
STM32 通用定时器 Systick原理讲解和源码分享
一、Systick定时器
1、定时器概念
定时器:是芯片内部用于计数从而得到时长的一种外设。
定时器定时长短与什么有关???(定时器定时长短与频率及计数大小有关)
定时器频率换算单位:1GHZ=1000MHZ=1000 000KHZ = 1000 000 000HZ
定时器定时时间:
计数个数/f(频率)

500/1MHZ = 500/1000 000 = 0.0005s = 0.5ms = 500us
在1MHZ下,1us计1个数;在100MHZ下,1us计100个数;
2、Systick定时器
Systick定时器,是一个简单的定时器,对于CM3,CM4内核芯片,都有Systick定时器。常用来做延时,或者实时系统的心跳时钟。这样可以节省MCU资源,不用浪费一个定时器。比如uCOS/FreeRTOS中,分时复用,需要一个最小的时间戳,一般在STM32+UCOS系统中,都采用Systick做uCOS心跳时钟。
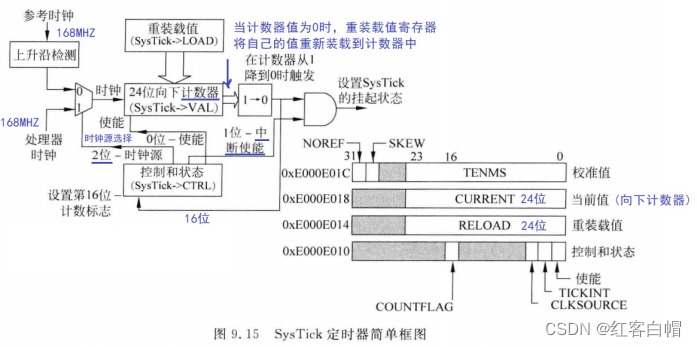
Systick定时器就是系统滴答定时器,
一个24 位的倒计数定时器,计到0 时,将从RELOAD 寄存器中自动重装载定时初值。只要不把它在SysTick 控制及状态寄存器中的使能位清除,就永不停息,即使在睡眠模式下也能工作。
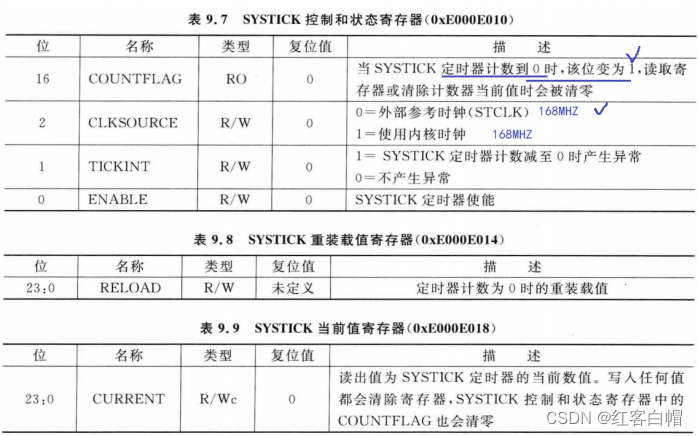
一共4个Systick寄存器
`
CTRL SysTick 控制和状态寄存器
LOAD SysTick 自动重装载除值寄存器
VAL SysTick 当前值寄存器
CALIB SysTick 校准值寄存器
`
二、STM32通用定时器
1、定时分类及时钟频率
STM32定时器分类:高级控制定时器、通用定时器、基本定时器
高级控制定时器:TIM1 TIM8
通用定时器:TIM2 TIM3 TIM4 TIM5 TIM9 TIM10 TIM11 TIM12 TIM13 TIM14
基本定时器:TIM6 TIM7
挂在APB1下的定时器:TIM2 TIM3 TIM4 TIM5 TIM6 TIM7 TIM12 TIM13 TIM14
挂在APB2下的定时器:TIM1 TIM8 TIM9 TIM10 TIM11
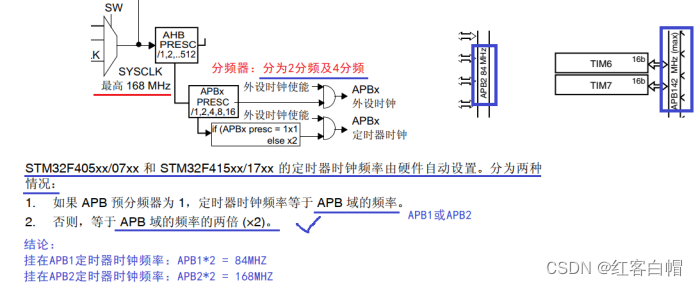
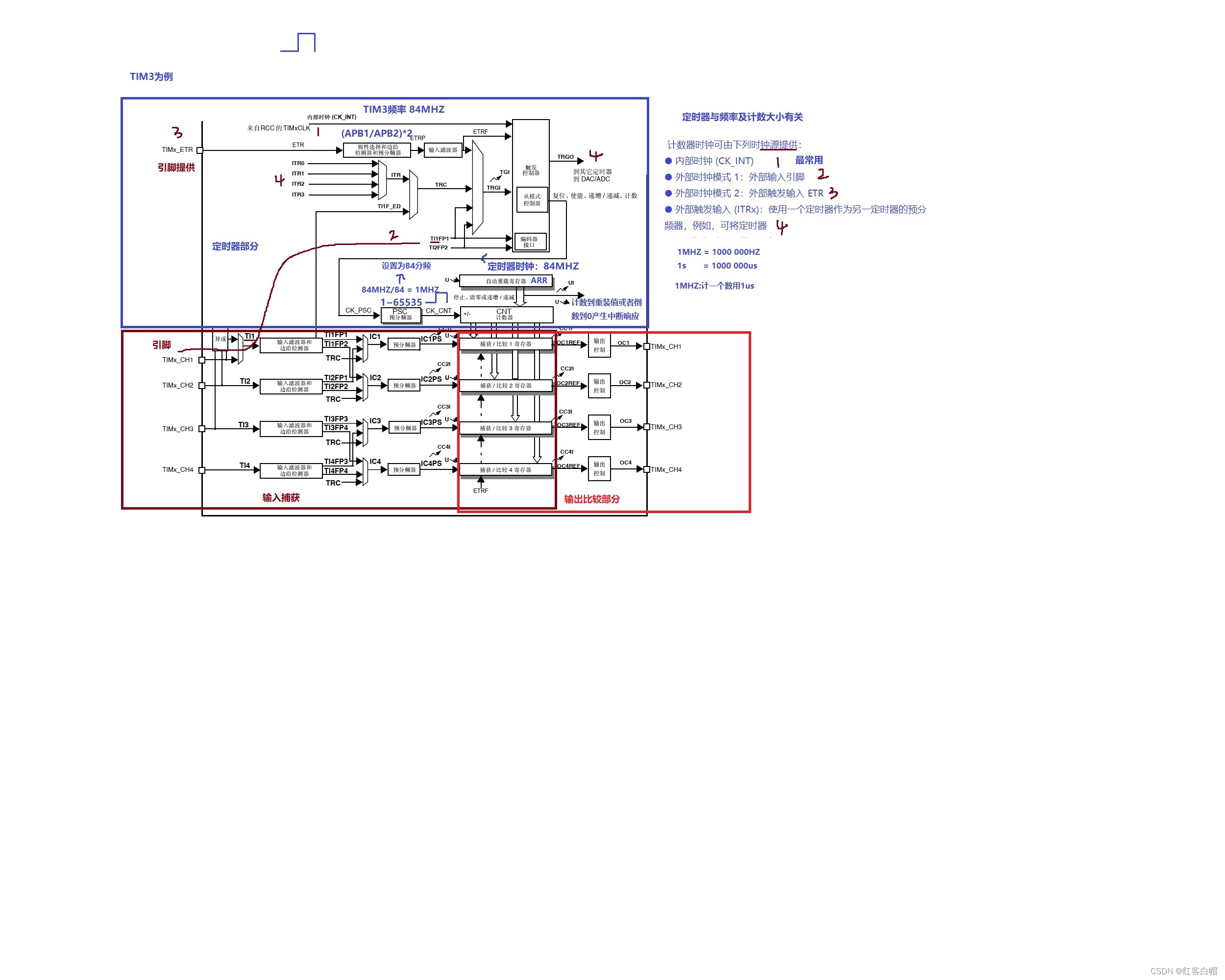
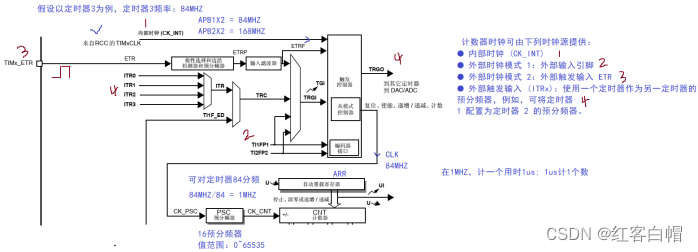
挂在APB1下的定时器时钟频率:42MHZ X 2 = 84MHZ
挂在APB2下的定时器时钟频率:84MHZ X 2 = 168MHZ
2、通用定时器的计数模式
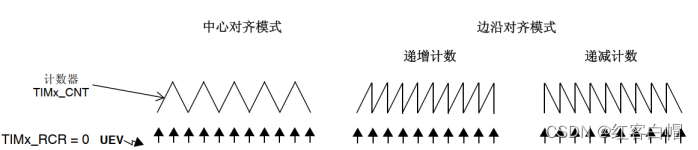
通用定时器可以向上计数、向下计数、向上向下双向计数模式。
①向上计数模式:计数器从0计数到自动加载值(TIMx_ARR),然后重新从0开始计数并且产生一个计数器溢出事件。
②向下计数模式:计数器从自动装入的值(TIMx_ARR)开始向下计数到0,然后从自动装入的值重新开始,并产生一个计数器向下溢出事件。
③中央对齐模式(向上/向下计数):计数器从0开始计数到自动装入的值-1,产生一个计数器溢出事件,然后向下计数到1并且产生一个计数器溢出事件;然后再从0开始重新计数。
3、定时器框架分析
4、通用定时器3配置流程
通用定时器需要添加的库函数文件:stm32f4xx_tim.c
1、能定时器时钟。
RCC_APB1PeriphClockCmd();
2、初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit();
3、启定时器中断,配置NVIC。
NVIC_Init();
4、设置 TIM3_DIER 允许更新中断
TIM_ITConfig();
5、使能定时器。
TIM_Cmd();
6、编写中断服务函数。
TIMx_IRQHandler();
三、函数说明
/**
* @brief Configures the SysTick clock source.
* @param SysTick_CLKSource: specifies the SysTick clock source.
* This parameter can be one of the following values:
* @arg SysTick_CLKSource_HCLK_Div8: AHB clock divided by 8 selected as SysTick clock source.
* @arg SysTick_CLKSource_HCLK: AHB clock selected as SysTick clock source.
* @retval None
*/
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource)
函数说明:SysTick时钟源配置
返回值:无
uint32_t SysTick_CLKSource:时钟源
SysTick_CLKSource_HCLK_Div8: HCLK/8 = 21MHZ
SysTick_CLKSource_HCLK: HCLK = 168MHZ
void TIM_TimeBaseInit(TIM_TypeDef* TIMx, TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct);
函数功能:定时器初始化
返回值:无
TIM_TypeDef* TIMx:选择定时器
TIM_TimeBaseInitTypeDef* TIM_TimeBaseInitStruct:定时器结构体
typedef struct
{
uint16_t TIM_Prescaler;
uint16_t TIM_CounterMode;
uint16_t TIM_Period;
uint16_t TIM_ClockDivision;
} TIM_TimeBaseInitTypeDef;
1. 第一个参数 TIM_Prescaler 是用来设置分频系数。
2. 第二个参数 TIM_CounterMode 是用来设置计数方式,上面讲解过,可以设置为向上计数,向下计数方式还有中央对齐计数方式,比较常用的是向上计数模式TIM_CounterMode_Up 和向
下计数模式 TIM_CounterMode_Down。
3. 第三个参数是设置自动重载计数周期值,这在前面也已经讲解过。
4. 第四个参数是用来设置时钟分频因子
void TIM_ITConfig(TIM_TypeDef* TIMx, uint16_t TIM_IT, FunctionalState NewState)
函数说明:定时器的中断配置
返回值:无
TIM_TypeDef* TIMx:选择哪个定时器
uint16_t TIM_IT:中断方式
TIM_IT_Update (更新中断)
TIM_IT_CC1
TIM_IT_CC2
TIM_IT_CC3
TIM_IT_CC4
TIM_IT_COM
TIM_IT_Trigger
TIM_IT_Break
FunctionalState NewState:是否使能
void TIM_Cmd(TIM_TypeDef* TIMx, FunctionalState NewState)
函数说明:定时器使能
返回值:无
TIM_TypeDef* TIMx:选择哪个定时器
FunctionalState NewState:是否使能
ITStatus TIM_GetITStatus(TIM_TypeDef* TIMx, uint16_t TIM_IT)
函数功能:获取定时器中断标志位
返回值:SET或RESET
TIM_TypeDef* TIMx:选择定时器
uint16_t TIM_IT:中断事件
* @arg TIM_IT_Update: TIM update Interrupt source(更新标志位)
* @arg TIM_IT_CC1: TIM Capture Compare 1 Interrupt source
* @arg TIM_IT_CC2: TIM Capture Compare 2 Interrupt source
* @arg TIM_IT_CC3: TIM Capture Compare 3 Interrupt source
* @arg TIM_IT_CC4: TIM Capture Compare 4 Interrupt source
* @arg TIM_IT_COM: TIM Commutation Interrupt source
* @arg TIM_IT_Trigger: TIM Trigger Interrupt source
* @arg TIM_IT_Break: TIM Break Interrupt source
void TIM_ClearITPendingBit(TIM_TypeDef* TIMx, uint16_t TIM_IT)
函数功能:清空定时器中断标志位
返回值:无
TIM_TypeDef* TIMx:选择定时器
uint16_t TIM_IT:中断事件
* @arg TIM_IT_Update: TIM update Interrupt source
* @arg TIM_IT_CC1: TIM Capture Compare 1 Interrupt source
* @arg TIM_IT_CC2: TIM Capture Compare 2 Interrupt source
* @arg TIM_IT_CC3: TIM Capture Compare 3 Interrupt source
* @arg TIM_IT_CC4: TIM Capture Compare 4 Interrupt source
* @arg TIM_IT_COM: TIM Commutation Interrupt source
* @arg TIM_IT_Trigger: TIM Trigger Interrupt source
* @arg TIM_IT_Break: TIM Break Interrupt source
四、定时器应用
智能公交一体机,定时器每隔固定时间向服务器发送自己的定位

交通红绿灯定时1S将数字进行倒数
五、源码分享 定时器TIM3
阅读源码,请从主函数依次观看其他函数的调用顺序,即可理清整个逻辑
ctrl+Home 快速定位到开头
ctrl+End 快速定位到结尾
文章内容繁多,请善用目录进行检索
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "stm32f4xx.h"
void Delay_Init(void);
void delay_us(u32 nus);
void delay_ms(u32 nms);
#endif
delay.c
#include "delay.h"
//u32 == unsigned int
u32 my_us = 21; //计21个数用1us
u32 my_ms = 21000; //计21000个数用1ms
void Delay_Init(void)
{
//SysTick时钟配置 168MHZ/8 = 21MHZ
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
}
//nus取值范围:1~798 915
void delay_us(u32 nus)
{
u32 temp = 0;
//设置重装值寄存器
SysTick->LOAD = my_us*nus - 1;
//设置计数器的值为0
SysTick->VAL = 0x00;
//开启定时器
SysTick->CTRL |= (0x01<<0);
do
{
temp = SysTick->CTRL;
//判断定时是否关闭 //判断SysTick->CTRL第16位是否为1
}while((temp&(0x01<<0)) && (!(temp & (0x01<<16))));
//关闭定时器
SysTick->CTRL &= ~(0x01<<0);
}
//nms取值范围:1~798
void delay_ms(u32 nms)
{
u32 temp = 0;
//设置重装值寄存器
SysTick->LOAD = my_ms*nms - 1;
//设置计数器的值为0
SysTick->VAL = 0x00;
//开启定时器
SysTick->CTRL |= (0x01<<0);
do
{
temp = SysTick->CTRL;
//判断定时是否关闭 //判断SysTick->CTRL第16位是否为1
}while((temp&(0x01<<0)) && (!(temp & (0x01<<16))));
//关闭定时器
SysTick->CTRL &= ~(0x01<<0);
}
void delay_s(u32 ns)
{
int i;
for(i=0; i<ns; i++)
{
delay_ms(500);
delay_ms(500);
}
}
exti.h
#ifndef __EXTI_H
#define __EXTI_H
#include "stm32f4xx.h"
void Exti_PA0_Init(void);
#endif
exti.c
#include "exti.h"
/*********************************
引脚说明:
KEY0--PA0(选择下降沿触发)
**********************************/
void Exti_PA0_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//使能SYSCFG及GPIOA时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
//使能GPIOA组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//初始化IO口为输入。
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //引脚0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStruct);
//设置IO口与中断线的映射关系。
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
EXTI_InitStruct.EXTI_Line = EXTI_Line0; //中断线0
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; //中断模式
EXTI_InitStruct.EXTI_Trigger= EXTI_Trigger_Falling; //下降触发
EXTI_InitStruct.EXTI_LineCmd= ENABLE; //中断使能
//初始化线上中断,设置触发条件等。
EXTI_Init(&EXTI_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; //中断通道,可在stm32f4xx.h文件当中查找
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //通道使能
//配置中断分组(NVIC),并使能中断。
NVIC_Init(&NVIC_InitStruct);
}
void delays(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
/***************************************************************
1、中断服务函数是满足条件后,CPU自行执行的函数不需要主动调用
2、中断服务函数是不能传递值与返回值
3、STM32的中断服务函数名可在startup_stm32f40_41xxx.s中查找
****************************************************************/
//编写中断服务函数
void EXTI0_IRQHandler(void)
{
//判断标志位是否1
if(EXTI_GetITStatus(EXTI_Line0) == SET)
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_RESET)
{
//延时一段时间
delays(15);
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_RESET)
{
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
}
}
}
//清空中断线0
EXTI_ClearITPendingBit(EXTI_Line0);
}
key.h
#ifndef __KEY_H
#define __KEY_H
#include "stm32f4xx.h"
void Key_Init(void);
#endif
key.c
#include "key.h"
/*********************************
引脚说明:
KEY0--PA0
**********************************/
void Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能GPIOA组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //引脚0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
led.h
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
#define LED0_ON GPIO_ResetBits(GPIOF, GPIO_Pin_9)
#define LED0_OFF GPIO_SetBits(GPIOF, GPIO_Pin_9)
void Led_Init(void);
#endif
led.c
#include "led.h"
/*********************************
引脚说明:
LED0 -- PF9
LED1 -- PF10
LED2 -- PE13
LED3 -- PE14
**********************************/
void Led_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能GPIOE组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
//使能GPIOF组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10; //引脚9 10
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_Init(GPIOF, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14; //引脚13 14
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_SetBits(GPIOF, GPIO_Pin_9);
GPIO_SetBits(GPIOF, GPIO_Pin_10);
GPIO_SetBits(GPIOE, GPIO_Pin_13);
GPIO_SetBits(GPIOE, GPIO_Pin_14);
}
tim.h
#ifndef __TIM_H
#define __TIM_H
#include "stm32f4xx.h"
void Tim3_Init(void);
#endif
tim.c
#include "tim.h"
/*********************************
定时器说明
TIM3 -- APB1(定时器频率:84MHZ)
TIM3是16位定时器
**********************************/
void Tim3_Init(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//1、能定时器时钟。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
// TIM_TimeBaseInitStruct.TIM_Prescaler = (84-1); //84分频,定时器频率84MHZ/84 = 1MHZ(计一个用1us)
// TIM_TimeBaseInitStruct.TIM_Period = (1000-1); //计1000个数,在1MHZ下,用时1ms
// TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
// TIM_TimeBaseInitStruct.TIM_ClockDivision= TIM_CKD_DIV1; //分频因子 1脉冲计一个数
// //2、初始化定时器,配置ARR,PSC。
// TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
TIM_TimeBaseInitStruct.TIM_Prescaler = (8400-1); //8400分频,定时器频率84MHZ/8400 = 10000HZ(1秒可计10000个数)
TIM_TimeBaseInitStruct.TIM_Period = (10000-1); //计10000个数,在10000HZ下,用时1s
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInitStruct.TIM_ClockDivision= TIM_CKD_DIV1; //分频因子 1脉冲计一个数
//2、初始化定时器,配置ARR,PSC。
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStruct);
NVIC_InitStruct.NVIC_IRQChannel = TIM3_IRQn; //中断通道,可在stm32f4xx.h文件当中查找
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //通道使能
//3、启定时器中断,配置NVIC。
NVIC_Init(&NVIC_InitStruct);
//4、设置 TIM3_DIER 允许更新中断
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE);
//5、使能定时器。
TIM_Cmd(TIM3, ENABLE);
}
//编写中断服务函数。
void TIM3_IRQHandler(void)
{
static int number = 0;
//判断更新标志位是否1
if(TIM_GetITStatus(TIM3, TIM_IT_Update) == SET)
{
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
//清空更新标志位
TIM_ClearITPendingBit(TIM3, TIM_IT_Update);
}
}
main.c
#include "stm32f4xx.h"
#include "led.h"
#include "key.h"
#include "exti.h"
#include "delay.h"
#include "tim.h"
void delay(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
int main(void)
{
//NVIC 中断分组 一个项目一般只有一个分组:0~3
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
Led_Init();
Tim3_Init();
while(1)
{
GPIO_ToggleBits(GPIOE, GPIO_Pin_14);
//1S
delay_ms(500);
delay_ms(500);
}
return 0;
}
六、 延时函数delay延时
delay.h
#ifndef __DELAY_H
#define __DELAY_H
#include "stm32f4xx.h"
void Delay_Init(void);
void delay_us(u32 nus);
void delay_ms(u32 nms);
#endif
delay.c
#include "delay.h"
//u32 == unsigned int
u32 my_us = 21; //计21个数用1us
u32 my_ms = 21000; //计21000个数用1ms
void Delay_Init(void)
{
//SysTick时钟配置 168MHZ/8 = 21MHZ
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
}
//nus取值范围:1~798 915
void delay_us(u32 nus) //500
{
u32 temp = 0;
//设置重装值寄存器
SysTick->LOAD = my_us*nus - 1; //500*21 -1
//设置计数器的值为0
SysTick->VAL = 0x00;
//开启定时器
SysTick->CTRL |= (0x01<<0);
do
{
temp = SysTick->CTRL;
//判断定时是否关闭 //判断SysTick->CTRL第16位是否为1
}while((temp&(0x01<<0)) && (!(temp & (0x01<<16))));
//关闭定时器
SysTick->CTRL &= ~(0x01<<0);
}
//nms取值范围:1~798
void delay_ms(u32 nms)
{
u32 temp = 0;
//设置重装值寄存器
SysTick->LOAD = my_ms*nms - 1;
//设置计数器的值为0
SysTick->VAL = 0x00;
//开启定时器
SysTick->CTRL |= (0x01<<0);
do
{
temp = SysTick->CTRL;
//判断定时是否关闭 //判断SysTick->CTRL第16位是否为1
}while((temp&(0x01<<0)) && (!(temp & (0x01<<16))));
//关闭定时器
SysTick->CTRL &= ~(0x01<<0);
}
void delay_s(u32 ns)
{
int i;
for(i=0; i<ns; i++)
{
delay_ms(500);
delay_ms(500);
}
}
exti.h
#ifndef __EXTI_H
#define __EXTI_H
#include "stm32f4xx.h"
void Exti_PA0_Init(void);
#endif
exti.c
#include "exti.h"
/*********************************
引脚说明:
KEY0--PA0(选择下降沿触发)
**********************************/
void Exti_PA0_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
EXTI_InitTypeDef EXTI_InitStruct;
NVIC_InitTypeDef NVIC_InitStruct;
//使能SYSCFG及GPIOA时钟:
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
//使能GPIOA组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
//初始化IO口为输入。
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //引脚0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStruct);
//设置IO口与中断线的映射关系。
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
EXTI_InitStruct.EXTI_Line = EXTI_Line0; //中断线0
EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt; //中断模式
EXTI_InitStruct.EXTI_Trigger= EXTI_Trigger_Falling; //下降触发
EXTI_InitStruct.EXTI_LineCmd= ENABLE; //中断使能
//初始化线上中断,设置触发条件等。
EXTI_Init(&EXTI_InitStruct);
NVIC_InitStruct.NVIC_IRQChannel = EXTI0_IRQn; //中断通道,可在stm32f4xx.h文件当中查找
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1; //抢占优先级
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //通道使能
//配置中断分组(NVIC),并使能中断。
NVIC_Init(&NVIC_InitStruct);
}
void delays(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
/***************************************************************
1、中断服务函数是满足条件后,CPU自行执行的函数不需要主动调用
2、中断服务函数是不能传递值与返回值
3、STM32的中断服务函数名可在startup_stm32f40_41xxx.s中查找
****************************************************************/
//编写中断服务函数
void EXTI0_IRQHandler(void)
{
//判断标志位是否1
if(EXTI_GetITStatus(EXTI_Line0) == SET)
{
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_RESET)
{
//延时一段时间
delays(15);
if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_RESET)
{
GPIO_ToggleBits(GPIOF, GPIO_Pin_9);
}
}
}
//清空中断线0
EXTI_ClearITPendingBit(EXTI_Line0);
}
key.h
#ifndef __KEY_H
#define __KEY_H
#include "stm32f4xx.h"
void Key_Init(void);
#endif
key.c
#include "key.h"
/*********************************
引脚说明:
KEY0--PA0
**********************************/
void Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能GPIOA组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; //引脚0
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN; //输入模式
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA, &GPIO_InitStruct);
}
led.h
#ifndef __LED_H
#define __LED_H
#include "stm32f4xx.h"
#define LED0_ON GPIO_ResetBits(GPIOF, GPIO_Pin_9)
#define LED0_OFF GPIO_SetBits(GPIOF, GPIO_Pin_9)
void Led_Init(void);
#endif
led.c
#include "led.h"
/*********************************
引脚说明:
LED0 -- PF9
LED1 -- PF10
LED2 -- PE13
LED3 -- PE14
**********************************/
void Led_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
//使能GPIOE组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);
//使能GPIOF组时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10; //引脚9 10
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_Init(GPIOF, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13|GPIO_Pin_14; //引脚13 14
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //输出模式
GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; //速度
GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_SetBits(GPIOF, GPIO_Pin_9);
GPIO_SetBits(GPIOF, GPIO_Pin_10);
GPIO_SetBits(GPIOE, GPIO_Pin_13);
GPIO_SetBits(GPIOE, GPIO_Pin_14);
}
main.c
#include "stm32f4xx.h"
#include "led.h"
#include "key.h"
#include "exti.h"
#include "delay.h"
void delay(int n)
{
int i,j;
for(i=0; i<n; i++)
for(j=0; j<30000; j++);
}
int main(void)
{
//NVIC分组一个工程只能设置一次
//设置NVIC分组为第二分组; 抢占优先级取值范围:0~3, 响应优先级取值范围:0~3
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
Led_Init();
while(1)
{
GPIO_ToggleBits(GPIOF, GPIO_Pin_9); //改变灯的状态
//延时1s
delay_ms(500); //500+500 = 1000ms =1s
delay_ms(500);
}
return 0;
}
