3D-2D估计
输入:3d空间点 2d像素点,输出:相机的位姿
此时相机位姿估计已知一张图片含有3D信息,另一个只有2D信息,此问题采取特征点法估计若干图像中的相机运动。思路为先从图像中提取若干特征,然后在3D-2D图像间进行特征匹配,这样就得到许多匹配好的点,再根据这些点进行相机位姿的求解,即求解相机相对于世界坐标系的姿态改变量R,t。其旋转矩阵设为R,平移向量设为t。
3D-2D估计本质是pespective-n-point(PnP)一个问题,即给定世界坐标系中n个3D点及其在图像中的相应2D投影的情况下,估计校准相机的姿势的问题。相机姿势由6个自由度(DOF)组成,其由旋转(滚动,俯仰和偏航)以及相机相对于世界的3D平移构成。该问题源于相机校准,并且在计算机视觉和其他领域中具有许多应用,包括3D姿态估计、机器人和增强现实。 对于n = 3,存在一个常用的问题解决方案,称为P3P,并且许多解决方案适用于n≥3的一般情况。即PNP问题
求解方法:
(1)直接线性变换DLT:
最少通过6对匹配点实现矩阵TT的线性求解,当匹配点多于6对时,可以使用SVDSVD对超定方程求最小二乘解。
(2)3对点估计位姿的P3P:
3D−2D匹配点,3D点是A,B,C(世界坐标系中坐标),2D点是a,b,c(成像平面像素坐标)
P3P只利用3个点的信息,当给定匹配点多余3组时,难以利用更多信息。
如果3D点或者2D点受噪声影响,或者存在误匹配,算法失效。
在SLAM中,通常先使用 P3P/EPnP等方法估计相机位姿,然后构建最小二乘优化问题对估计值进行调整(Bundle Adjustment)。
(3)使用BundleAdjustment优化求解位姿
PNP问题
PNP问题的描述以及定义是相对简单的,他的目的就是求解3D-2D点对运动的方法。简单来说,就是在已知n个三维空间点坐标(相对于某个指定的坐标系A)及其二维投影位置的情况下,如何估计相机的位姿(即相机在坐标系A下的姿态)。举个例子,我们在一幅图像中,知道其中至少四个图像中确定的点在3D空间下的相对坐标位置,我们就可以估计出相机相对于这些点的姿态,或者说估计出这些3D点在相机坐标系下姿态。(上述说的姿态或者位姿,包括位置以及方向,即一个6自由度的状态)即给定世界参考系中的一组n个3D点及其对应的2D图像投影以及校准的固有相机参数,以相对于世界的旋转和平移的形式确定相机的6 DOF位姿。
即PNP方法是为了解决在当前两帧图像中,已知前一帧图像上的3d特征点和当前帧的2d特征点,求取当前帧的pose
PNP问题的可解性
1. 当PNP中N=1时,即只知道一对3D-2D点对的情况下:
当只有一个特征点P1,我们假设它就在图像的正中央,那么显然向量OcP1就是相机坐标系中的Z轴,此时相机永远是面对P1,于是相机可能的位置就是在以P1为球心的球面上,再一个就是球的半径也无法确定,于是有无数个解。
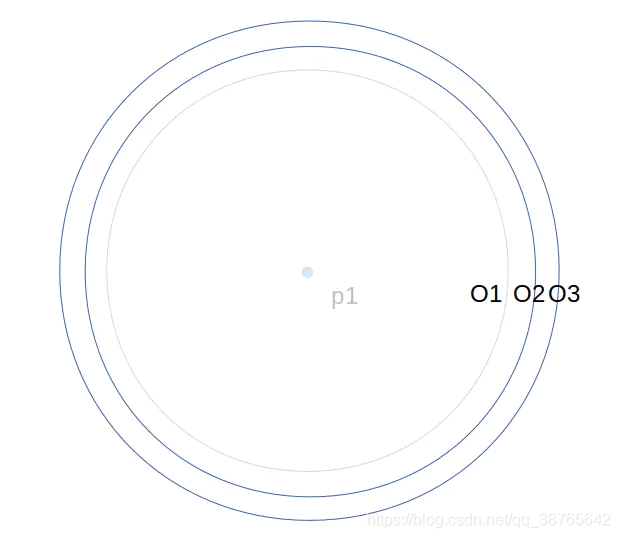
如上图(2D示意图)的示例,Oc有可能在O1球上的任何一点,或者O2或O3球上的任何一点。
2. 当PNP中N=2时,即只知道两对3D-2D点对的情况下:

现在多了一个约束条件,显然OcP1P2形成一个三角形,由于P1、P2两点位置确定,三角形的边P1P2确定,再加上向量OcP1,OcP2,根据小孔模型,从Oc点射线特征点的方向角也能确定,于是能够计算出OcP1的长度=r1,OcP2的长度=r2。于是这种情况下得到两个球:以P1为球心,半径为r1的球A;以P2为球心,半径为r2的球B。显然,相机位于球A,球B的相交处,应该是一个圆圈,依旧是无数个解。
3. 当PNP中N=3时,即只知道三对3D-2D点对的情况下:
与上述相似,这次又多了一个以P3为球心的球C,相机这次位于ABC三个球面的相交处,终于不再是无数个解了,但是这次应该会有4个解,即获得四个旋转矩阵、平移矩阵,其中一个就是我们需要的真解了。
4. 当PNP中N>3时,即知道三对以上3D-2D点对的情况下:
解法:而是先用3个点计算出4组解获得四个旋转矩阵、平移矩阵。根据公式:
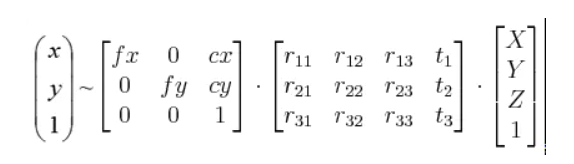
其中(x,y,1)为像素平面上的坐标,(X,Y,Z,1)为世界坐标系在的坐标
将第四个点的世界坐标代入公式,获得其在图像中的四个投影(一个解对应一个投影),取出其中投影误差(与已知的图像上的2D点坐标的误差)最小的那个解,就是我们所需要的正解。
PNP问题求解方法
这里以P3P问题进行解析
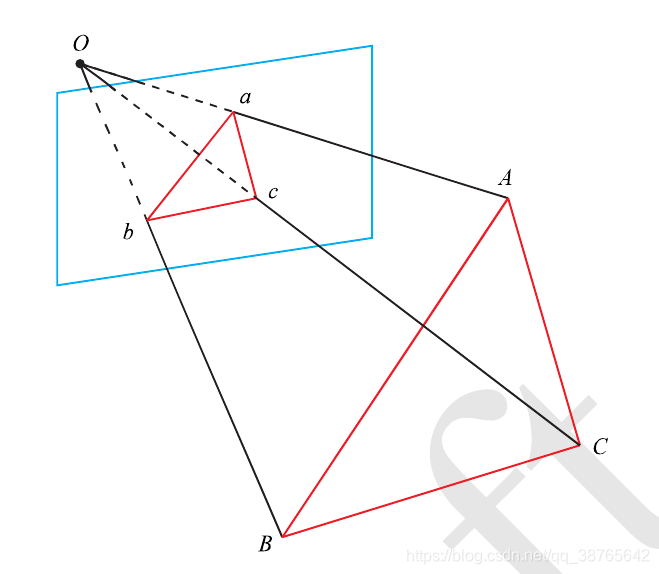
假设空间中有A,B,C三点,投影到成像平面中有a,b,c三点,在PnP问题中,A,B,C在世界坐标系下的坐标是已知的,但是在相机坐标系下的坐标是未知的。a,b,c的坐标是已知的。PnP的目的就是要求解A,B,C在相机坐标系下的坐标值。如下图所示。需要注意的是三角形abc和三角形ABC不一定是平行的。
根据余弦定理有:
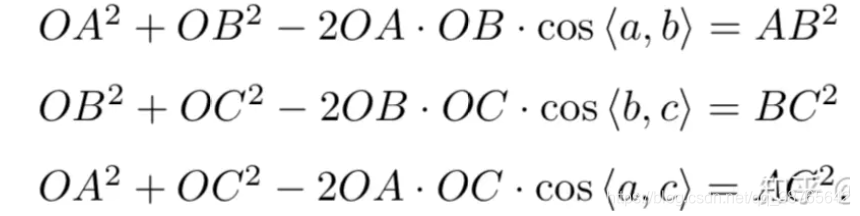
记x=OA/OC,y=OB/OC,因为A,B,C在相机坐标系中的坐标未知,因此x,y是未知的。
另记u=BC2/AB2,w=AC/AB, 根据A,B,C的世界坐标,u,w是可以求出的。
通过一系列的转化可以得到两个等式:

关于P3P的具体求解过程可参考以下笔记:
相机位姿求解——P3P问题 有实现代码
P3P公式推导
相机位姿估计入门
学习笔记之——P3P与ICP位姿估计算法及实验 有最小化重投影误差