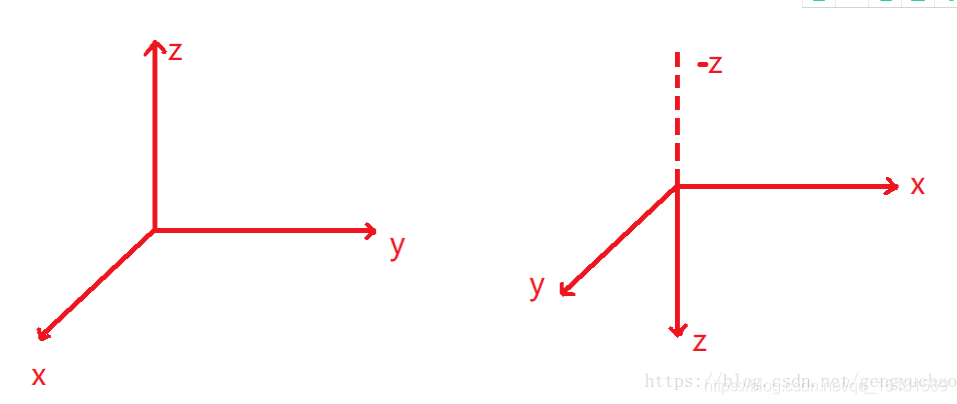
原因是mpu6050装反了,第一次是贴板上面、第二次贴板下面了。就是下图:
需要修改矩阵方向:
原来是:
static signed char gyro_orientation[9] = { 1, 0, 0,
0, 1, 0, //正常设置
0, 0, 1 };
需要改为:
static signed char gyro_orientation[9] = { 0, 1, 0,
1, 0, 0, //颠倒设置
0, 0, -1 };
