一.代码
不多说废话了,加了teach指令,运行了看一下就行。
clear;
clc;
%PUMA560模型
% theta d a alpha offset
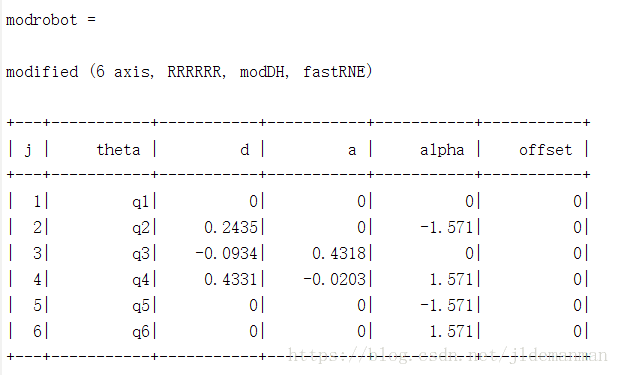
ML1=Link([0 0 0 0 0 ],'modified');
ML2=Link([0 0.2435 0 -pi/2 0 ],'modified');
ML3=Link([0 -0.0934 0.4318 0 0 ],'modified');
ML4=Link([0 0.4331 -0.0203 pi/2 0 ],'modified');
ML5=Link([0 0 0 -pi/2 0 ],'modified');
ML6=Link([0 0 0 pi/2 0 ],'modified');
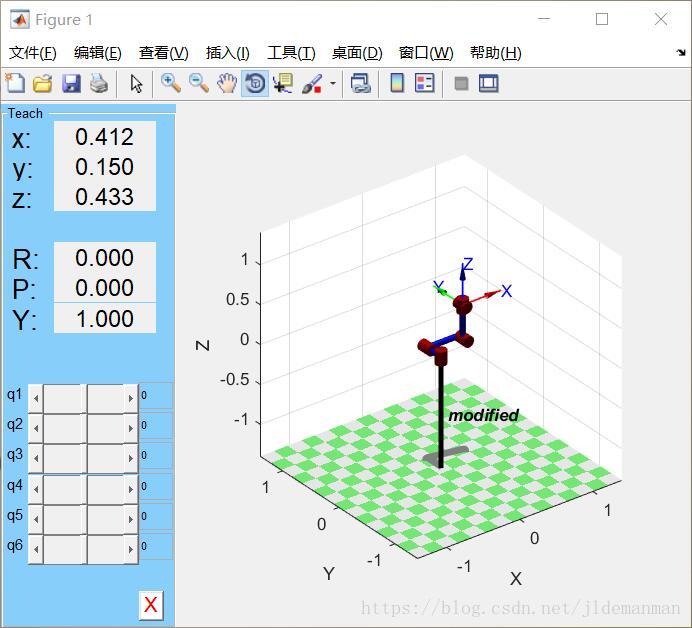
modrobot=SerialLink([ML1 ML2 ML3 ML4 ML5 ML6],'name','modified');
figure(1),teach(modrobot);
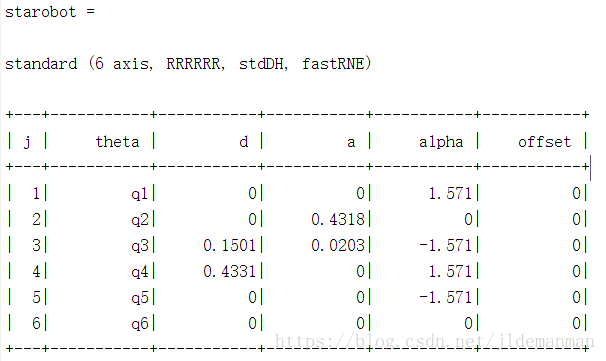
SL1=Link([0 0 0 pi/2 0 ],'standard');
SL2=Link([0 0 0.4318 0 0 ],'standard');
SL3=Link([0 0.1501 0.0203 -pi/2 0 ],'standard');
SL4=Link([0 0.4331 0 pi/2 0 ],'standard');
SL5=Link([0 0 0 -pi/2 0 ],'standard');
SL6=Link([0 0 0 0 0 ],'standard');
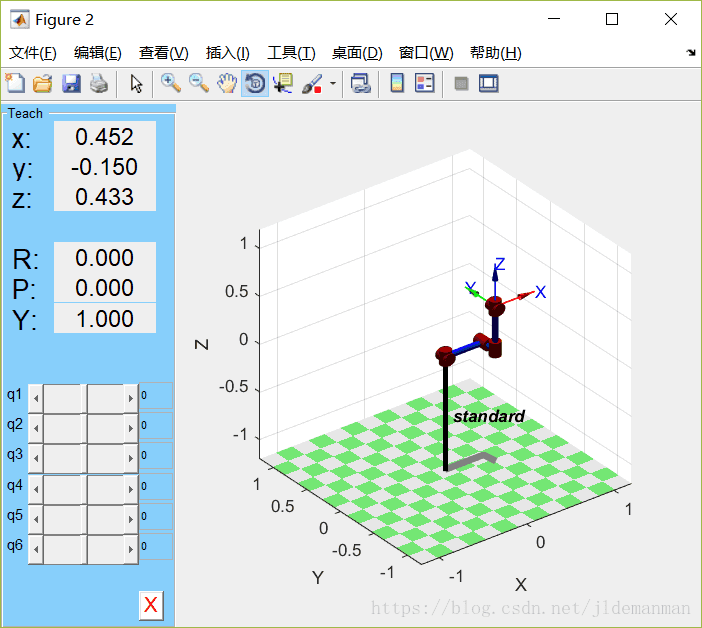
starobot=SerialLink([SL1 SL2 SL3 SL4 SL5 SL6],'name','standard');
figure(2),teach(starobot);二.运行结果