参考项目:GitHub - guoX66/TL_SLR
一、基础配置
1、系统烧录
!!!确认树莓派所支持的系统位数,本文均按照64位的系统展开!!!
!!!若为32位系统,请寻找相应的资源或更换支持64位系统的树莓派设备!!!
前往树莓派官网下载64位系统并烧录,下载地址:https://downloads.raspberrypi.com/raspios_oldstable_full_arm64/images/raspios_oldstable_full_arm64-2023-12-06/2023-12-05-raspios-bullseye-arm64-full.img.xz
目前还是选择 Debian 11 bullseye的legacy版本,镜像资源比较完善。新版bookworm等后续相关资源完善后再考虑
2、更新配置和软件
系统进入等相关问题暂不赘述,在有显示屏的情况下直接联网激活便可进入
没有显示屏的情况可以参考以下博文进行WIFI配置、SSH和VNC连接。
使用电脑通过VNC Viewer远程连接树莓派4B_vnc viewer 树莓派-CSDN博客
进入系统后运行打开命令行运行以下命令编辑sources.list文件
sudo nano /etc/apt/sources.list删除原有所有内容,写入以下内容
deb https://mirrors.ustc.edu.cn/debian/ bullseye main contrib non-free
# deb-src http://mirrors.ustc.edu.cn/debian bullseye main contrib non-free
deb https://mirrors.ustc.edu.cn/debian/ bullseye-updates main contrib non-free
# deb-src http://mirrors.ustc.edu.cn/debian bullseye-updates main contrib non-free
deb https://mirrors.ustc.edu.cn/debian-security bullseye-security main contrib non-free
# deb-src http://mirrors.ustc.edu.cn/debian-security/ bullseye-security main non-free contrib按ctrl+X保存退出
在命令行运行以下内容
sudo nano /etc/apt/sources.list.d/raspi.list删除原有所有内容,写入以下内容
deb https://mirrors.ustc.edu.cn/archive.raspberrypi.org/debian/ bullseye main
#deb-src https://mirrors.ustc.edu.cn/archive.raspberrypi.org/debian/ bullseye main按ctrl+X保存退出
软件镜像源配置完成,在命令行运行以下命令更新配置和软件
sudo apt-get update
sudo apt-get upgrade -y更新完成后 sudo reboot 重启树莓派
3、摄像头接入
博主项目中使用的是新版的CSI摄像头Raspberry Pi Camera Module 3,需要bullseye以上的系统才可以支持使用,使用时请注意!!!

注意要将legacy camera关闭,输入以下命令进行设置
sudo raspi-config
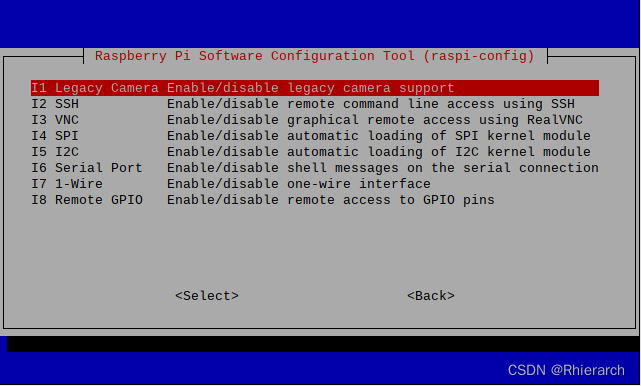
选择Interface Option
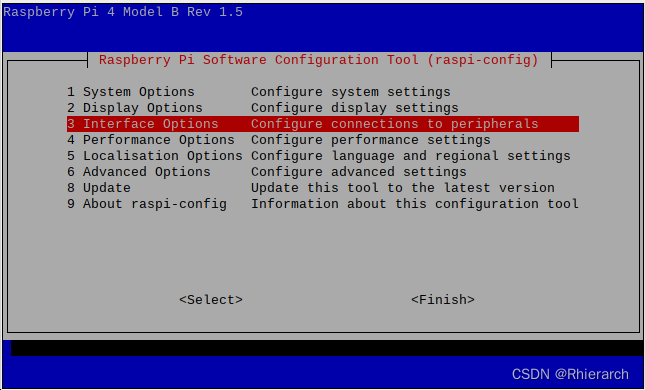
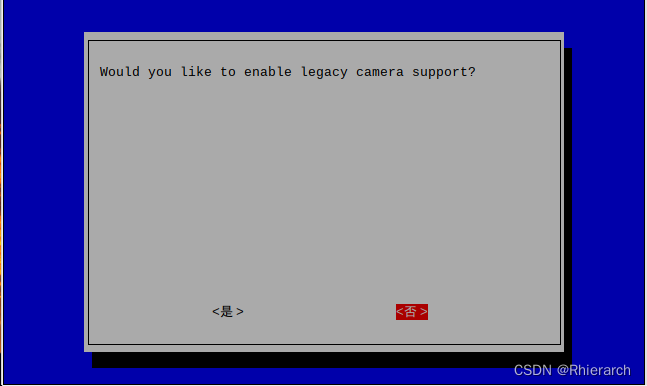
第一项Legacy camera确保关闭,随后重启树莓派
重启后检测摄像头是否连上
libcamera-hello出现类似以下响应和摄像头画面时,即代表摄像头连接成功

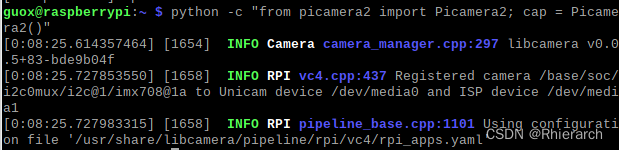
检查picamera2库是否能使用
python -c "from picamera2 import Picamera2; cap = Picamera2()"出现以下响应则代表可以使用
4、pip换源
在命令行运行以下内容
sudo nano /etc/pip.conf删除第一行以外的内容,写入以下内容
extra-index-url=https://mirrors.aliyun.com/pypi/simple按ctrl+X保存退出
最后在命令行运行以下内容
pip config set global.index-url https://pypi.douban.com/simple/二、python相关资源配置
1、视觉库安装
pip install opencv-python
pip install opencv-contrib-python
pip install torch
pip install torchvision
若torch安装出现问题,可以下载好相应的whl包再传到树莓派进行安装
pip install torch-2.0.0-cp39-cp39-manylinux2014_aarch64.whl
pip install torchvision-0.15.1-cp39-cp39-manylinux2014_aarch64.whl2、openvino安装
下面做相应介绍
下载相应的安装包,注意是2022.03的版本
创建文件夹
sudo mkdir -p /opt/intel/openvino_2022将安装包传到树莓派,解压到新建的文件夹中
sudo tar -xf l_openvino_toolkit_debian9_2022.3.1.9227.cf2c7da5689_arm64.tgz --strip 1 -C /opt/intel/openvino_2022
安装cmake
sudo apt install cmake激活openvino
source /opt/intel/openvino_2022/setupvars.sh若需要命令行自动激活openvino,则运行以下命令
echo "source /opt/intel/openvino_2022/setupvars.sh" >> ~/.bashrc3、NCS2接入
由于树莓派算力有限,无法较好完成神经网络相关的视觉任务,需要借用NCS2神经计算棒
在树莓派USB3.0接口(蓝色接口)上插入NCS2神经计算棒

NCS2神经计算棒示意图
按以下步骤使用NCS2进行IR(openvino)模型推理:
1 创建USB用户组规则
sudo usermod -a -G users "$(whoami)"2 重启树莓派
3 安装openvino依赖
sudo -E /opt/intel/openvino_2022/install_dependencies/install_openvino_dependencies.sh4 安装NCS2依赖
sudo -E /opt/intel/openvino_2022/install_dependencies/install_NCS_udev_rules.sh运行以下命令查看是否安装完成
python -c "from openvino.runtime import Core; print(Core().available_devices)"当出现MYRIAD服务的时候,说明已经可以使用NCS2进行IR(openvino)模型推理了

*三、字体配置(可选)
在使用树莓派和opencv-python时,一般没有中文字体可以使用。
博主用向matplotlib中添加中文字体的方式来替代
将下载好的SimHei.ttf 字体文件传到树莓派上,然后移动到以下文件夹
sudo mv SimHei.ttf /usr/share/fonts/truetype/noto进入用户缓存
cd /home/[这里填用户名]/.cache将matplotlib的缓存删除
sudo rm -rf matplotlib在下次使用matplotlib时,添加的SimHei字体就会被添加进matplotlib可用字体中