【slam】激光雷达的数学模型之似然场模型
光束模型的缺点
- 计算量大(每一个位姿需要进行N次raytracing,N为每一帧激光的激光束数量)
- 在非结构化环境中(比较杂乱的环境中),使用光束模型会导致当位姿发生微小变化时,得分从非常高一下改变为趋近于零,而且除了最优解没有次优解的存在,可以说有一些病态的特点
似然场模型likehood model
-
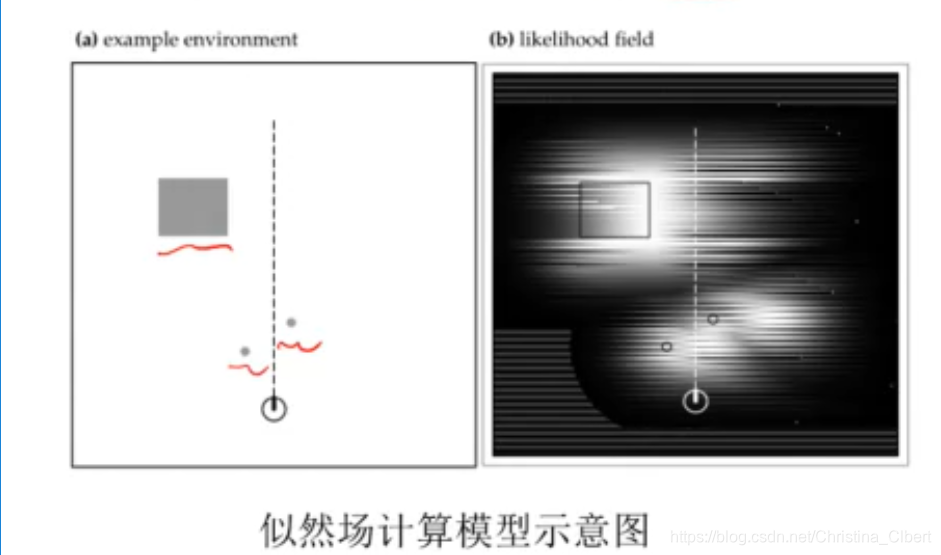
似然场模型相对于光束模型,优势相当明显。
传感器和位姿都可能存在噪声,从而得到一个高斯分布,用一个高斯核对每一个障碍物进行高斯平滑。随着到障碍物的距离增大得分即降低 ,相当于以障碍物为期望的高斯分布。 -
不需要计算期望值,因为已经对图像进行模糊处理,不需要再经过raytracking计算得分,直接通过查表得到,计算量小。
-
同时适合于结构化环境和非结构化环境中
