首页
文章
归档
无人驾驶车辆模型预测控制第六章测试中
其他
2021-04-03 22:12:07
阅读次数: 0
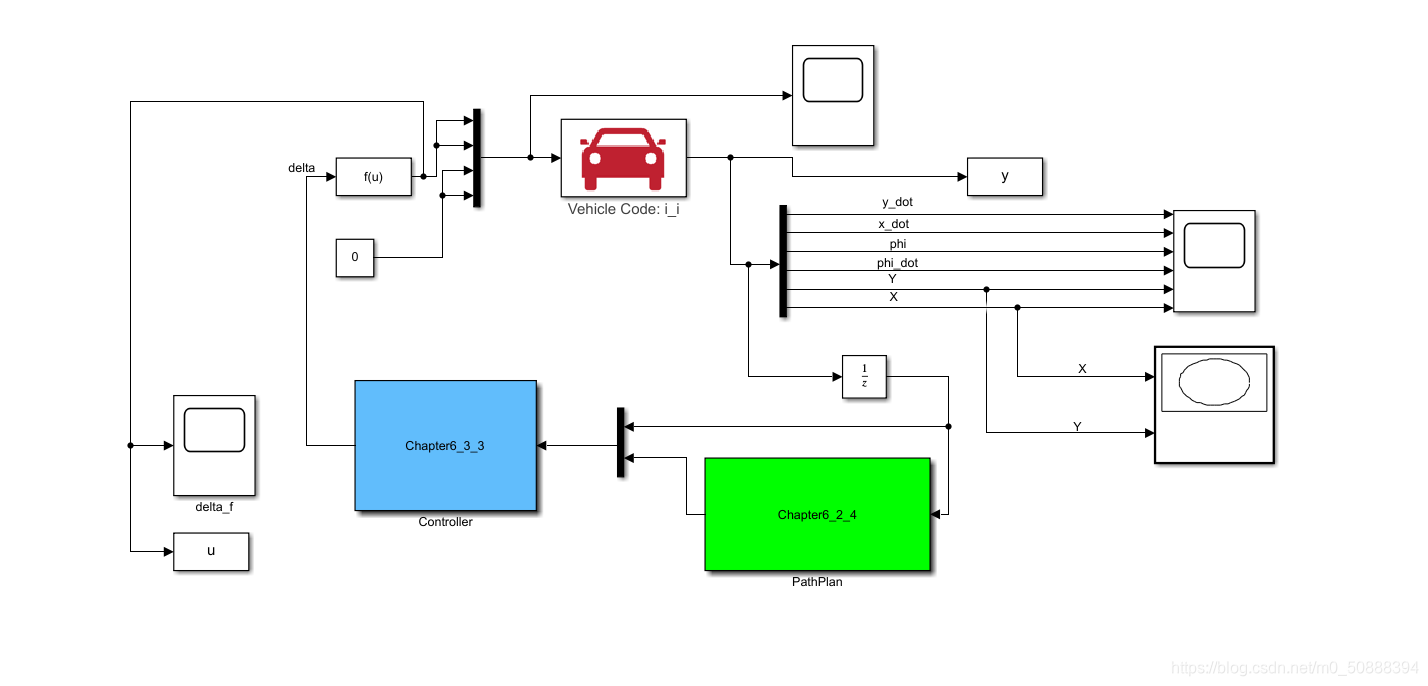
1.Simulink框图
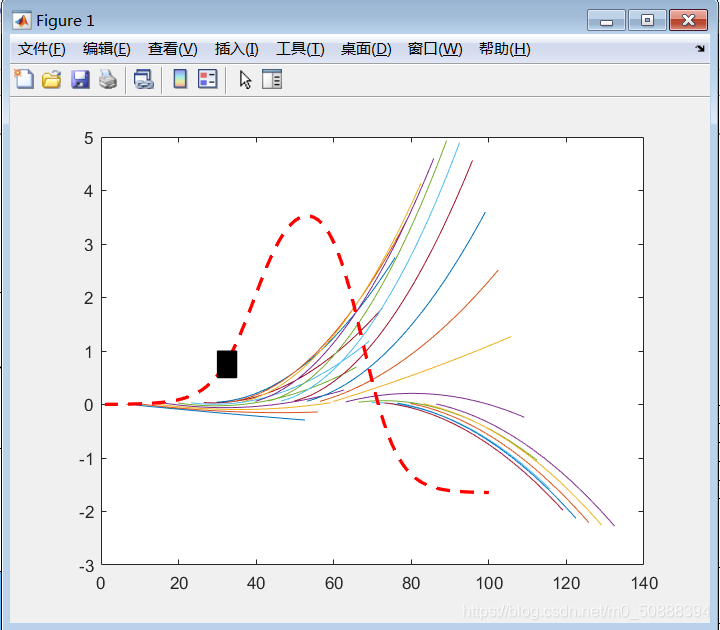
2.轨迹重规划
竟然越规划越远!!!!!
猜你喜欢
转载自
blog.csdn.net/m0_50888394/article/details/115348119
无人驾驶车辆模型预测控制第六章测试中
无人驾驶车辆模型预测控制第六章核心
读《无人驾驶车辆模型预测控制》
无人驾驶车辆模型预测控制第五章(下)
无人驾驶车辆模型预测控制第五章(上)
《无人驾驶车辆模型预测控制第一版》第五章代码(下)
《无人驾驶车辆模型预测控制(第一版)》中的错误更正与代码解析(一)
无人驾驶车辆模型预测控制书中符号总结
无人驾驶车辆模型预测控制(双移线)
无人驾驶车辆模型预测控制MPC轨迹跟踪(直线篇)
无人驾驶车辆模型预测控制MPC轨迹跟踪代码(圆形篇)下
无人驾驶车辆模型预测控制MPC轨迹跟踪(圆形篇)上
无人驾驶运动控制(二):模型预测控制
无人驾驶车辆模型预测控制(二)——车辆运动学和动力学建模
无人驾驶——2.MPC模型预测控制
《无人驾驶车辆模型预测控制》书中第四章仿真轨迹为直线及索引超出数组范围
无人驾驶车辆模型预测控制第五章实际行驶轨迹为直线问题解决
【无人驾驶车辆模型预测】1 规划与控制综述
无人驾驶汽车系统入门(十)——基于运动学模型的模型预测控制
无人驾驶运动学模型——线性时变模型预测控制的思路推演过程
第六章 BOM模型
第六章光照模型
第六章 软件测试
OSTEP第六章测试
第六章测试
无人驾驶运动学模型——线性时变模型预测控制的思路推演过程_百叶书的博客-CSDN博客_线性时变模型预测控制 转
基于动力学模型的无人驾驶车辆主动转向控制
第六章
第六章 访问权限控制
第六章访问权限控制
今日推荐
Electron中的关于静态资源加载问题解决方案
《Cursor-AI编程》基础篇-界面指南
《Cursor-AI编程》基础篇-Tab代码智能补充
《Cursor-AI编程》基础篇-Composer功能详解
《Cursor-AI编程》基础篇-Chat功能详解
《Cursor-AI编程》进阶篇-自定义模型
《Cursor-AI编程》进阶篇-上下文详解
【大模型系列篇】最强检索增强技术GraphRAG基本原理详解
【大模型系列篇】基于Ollama和GraphRAG v2.0.0快速构建知识图谱
解释什么是迁移学习?在 CNN 中如何应用?(面试题200合集,高频、关键)
解释数据增强(Data Augmentation)的概念和方法((面试题200合集,高频、关键))
揭秘大模型“魔法”:Function Calling 让 AI 不止会说,更能“做”!
周排行
ConfigurationClassParser类的parse方法源码解析
基础大讲堂-java 位运算符
ConsecutiveInteger判断给定的整数n能否表示成连续的m(m>1)个正整数之和
多项式问题之六——多项式快速幂
Spring Security技术栈开发企业级认证与授权(四)RESTful API服务异常处理
Linux基础命令---apachectl
MATLAB中的线性插值
Unity编辑器拓展之十七:NGUI ComponentSelector增加搜索框
SqlServer 备份还原教程
[Unity动画]01.
每日归档
更多
2025-04-12(10529)
2025-04-11(9561)
2025-04-10(1213)
2025-04-09(10354)
2025-04-08(12998)
2025-04-07(0)
2025-04-06(0)
2025-04-05(0)
2025-04-04(0)
2025-04-03(0)