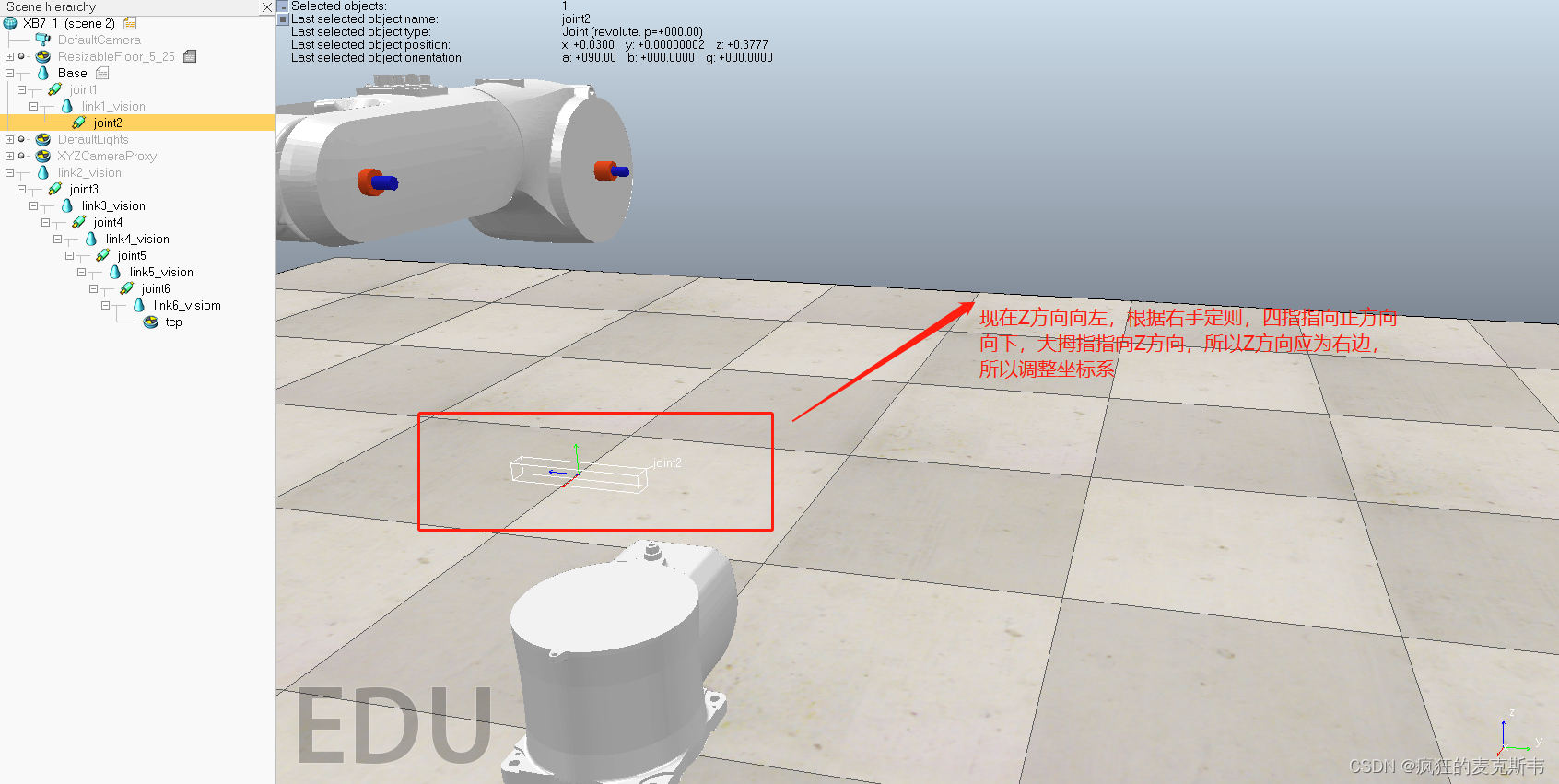
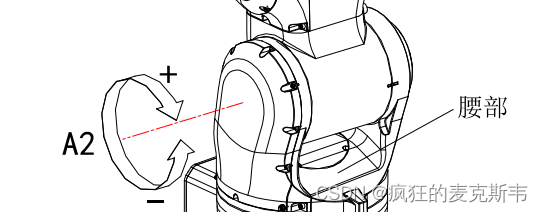
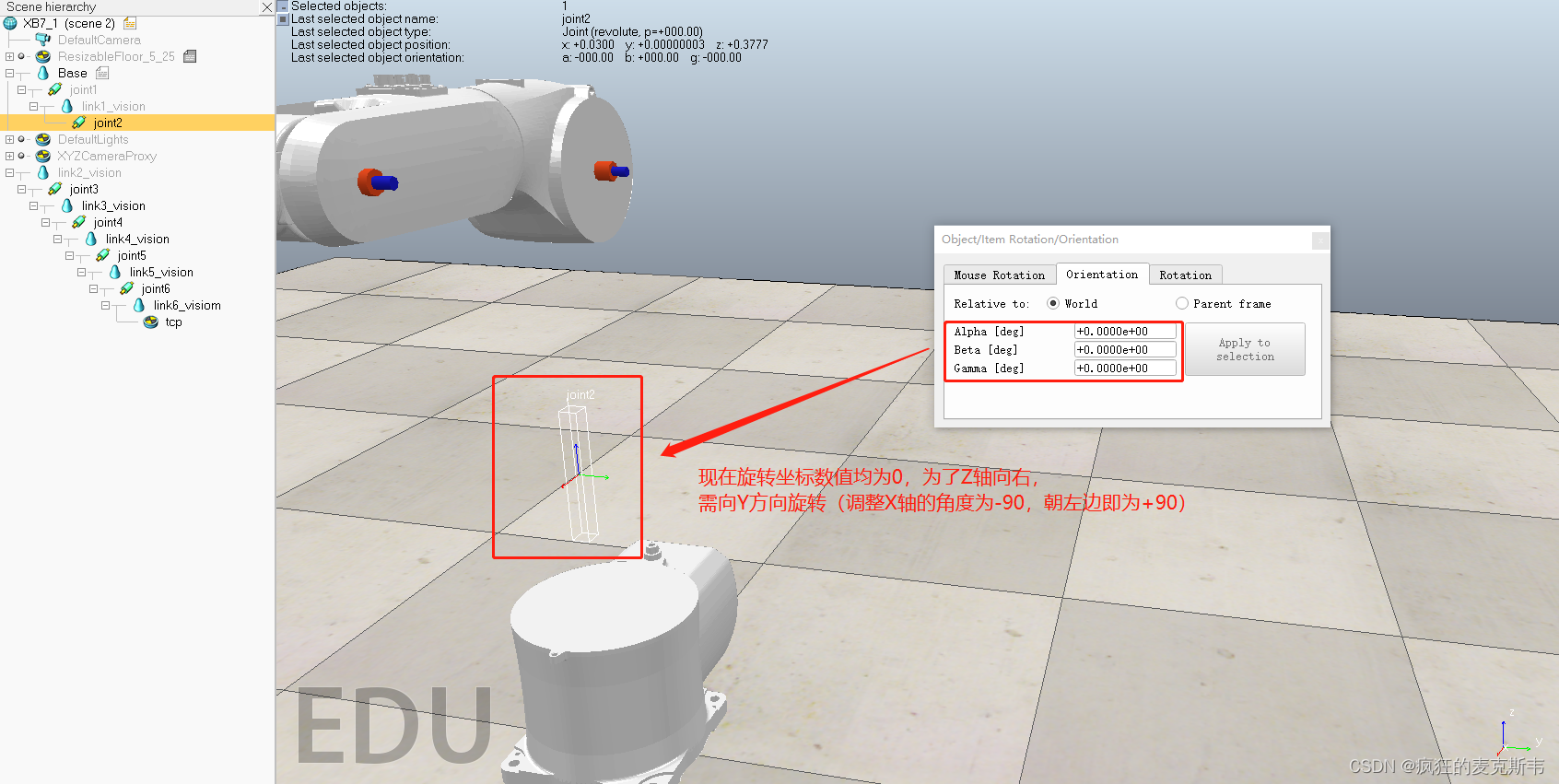
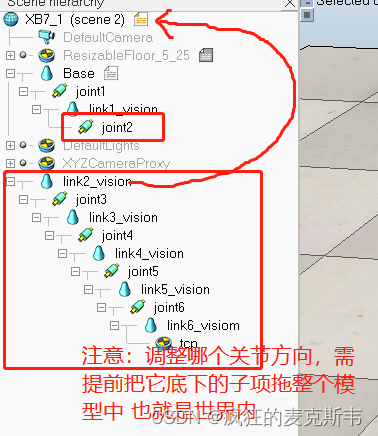
Vrep(CoppeliaSim)导入机械臂模型添加旋转关节
猜你喜欢
转载自blog.csdn.net/J_WangJiang/article/details/124984989
今日推荐
周排行