Matlab——卡尔曼滤波器(matlab实现)
一、原理:看了网上很多资料,这两个讲的比较好。
1.高中生能看懂的详细通俗讲解卡尔曼滤波Kalman Filter原理及Python实现教程 https://blog.csdn.net/varyshare/article/details/95065650
2. 图像处理之目标跟踪(一)之卡尔曼kalman滤波跟踪(主要为知识梳理)(转载)https://blog.csdn.net/coming_is_winter/article/details/79048700
二、方程概述:
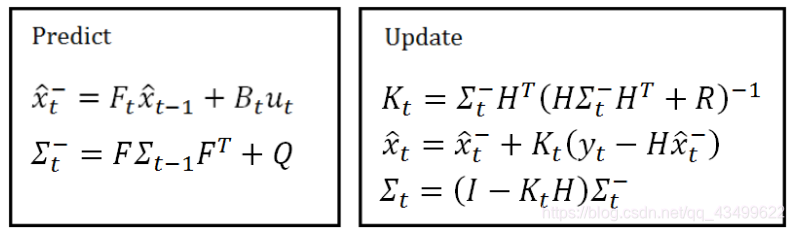
1、状态预测方程与不确定性的传递

1、卡尔曼滤波方程组中的第一条公式,状态预测公式,而F就是状态转移矩阵,它表示我们如何从上一状态来推测当前状态。而B则是控制矩阵,它表示控制量u如何作用于当前状态。
2、卡尔曼滤波方程组中的第二条公式,它表示不确定性在各个时刻间的传递关系。
3、输出变量都是输入变量的线性组合,这也就是称卡尔曼滤波器为线性滤波器的原因所在。
4、卡尔曼滤波算法是一种基于最小均方误差的最优线性递归滤波方法,以状态方程和观测方程为基础,运用递归方法来预测线性系统变化。
- F:状态转移矩阵,它表示我们如何从上一状态来推测当前状态。
- B:控制矩阵,它表示控制量u如何作用于当前状态。
2、协方差矩阵 Σ -
-
 : 系统中每一个时刻的不确定性都是通过协方差矩阵 Σ 来给出的。
: 系统中每一个时刻的不确定性都是通过协方差矩阵 Σ 来给出的。- 这种不确定性在每个时刻间还会进行传递。
- 不仅当前物体的状态(例如位置或者速度)是会(在每个时刻间)进行传递的,而且物体状态的不确定性也是会(在每个时刻间)进行传递的。
- 这种不确定性的传递就可以用状态转移矩阵来表示
-
Q: 协方差矩阵 Q 来表示预测模型本身的噪声(也即是噪声在传递过程中的不确定性)
3、卡尔曼系数K(t)

-
K:称为卡尔曼系数,它也是一个矩阵,它是对残差的加权矩阵,有的资料上称其为滤波增益阵。
-
K首先权衡预测状态协方差矩阵Σ和观测值矩阵R的大小,并以此来觉得我们是更倾向于相信预测模型还是详细观测模型。
- 如果相信预测模型多一点,那么这个残差的权重就会小一点。
- 如果相信观察模型多一点,这个残差的权重就会大一点。
-
K(滤波增益阵)还负责把残差的表现形式从观测域转换到了状态域。
- 观测值与状态值所采用的描述特征或者单位都有可能不同,显然直接用观测值的残差去更新状态值是不合理的。
-
R(协方差矩阵)来表示观测中的不确定性。
-
H:真实状态到其观测状态的一个变换关系,这个变换关系我们记为h(•),而且这个h(•)还是一个线性函数,可记为矩阵变换H()。
4、对估计值进行修正

 是根据上一状态推测而来的,那么它与“最优”估计值之间的差距现在就是等式右端加号右侧的部分。
是根据上一状态推测而来的,那么它与“最优”估计值之间的差距现在就是等式右端加号右侧的部分。 表示实际观察值与预估的观测值之间的残差。这个残差再乘以一个系数K就可以用来对估计值进行修正。K称为卡尔曼系数。
表示实际观察值与预估的观测值之间的残差。这个残差再乘以一个系数K就可以用来对估计值进行修正。K称为卡尔曼系数。
5、噪声分布 Σ 进行更新。

- 对最优估计值的噪声分布进行更新。
- 我们将这五个公式分成预测组和更新组。预测组总是根据前一个状态来估计当前状态。更新组则根据观测信息来对预测信息进行修正,以期达到最优估计之目的。
-----
- 我们将这五个公式分成预测组和更新组。预测组总是根据前一个状态来估计当前状态。更新组则根据观测信息来对预测信息进行修正,以期达到最优估计之目的。
三、Matlab程序
%kalman滤波器
%阿汪先生的博客.ws
clc %清除命令行
clear %清空变量
N=200; %数据个数N
w(1)=0; %w为预测模型的过程噪声
w=randn(1,N) %randn()创建随机矩阵,服从正态分布
x(1)=0; %初始值
f=1; %a为方程1中的状态转移矩阵,这里为一维变量
%x的预测值
for k=2:N;
x(k)=f*x(k-1)+w(k-1); %方程1,为x的推测值
end
%实际观察值Y
H=0.4; %H为方程中H(k)
y=H*x+V; %Y为实际观察值
%预测不确定性
q2=std(w); %返回一个包含与每列对应的标准差的行向量,预测模型
Q=q2.^2; % Q 预测模型本身的噪声(协方差矩阵)
%观察不确定性
V=randn(1,N); %V为观察噪声,randn()创建随机矩阵,服从正态分布
q1=std(V); %返回一个包含与每列对应的标准差的行向量
R=q1.^2; % R 来表示观测中的不确定性(协方差矩阵)
%x的修正值(经卡尔曼滤波的值)
p(1)=0; %协方差矩阵 Σ初值,代表一个时刻的不确定性
s(1)=0; %修正值初值
for t=2:N;
p1(t)=f.^2*p(t-1)+Q; %方程2,p1(t)协方差矩阵 Σ-,由上一状态推测而来
k(t)=H*p1(t)/(H.^2*p1(t)+R); %方程3 ,k(t)为卡尔曼系数
s(t)=f*s(t-1)+k(t)*(y(t)-f*H*s(t-1)); %方程4,根据估计值进行修正
p(t)=p1(t)-H*k(t)*p1(t); %方程5,p(t)为协方差矩阵 Σ,对最优值的噪声分布进行更新
end
%画曲线图
t=1:N;
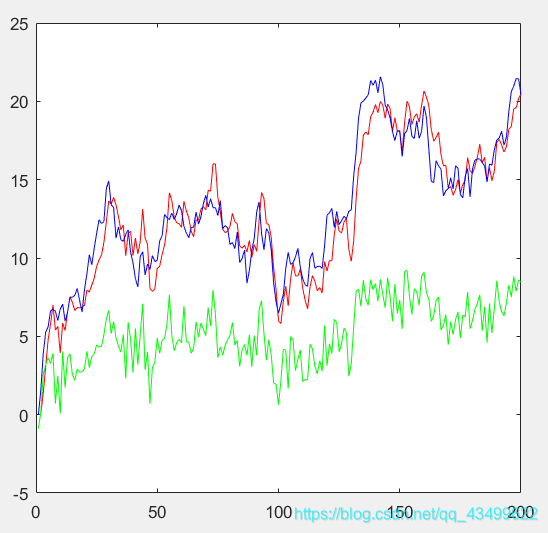
plot(t,s,'r',t,y,'g',t,x,'b');
%红色曲线:x的修正值
%绿色曲线,x的实际观察值
%蓝色曲线,x的预测值
程序效果