### 记录一下使用Python实现ROS平台A*算法路径规划 ###
代码可自取 :Xz/little_project![]() https://gitee.com/Xz_zh/little_project.git
https://gitee.com/Xz_zh/little_project.git
目录
一、算法介绍
关于A*算法,这里给出一个实例进行分析。首先定义一些变量便于解释A*算法。
| (xs ,ys) |
起点 |
| (xd ,yd) |
终点 |
| (xi ,yi) |
查询的第i个点 |
| hx,hy |
曼哈顿距离参数 |

如上图所示,现在有一任务:需要找到从起点(xs ,ys)到终点(xd ,yd)的最短路径(黑色部分为障碍物)。首先根据A*算法的代价函数:
从起点出发向四周扩散,记录每个点的位置及代价,每次从代价最小的点进行下一次查找。如图,此时起点的代价f(0) = g(0)+h(0),由于是起点,可定义g(0)=0,h(0)=hx+hy(曼哈顿距离),即f(0) = 3+4=7。接下来搜索下一节点。
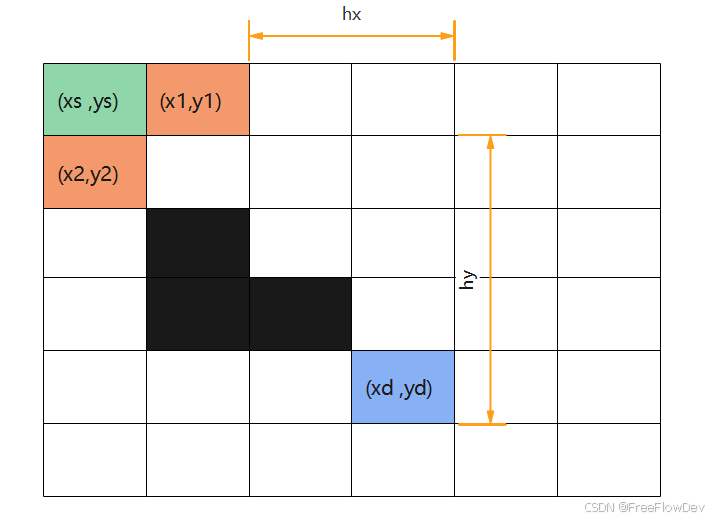
此时计算第一个点的代价,g(1) = g(0) +1=1,h(1) = hx + hy =2 + 4 =6即f(1) = 1 + 6 =7。依此类推,会发现f(2) = 7=f(1),搜索的第一个点和第二个点的代价相同,会继续进行搜索。
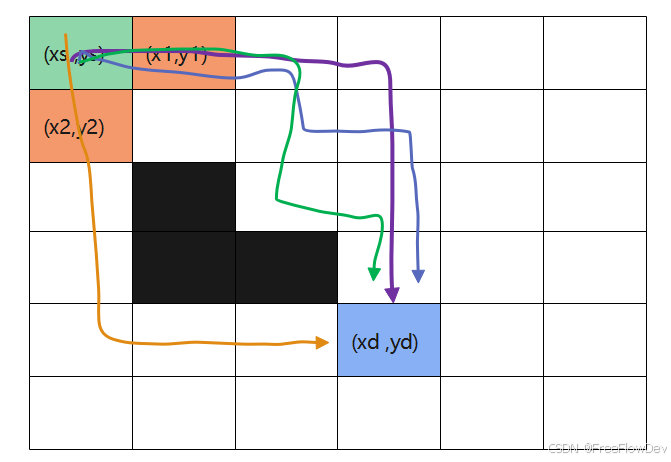
在此规则上,你会发现从起点到终点会有很多最短路径,这是由于巡点的规则和障碍物分布所致,导致这个最短路径有多条。
再看下一个例子:
在上一条件规则下,修改障碍分布,同时规定搜索的点也能斜着进行搜索,如图所示:
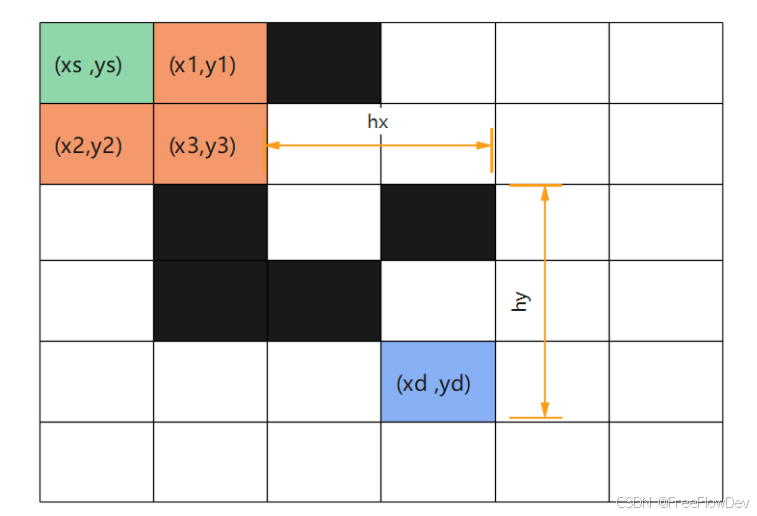
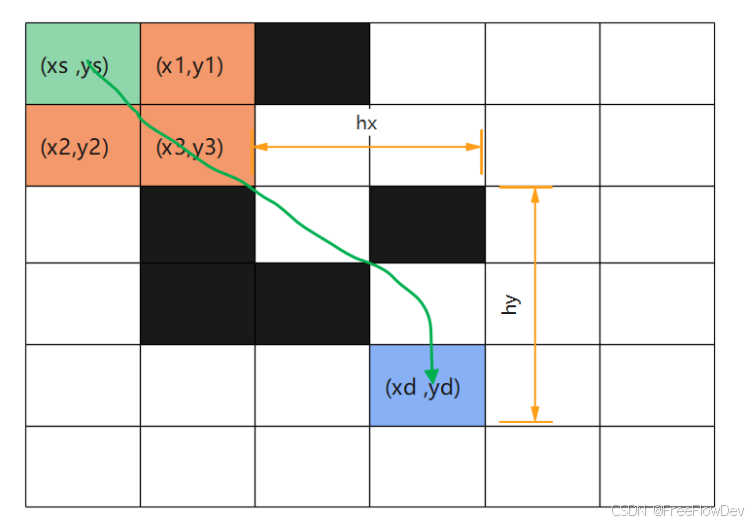
通过计算,不难得出g(3) = 1 ,h(3) = 2+3=5,f(3) = 6。其中f(3)>f(1)=f(2),随后就会选择第三个点继续搜索,不断迭代上诉过程,直至到达终点,即找到最短路径,中间过程不在赘述。
二、思路分析
要求使用A*算法实现路径规划,可以将该任务分为三大部分内容。首先需要对输入的图片和起点终点进行处理,其次就是通过A*算法输出规划的路径,最后再对路径进行处理并实现可视化。

其中第一部分需要对输入的地图进行处理,将世界地图转化为栅格地图,如果是彩色地图还需要进行灰度处理并进行二值化处理(判断障碍点),存入相关信息。第二部分A*算法通过代价函数,遍历从起点到终点的路径点并找到f值最小的路径。最后需要将A*算法返回的栅格路径转化为世界地图坐标,再进行可视化。
伪代码:
# 初始化 ROS 节点
初始化 ROS 节点 "astar_planner"
订阅 "/map" 以获取 OccupancyGrid 地图
订阅 "/move_base_simple/goal" 以获取 Rviz 选取的目标点
发布 "/astar_path" 以发布路径
# 处理地图数据
函数 map_callback(msg):
解析地图信息(宽度、高度、分辨率、原点)
转换为二值栅格地图(障碍物=1, 可通行=0)
# 世界坐标 <-> 栅格坐标转换
函数 world_to_map(x, y):
计算栅格坐标并限制范围
函数 map_to_world(map_x, map_y):
计算世界坐标
# 处理选取的目标点
函数 clicked_point_callback(msg):
解析 Rviz 选取的点,转换为栅格坐标
如果没有起点,设置为起点
如果已经有起点,设置终点并运行 A* 规划
调用 publish_path() 发送路径
# A* 算法
函数 astar(grid_map, start, end):
初始化 开放列表 open_list,关闭集合 closed_set
创建起点、终点节点
while open_list 不是空:
取出 f 最小的节点 current_node
如果 current_node == 终点:
回溯生成路径
返回路径
遍历当前节点的四个邻居:
如果邻居是障碍物或已在 closed_set,跳过
计算 g, h, f
如果 f 值比 open_list 中的同位置节点更优,加入 open_list
返回 None(无可行路径)
# 发布路径
函数 publish_path(path):
构建 Path 消息
依次添加路径点,转换回世界坐标
发布 "/astar_path"二、算法实现
A*算法是一种有序的搜索算法,常常用于优化问题求取最短路径。其特点主要在于对估价函数的定义上。A*算法主要通过其估价函数来计算各点之间的代价值,从而找到代价最小的路径即为最优路径。估价函数 f(n)用于评估从起点经过当前节点 nn 到目标节点的总代价,其公式为:
:从起点到当前节点 nn 的实际代价(已知值)。
:从当前节点 nn 到目标节点的启发式估计代价(预测值)。通常情况下利用曼哈顿函数计算。

这里关于A*算法的原理不在赘述。
由于需要存储遍历点的上一节点和对应的f 值,这里可以利用类实现。每个点是Node类的对象,每个点有position(当前点的坐标)、parent(父节点坐标)、g、h、f(代价函数)。

为了方便计算h值,封装曼哈顿函数:

核心算法


三、路径规划实现
首先开启ROS核心

启动map_server加载PGM图像

运行A*算法代码

Rviz实现规划路径可视化
