喜提国庆8天工作乐,改代码真的很帅,才华皆一切,这篇博客的由来是因为我做实验了,然后摄像头的有效距离贼差,打了技术人员的电话说他们的有效距离4m,然后边缘相差为百分之2,简直离谱,我的设备有效距离大约1m,中间有时候都不准,别说边缘了,所以calibration一下看看。
1. 下载Viewer工具
官网下载地址:Intel RealSense SDK 2.0 – Intel RealSense Depth and Tracking cameras
我的百度网盘:链接:https://pan.baidu.com/s/1QXYS3UPEQCtUkuH_6G60PA 提取码:s1h1
2. 打开Intel RealSense Viewer,连接设备(例:D435i)

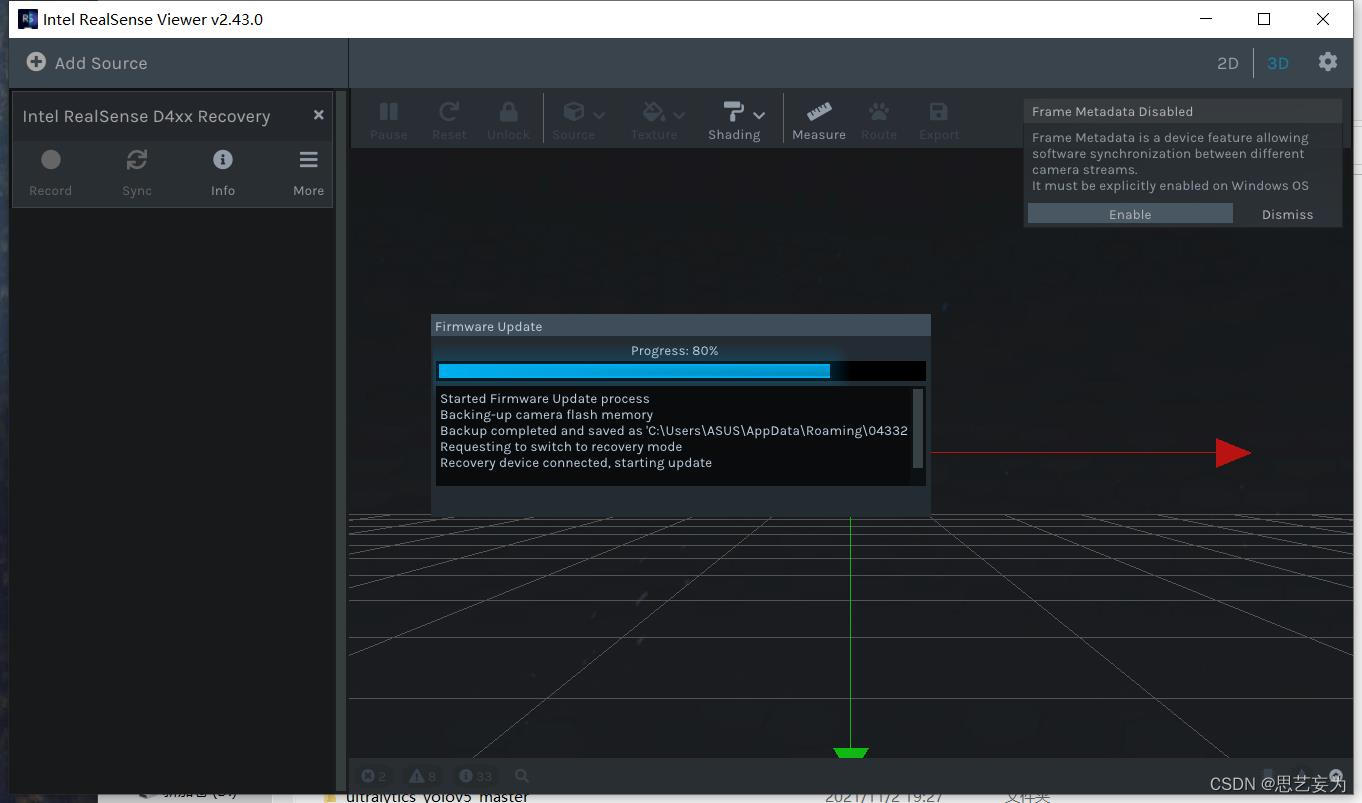
3. 首先点击“More”-“Install Recommended Firmware” ,安装推荐的固件版本,等待固件刷入
4. Self-Calibration的场景一般可分为三种
4.1 大白墙
找寻一面平整的大白墙,固定相机,点击“More”-“On-Chip Calibration” ,右侧出现的弹窗中,在Speed速度中选择:fast,然后就选内参(Intrinsic)和外参(Extrinsic),挨个调就行。

右侧出现的弹窗中,能够看到两项数值Health-Check和FL Health-Check

当HC<0.25,FL HC<0.15,保留原有校准数据,点击“Dismiss”忽略。
当HC>0.25,FL HC>0.15,改善原有校准数据,即点击“Apply New”应用新的校准数据,并且再运行一次On-Chip Calibration ,继续观察两项数值,直至它们分别低于0.25和0.15,
若HC或FL HC>0.75,原有校准数据必须要进行改善,并且建议直接使用动态校准或OEM校准
4.2 任意环境下(注意有效深度覆盖50%以上)

重复上述操作,在Speed速度选择上,如Depth质量下降明显时,建议选择“Slow”,如做Depth常规改善,可以选择“Fast”,调到两个参数都在Good范围内就行。
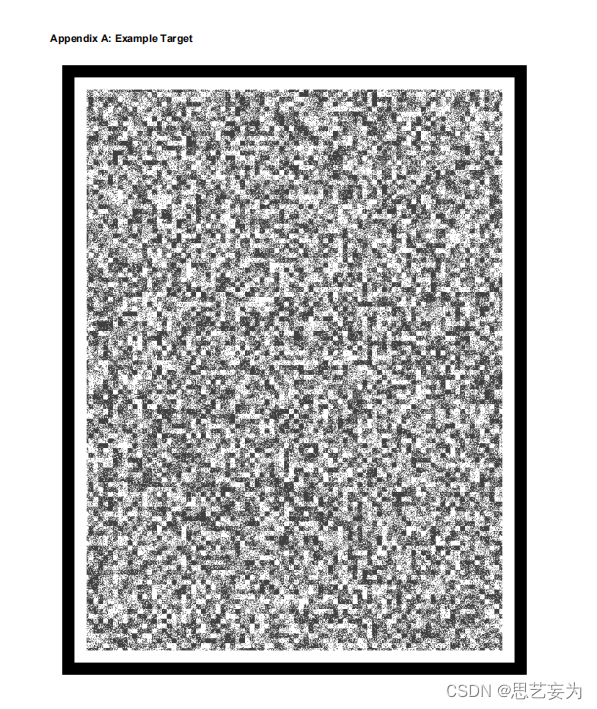
4.3 理想场景:一个带纹理的平面目标
打印校准纹理目标纸,将目标纸固定于墙上,对准,重复操作,在Speed速度选择中,如深度质量下降明显时,建议选择“Slow”,如做深度(质量)常规改善,可以选择“Fast”。
5. 完结撒花
完成之后就再做一遍实验,看有没有改善,我觉得2m最多了,那个技术人员说4m,说边缘误差百分之2,我觉得是胡扯,我的设备的是D435和D435i,超过1500mm狂跳,如果有谁的设备真的这么给力,麻烦后台私信我,让我开开眼界!