以知道相机内参的形式:
fx 0 u0
K = 0 fy v0
0 0 1内参数为fx,fy,u0,v0。其中:fx=f/dx, fy=f/dy;u0,v0为主点坐标。
理想情况下:fx=fy;u0,v0分别为分辨率的一半,所以在已知焦距、图像分辨率和传感器尺寸等参数后,可以对理想情况下的内参进行估算。
以网上经常作为举例对象的NiKon D700相机为例:
焦距 f=35mm,最高分辨率 4256*2832,传感器尺寸 36.0mm*23.9mm
则可计算出:
dx=36.0/4256,dy=23.9/2832 —> fx=f/dx=4137.8,fy=f/dy=4147.3
u0=4256/2=2128,v0=2832/2=1416
内参矩阵即为:
4137.8 0 2128
K = 0 4147.3 1416
0 0 1但在对精度要求比较高的场合还是需要对相机进行标定,得到相机实际的内参和畸变参数。
Matlab标定工具箱
参考博客:http://blog.csdn.net/jameshater/article/details/53172333
该博客中工具箱各功能的使用介绍得十分详细,适合小白入门参考和需要复杂功能时的查阅。
由于我前期只需要简单标定得到内参,所以只进行最主要的三个步骤:读入图片,提取角点和相机标定。
过程记录如下:
1.标定工具箱的下载安装:
可按照参考博客中的网址下载。
下载后解压到matlab的工作路径,在命令窗口使用calib_gui打开。
2.读入图片
选择Standard(all the images are stored in memory)。

选择image names(在此之前需要将文件夹选为存放标定图片的那个)。

输入图片基名Basename(假如图片的存储名称为img1.jpg,则基名为数字前的img。我电脑中存储的直接为1.jpg,2.jpg…,所以此处直接键入回车)。

输入图片格式(根据自己图片存储情况和提示输入即可,我的是jpg格式,所以输入j)。

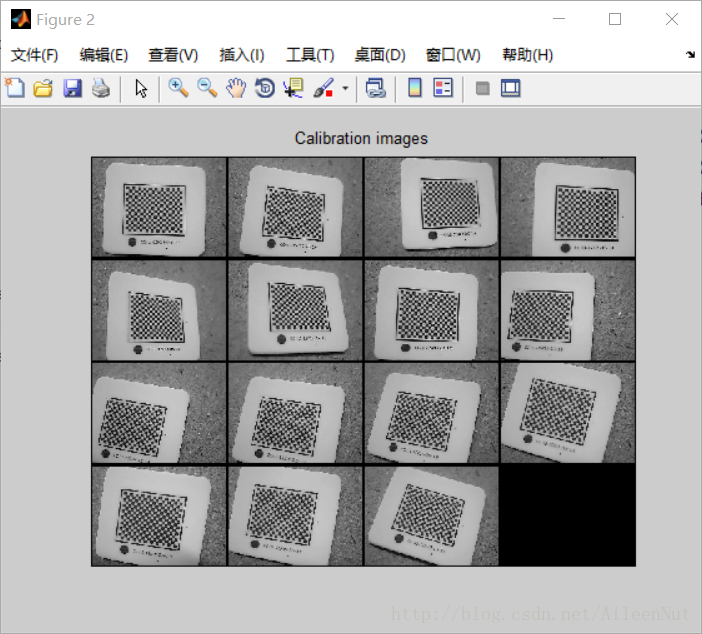
之后程序自动读取该文件夹下的图片并显示。
3.提取角点
选择Extract grid corners。

选择是否处理所有图片,可以输入图片索引,如[1,2,3],默认则处理第一步读取进的全部图片,无特殊需求则此处选择回车默认。

选择提取角点的窗口尺寸和是否自动提取,此处均回车默认即可。

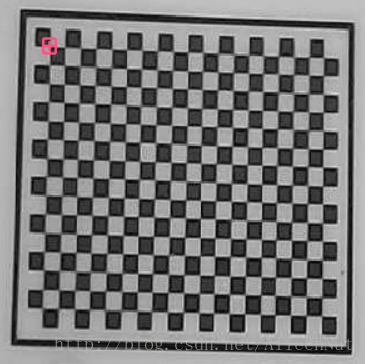
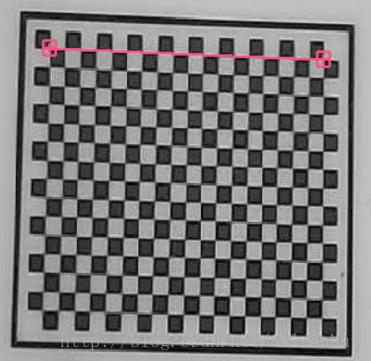
显示第一张标定图片,手动选择四个边缘角点,一般按照:左上,右上,右下,左下的顺序。
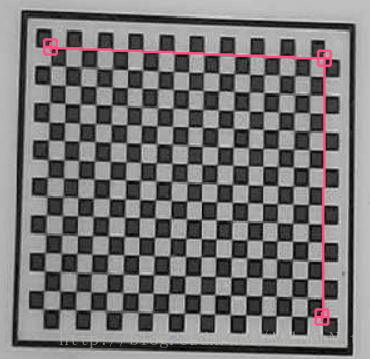
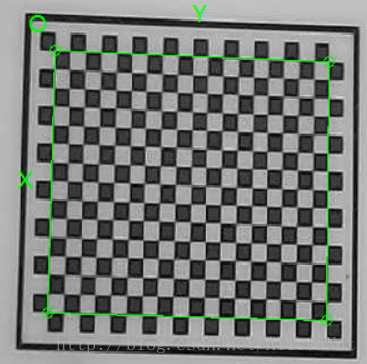
选择了四个角点后,需要输入x方向和y方向上的棋盘格小方格边长,我这里的dx=dy=0.5mm,故输入0.5。

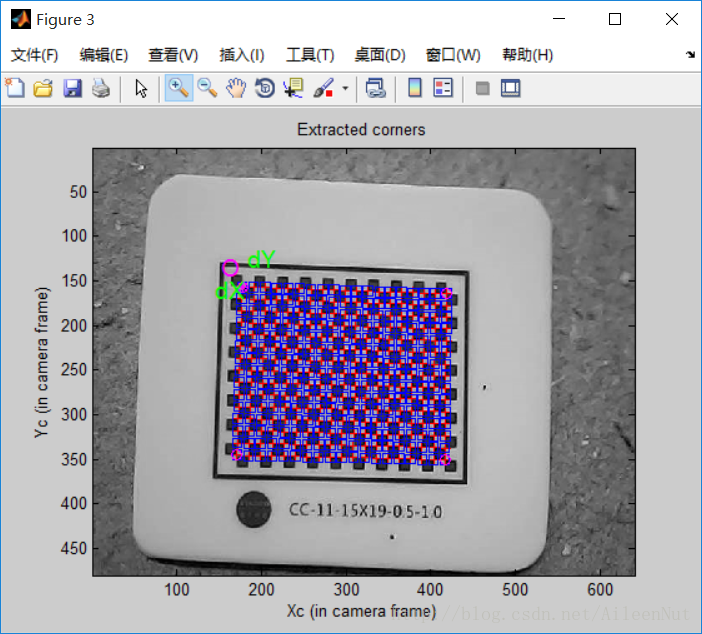
显示提取角点后的图片,选择是否需要猜测畸变参数。根据角点提取效果自行选择,一般提取效果都很好,可以直接默认回车不猜测畸变;如果提取效果不理想,畸变较大,可以试凑查看效果,一般该参数在-1和1之间。


不断循环该过程直至所有图片的角点提取完毕。
4.相机标定
选择Calibration,即可得到标定结果。

选择Save,保存标定结果,文件名为Calib_Results.m。

OpenCV自带标定程序
参考博客:http://blog.csdn.net/t247555529/article/details/47836233#comments
1.新建工程demo,配置OpenCV环境。
2.生成标定时读取图片所需的yaml图片列表。
(1)添加源文件imagelist_creator.cpp,编译执行,在Debug文件夹中得到demo.exe。
(2)进入cmd,cd进入工程路径下的Dubug文件夹。
输入命令:demo imagelist.yaml 图片名
其中图片名是标定过程中使用的所有图片的名字,以我自己为例,此处键入1.jpg 2.jpg 3.jpg …
3.相机标定
(1)删除工程下的源文件imagelist_creator.cpp,添加calibration.cpp,编译执行,在Debug文件夹中得到demo.exe。
(2)将标定使用的图片放在Debug文件夹下。
(3)进入cmd,cd进入工程路径下的Debug文件夹。
输入命令: demo -w 19 -h 15 -s 0.5 imagelist.yaml
其中:-w为每行的角点个数,-h为每列的角点个数,-s为棋盘格的方格边长,单位为mm。
(4)标定结果会保存在Debug文件夹下的out_camera_data.yml中,此类文件可以使用Notepad++打开。
二者对比
1.Matlab标定工具箱
需要指定小方格的长宽(单位mm),并手动提取每张标定图的四个边角点,比较麻烦,但角点提取和标定效果较好。

2.OpenCV自带标定程序
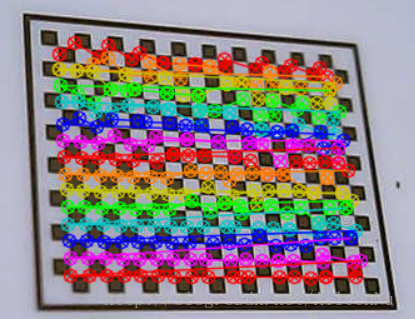
需要指定小方格的边长(单位mm),行和列的角点数,自动提取,比较方便,但角点提取和标定效果有时不如人意。
可能比较适用于OpenCV示例中大且方格数量少的棋盘格标定板,对于我使用的0.5mm且方格数量较多的微距标定板效果很不理想。
3.其他OpenCV标定程序
在OpenCV官方自带标定程序标定失败后,也找了很多网上其他OpenCV标定程序。其在角点提取和处理上会比自带程序好很多,不会如此混乱。但在我将棋盘格小方格参数修改为标定板参数0.5mm后,会出现矩阵和参数无法计算,均为无效点1.#QNAN的情况。
根据目前标定的效果,虽然Matlab半自动有点麻烦,但我还是决定使用Matlab标定工具箱了…
最后,关于使用OpenCV标定的情况,如果有更好更精确的方法,或者能解决文中的问题,还望各位大牛不吝赐教,谢谢!