什么是PnP问题?
已知量是空间点的真实坐标和图像坐标,未知量(求解量)是相机的位姿。求解相机内外参数。
首先介绍DLT(直接线性变换法)
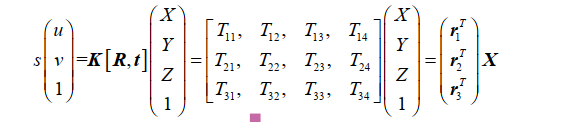
要求的就是T,将T的每一行分别写成r1,r2,r3,经变换得到下式
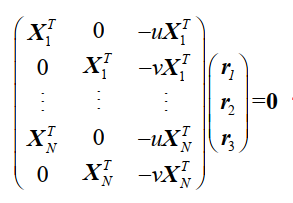
12个未知数,需要6对3D-2D的点。
QR分解,求得KRt
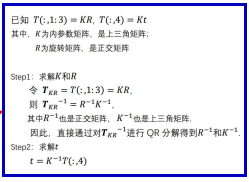
为什么需要QR分解呢?(

还有p3p,epnp,碰到了在看!
什么是PnP问题?
已知量是空间点的真实坐标和图像坐标,未知量(求解量)是相机的位姿。求解相机内外参数。
首先介绍DLT(直接线性变换法)
要求的就是T,将T的每一行分别写成r1,r2,r3,经变换得到下式
12个未知数,需要6对3D-2D的点。
QR分解,求得KRt
为什么需要QR分解呢?(
还有p3p,epnp,碰到了在看!
