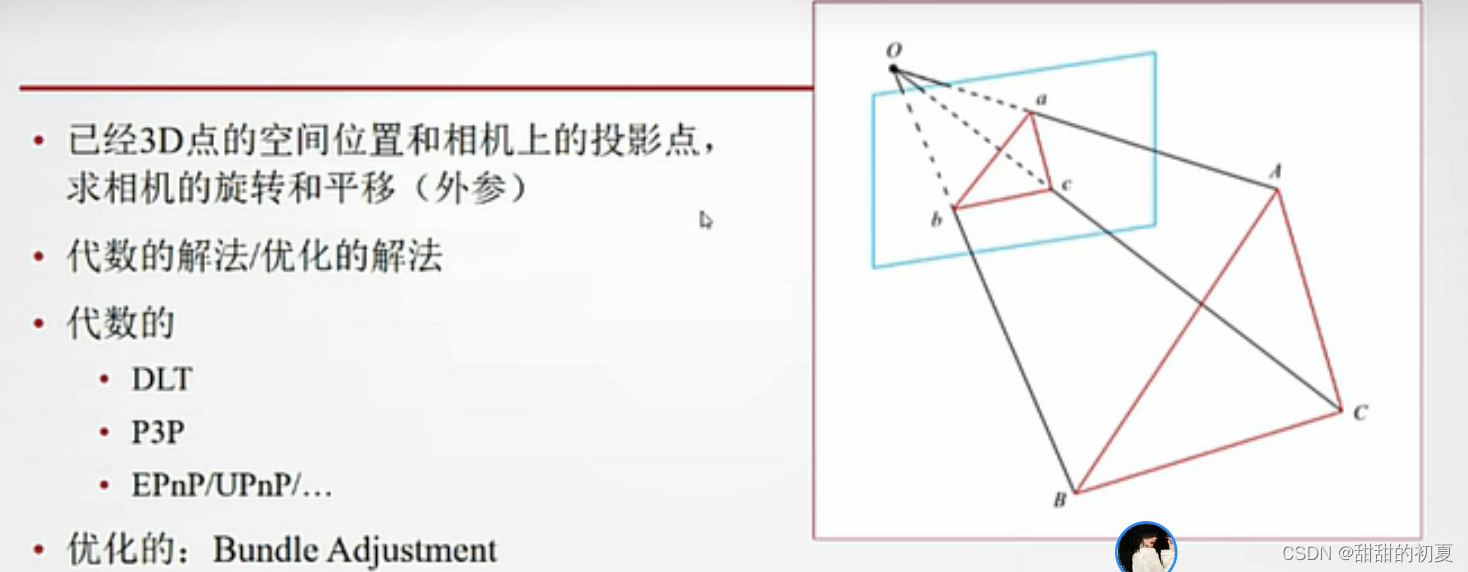
当运动连续的时候,用优化的方法,因为线性代数的方法能解,不过对于噪声不够鲁棒
当对解完全不知道的情况下,可以用代数的方法,如果知道解的大致样子,可以给一个初始值,通过迭代的方式求解。
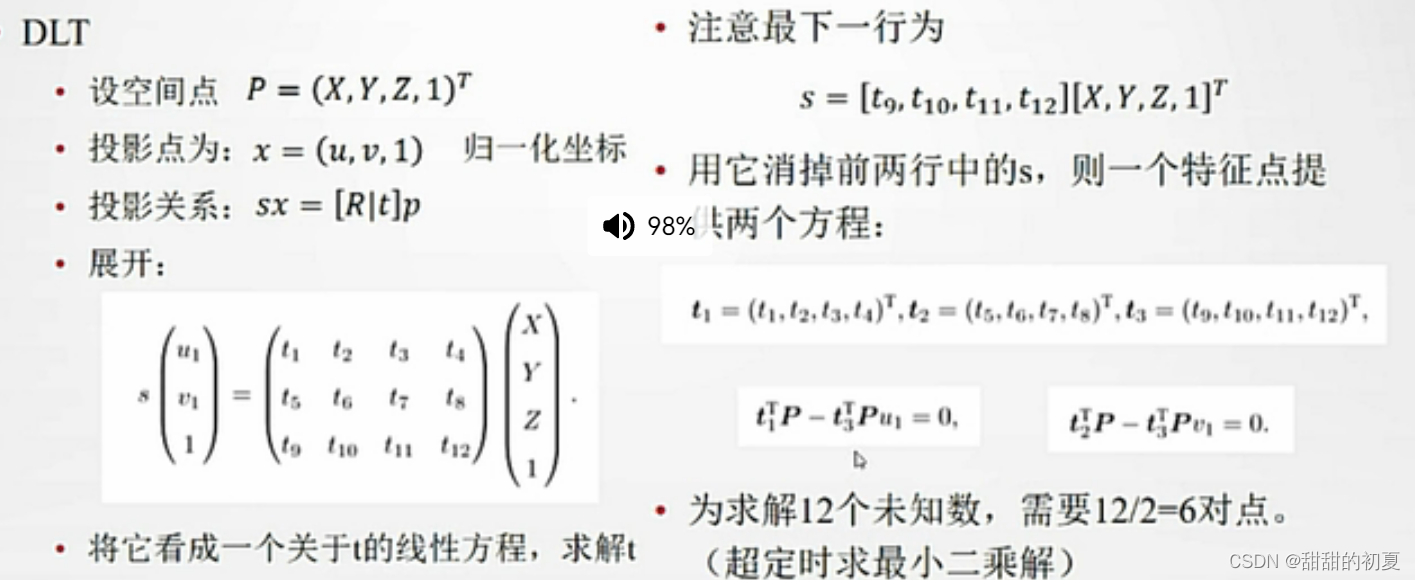
s为距离因子*x=世界坐标到相机坐标的变换
 3D空间三个点ABC,在2D空间(相机上面)的投影abc ,计算相机到世界坐标的旋转和平移
3D空间三个点ABC,在2D空间(相机上面)的投影abc ,计算相机到世界坐标的旋转和平移
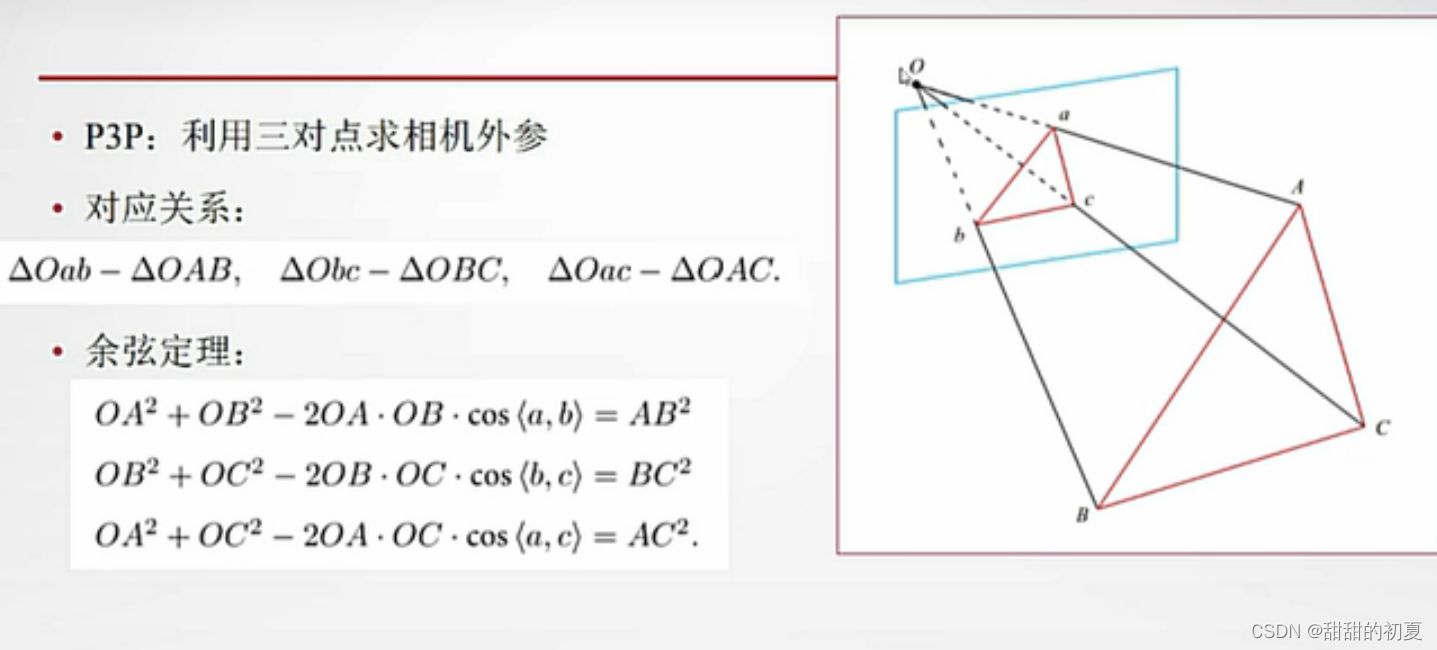
已知ABC在世界坐标系下的点坐标,abc在相机坐标系下的坐标,不知道ABC在相机坐标系下的点坐标
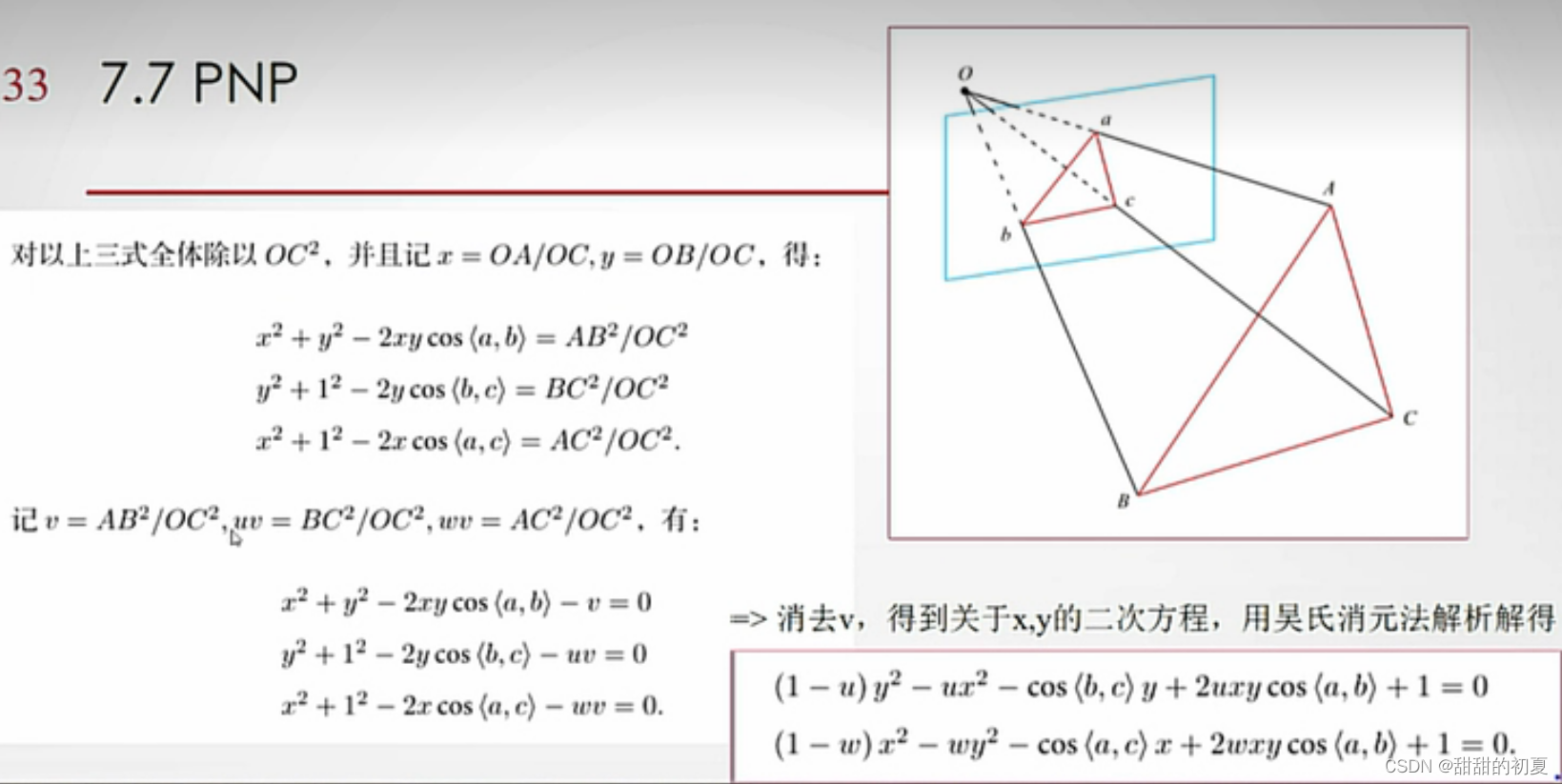
u=BC^2/AB^2,和w已知,v不知道
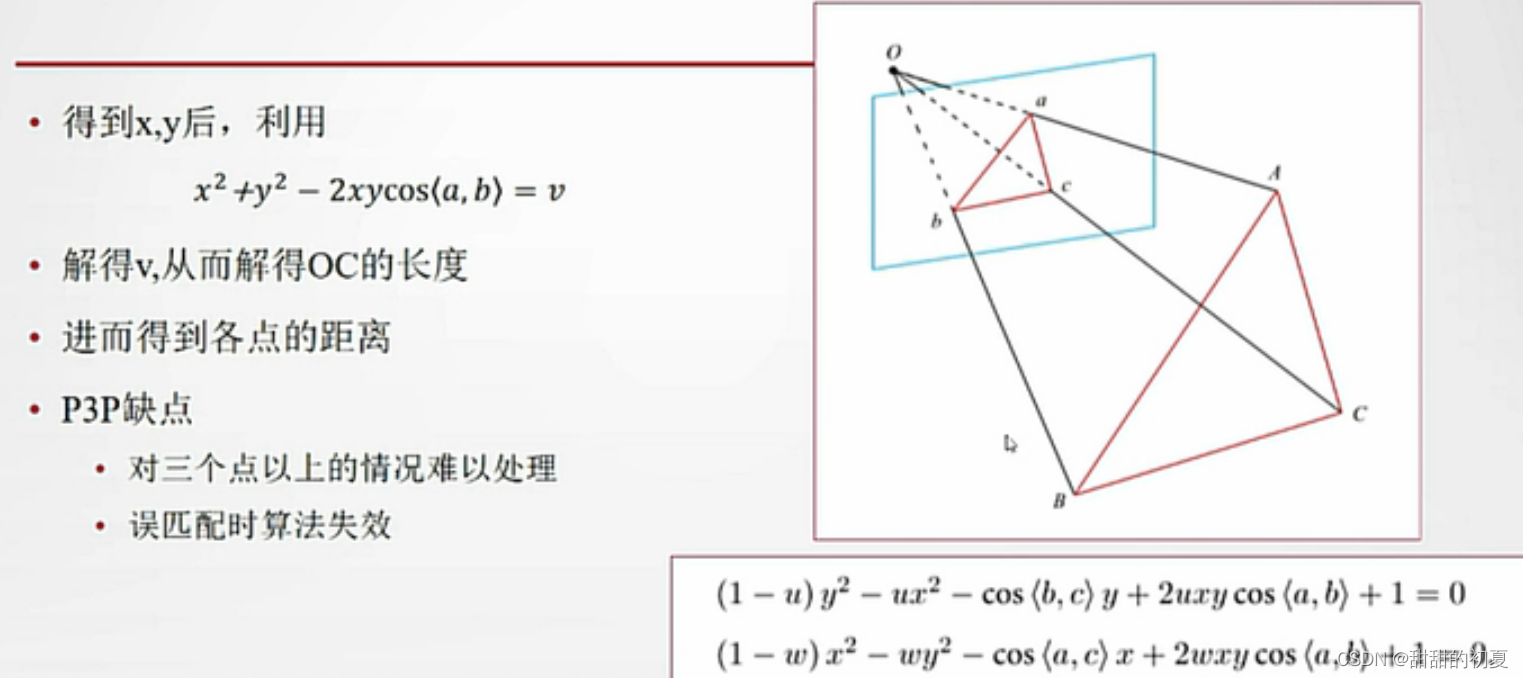
方程解得xy后,可以推OA,OB,OC的值,得到ABC点在相机坐标系下的坐标
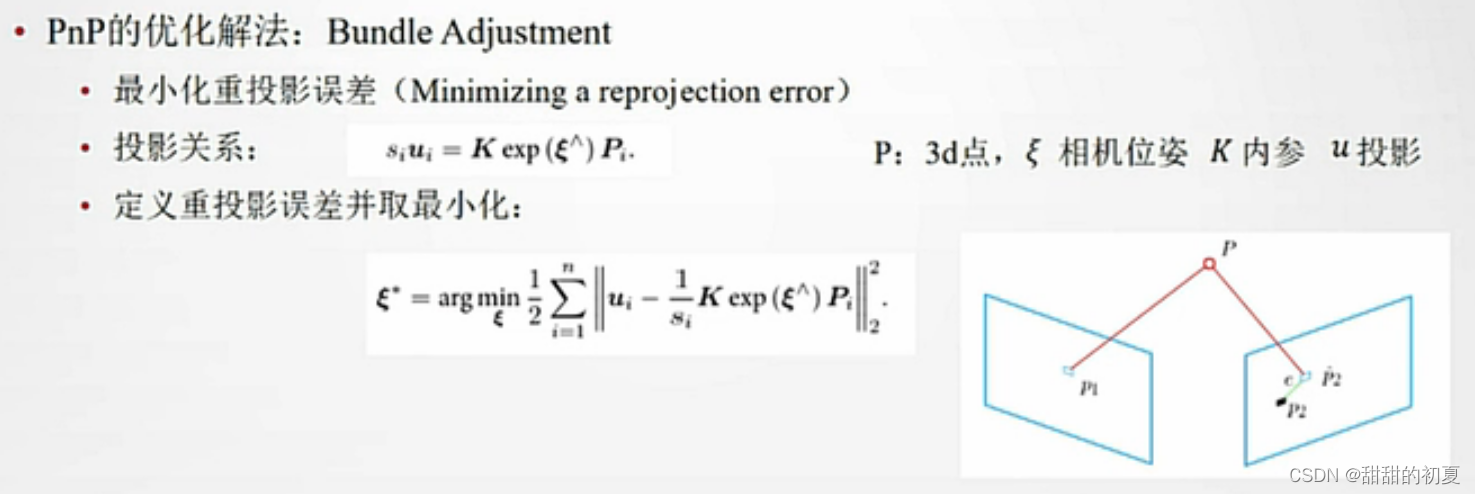
p2^为P点在相机坐标系下的投影的初始值,p2为真实值,以现在的旋转和平移的值投影得到的坐标和真实坐标之间的距离为误差e,使得误差最小化。
假设重投影的点为u,ui为第i个点。u为观测到的点,右边方程里面的RT关系是计算得到的,两者一般不相等(上图中,投影关系是用李代数表示的)
将像素坐标(观测到的投影位置)与 3D 点按照当前估计的位姿进行投影得到的位置相比较得到的误差,所以称之为
重投影误差
。
参考文献